- Электрические и электрогидравлические рулевые машины
- Рулевое устройство
- Типы рулей
- Типы рулей
- Рулевое устройство с электрическим приводом
- а — расположение рулевого устройства
- b — секторная рулевая передача с электрическим приводом
- Рулевое устройство с гидравлическим приводом
- Электрическая рулевая машина, конструкция и принцип действия
Электрические и электрогидравлические рулевые машины
Электрические рулевые машины широко применяются на судах сравнительно небольшого водоизмещения. В качестве исполнительного рулевого двигателя они имеют электродвигатель, соединенный с червячной передачей, передающей крутящий момент на зубчатый сектор баллера руля и позволяющей значительно уменьшить частоту вращения рулевого привода. Кроме того, самотормозящая червячная пара (червяк и червячное колесо) при остановке электродвигателя обеспечивает остановку руля. Исполнительный электродвигатель управляется из рулевой рубки нажатием кнопки или вращением штурвала.
Электрогидравлические рулевые машины наибольшее распространение получили на отечественных судах современной постройки. По сравнению с другими видами машин они имеют ряд преимуществ, важнейшими из которых являются: получение больших крутящих моментов, малые массы и габариты на единицу мощности, плавное изменение скорости перекладки руля, высокий КПД.
Машины серии Р разработаны на основе типизированной конструкции, включающей 14 типоразмеров рулевых машин, входящих в пять конструктивных групп и рассчитанных на крутящий момент 6,3— 1600 кН·м (0,03—160 тс·м). На рис. 2 показана схема электрогидравлической рулевой машины. Основные узлы машины: привод к баллеру А; электронасосы регулируемой производительности Б с приводом от электродвигателя; механизм управления насосами В со штурвальной тумбой; трубопроводы рабочего масла Д с главной клапанной коробкой; теледвигатели Г, предназначенные для гидравлического управления рулевой машиной с удаленных постов управления № 1 и № 2.
Электронасосы регулируемой производительности подают масло в гидравлические цилиндры под давлением до 15 тыс. кН/м 2 (150 кгс/см 2 ). В показанном на схеме положении рабочее масло по трубам 5 и 6 нагнетается насосом Б регулируемой производительности в главную коробку 7, а из нее по трубам 4 и 8 — направляется в два гидравлических цилиндра 2, расположенных по диагонали. В это время из противоположных полостей другой пары цилиндров масло отсасывается вторым насосом регулируемой производительности. Под давлением масла плунжеры 1 перемещаются вдоль осей цилиндров, передавая усилия на цапфы 9 поперечного румпеля 10, и поворачивают баллер А руля. Поворот руля (в данном случае на правый борт) будет происходить до тех пор, пока тяга 3 не возвратит направляющее кольцо насоса регулируемой производительности в среднее положение. При этом подача масла в гидравлические цилиндры прекратится, и руль будет зафиксирован в заданном положении.
На рис. 3 показано устройство насоса регулируемой производительности. Насос состоит из нечетного числа звездообразно расположенных цилиндров 1, представляющих собой одну общую отливку и вращающихся в одном направлении. Неподвижная перегородка 9 делит центральную часть на две полости, к которым подведены трубы 3 и 8. При вращении ротора каждый цилиндр своим нижним открытым концом попеременно сообщается с трубами.
В цилиндрах перемещаются скалки 2, шарнирно соединенные с ползунами 5, которые скользят по внутренней поверхности кольца 4, служащего направляющей для ползунов. Кольцо может перемещаться вправо или влево при помощи цапф 7 и 10, проходящих через станину 6 насоса. Когда кольцо 4 перемещено вправо (рис. 3, а), при вращении ротора с цилиндрами против часовой стрелки всасывание будет осуществляться по трубе 8, а нагнетание — по трубе 3. Если кольцо займет крайнее левое положение (рис. 3, б), назначение труб изменится. При среднем положении кольца (рис. 3, в) расстояния от оси вращения ротора до внутренней поверхности кольца будут по радиальным направлениям одинаковы, поэтому скалки в цилиндрах перемещаться не будут и насос перестанет подавать масло. Следовательно, путем перемещения кольца 4 из среднего положения в любое крайнее можно регулировать производительность насоса от нулевой до максимальной и изменять направление жидкости в трубопроводе.
Привод к баллеру руля (рис. 4) расположен в румпельном помещении судна. Он передает от рулевой машины непосредственно на баллер усилие, необходимое для поворота руля. Для этого предназначены четыре (или два) гидравлических цилиндра 3, соединенных посредством двух поперечных 2 и двух продольных 4 балок в один общий блок. Крепление блока к фундаменту производится лапами 1 цилиндра 3.
В цилиндрах расположены плунжеры 6, перемещающиеся вдоль оси цилиндра под давлением масла и шарнирно соединенные при помощи цапф 7 с румпелем 8. Румпель с помощью шпонок жестко соединен с баллером руля. Для уменьшения нагрузки от боковых усилий, возникающих при повороте румпеля, плунжеры 6 снабжены ползунами 5, скользящими по направляющим плоскостям продольных балок. При повороте румпеля его цапфы 6 перемещаются в шарнирах 9, цапфы которых при этом могут вращаться в отверстиях вилок плунжеров вокруг оси. Таким образом, обеспечивается свободный поворот румпеля, а вместе с ним и руля при продольном перемещении плунжеров в гидравлических цилиндрах привода.
Гидравлический теледвигатель Г (см. рис. 2) состоит из двух цилиндров с поршнями. Один из цилиндров (передаточный) установлен на ходовом мостике, второй (приемный) — у рулевой машины. Полости цилиндров соединены трубопроводами, вся система заполнена жидкостью — обычно смесью воды с глицерином (глицерин предупреждает замерзание воды в зимнее время).
Вращение штурвала передается поршню передаточного цилиндра, вызывая его перемещение и увеличение давления жидкости на поршень приемного цилиндра, который вследствие этого перемещается, воздействуя через систему тяг на насосы регулируемой производительности, соединенные трубопроводом рабочего масла с приводом баллера руля. Таким образом, все основные узлы электрогидравлической рулевой машины оказываются соединенными между собой соответствующей аппаратурой и трубами рабочего масла и управления теледвигателем. Смазочное масло к трущимся частям рулевой машины подается по отдельному трубопроводу.
Источник статьи: http://www.stroitelstvo-new.ru/sudostroenie/slesar/rulevye-mashiny.shtml
Рулевое устройство
С помощью рулевого устройства можно изменять направление движения судна или удерживать его на заданном курсе. В последнем случае задачей рулевого устройства является противодействие внешним силам, таким как ветер или течение, которые могут привести к отклонению судна от заданного курса. Рулевые устройства известны с момента возникновения первых плавучих средств. В древности рулевые устройства представляли собой большие распашные весла, укрепленные на корме, на одном борту или на обоих бортах судна. Во времена средневековья их стали заменять шарнирным рулем, который помещался на ахтерштевне в диаметральной плоскости судна. В таком виде он и сохранился до наших дней.

Типы рулей
а — обыкновенный руль; b —балансирный руль; с — полубалансирный руль (полуподвесной); d — балансирный руль (подвесной); е — полубалансирный руль (полуподвесной); f — активный руль; g — носовое подруливающее устройство (гребные винты противоположного вращения); h — носовое подруливающее устройство (реверсивный гребной винт)
В зависимости от принципа действия различают пассивные и активные рули. Пассивными называются рулевые устройства, позволяющие производить поворот судна только во время хода, точнее сказать, во время движения воды относительно корпуса судна. В отличие от него активный руль позволяет осуществлять поворот судна независимо от того, движется оно или стоит. Пассивное рулевое устройство состоит из штурвальной колонки с передачей, рулевой машины и пера руля. В старых конструкциях использовались однослойные рули. В настоящее время главным образом применяют профильные фигурные рули (рис. а). Чем привлекательны vulkan официальный игровой бизнес запрещен на территории многих стран но Перо такого руля состоит из двух выпуклых наружных оболочек, имеющих с внутренней стороны ребра и вертикальные диафрагмы для повышения жесткости. В целом конструкция пера руля цельносварная и полая внутри. Существуют различные способы крепления руля. Его можно на шарнирах прикрепить к ахтерштевню (рис. а) или установить в подпятнике (рис. b). Другие способы закрепления показаны на рисунках с, е.
По положению пера руля относительно оси вращения баллера различают:
— обыкновенный руль — плоскость пера руля расположена за осью вращения;
— полубалансирный руль — только большая часть пера руля находится позади оси вращения, за счет чего возникает уменьшенный момент вращения при перекладке руля;
— балансирный руль — перо руля так расположено по обеим сторонам оси вращения, что при перекладке руля не возникают какие-либо значительные моменты.


Типы рулей
f — активный руль; g — носовое подруливающее устройство (гребные винты противоположного вращения); h — носовое подруливающее устройство (реверсивный гребной винт)
Пример рулевого устройства с активным рулем приведен на рисунке f. В перо руля встроен электродвигатель, приводящий во вращение гребной винт, который для защиты от повреждений помещен в насадку. За счет поворота пера руля вместе с гребным винтом на определенный угол возникает поперечный упор, обусловливающий поворот судна. Активный руль выполняет свои функции и тогда, когда судно стоит на якоре. Такой руль используется на специальных судах, таких как плавучие рыбозаводы, китобойные, ремонтные и вспомогательные. Кроме того, активный руль можно применять как аварийный двигатель. Рули, как правило, помещаются в корме судна. Только в особых случаях (например, на речных паромах или на судах для каналов) используют также носовые рули. Для повышения маневренности судна довольно часто применяют подруливающие устройства, относящиеся к группе активных рулей без пера. Носовые или кормовые подруливающие устройства устанавливают поперек судна в туннеле. В этом туннеле находятся также два гребных винта или ротор осевого насоса. При вращении одного гребного винта вода течет через туннель. За счет этого возникает упор, и корпус судна совершает движение. В подруливающих устройствах все чаще вместо двух гребных винтов или одного ротора осевого насоса используют гребные винты с переменным шагом. Как уже было указано, для того чтобы рулевая установка действовала, перо пассивного руля должно стоять под определенным углом. Баллер руля приводится во вращение рулевой машиной, установленной под палубой в корме судна. Существуют паровые, электрические и гидравлические рулевые машины.


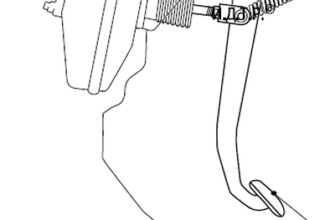
Рулевое устройство с электрическим приводом
а — расположение рулевого устройства
1 — рулевая машина; 2 — рулевой штырь; 3 — полубалансирный руль; 4 — баллер руля
b — секторная рулевая передача с электрическим приводом
1 — ручной штурвальный привод (аварийный привод); 2 — румпель; 3 — редуктор; 4 — рулевой сектор; 5 — двигатель; 6 — пружина; 7 — баллер руля; 8 — профильный фигурный руль; 9 — сегмент червячного колеса и тормоза; 10 — червяк
На рис. b показана устаревшая конструкция электрической рулевой машины. Электродвигатель через редуктор приводит в движение рулевой сектор, который крепится на баллере руля. Две пружины, воспринимающие удары волн о перо руля, соединяют сектор руля с румпелем; последний в свою очередь через призматическую шпонку соединен с баллером руля, на котором помещен профильный руль. Если необходимо повернуть перо руля, нужно запустить мотор с определенной частотой вращения. При неисправности электрической рулевой машины руль приводится в движение с помощью управляемого вручную механизма, состоящего из штурвальной тумбы и штурвала. Путем поворота штурвала приводятся в движение червячное колесо и взаимодействующий с ним аварийный приводной сегмент, укрепленный непосредственно на баллере руля. Штурвальная тумба аварийной рулевой установки обычно монтируется в корме на верхней палубе судна. На современных судах, как правило, применяют гидравлические рулевые машины. При вращении рулевого колеса на мостике срабатывает датчик телемотора, Протекающее под давлением в трубопроводе масло вызывает перемещение приемника телемотора, за счет чего рулевой насос приводится в движение в соответствующем направлении.

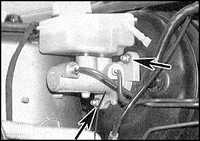
Рулевое устройство с гидравлическим приводом
а — схема гидропривода рулевого устройства типа Атлас с телемоторами; b — поршень гидравлической рулевой машины
1 — подключение к бортовой сети; 2 — кабельные соединения; 3 — запасная канистра; 4 — рулевой насос; 5 — рулевая колонка с датчиком телемотора; 6 — индикаторный прибор; 7 — приемник телемоторов; 8 — двигатель; 9 — гидравлическая рулевая машина; 10 — баллер руля; 11 — датчик указателя положения руля
Источник статьи: http://seaships.ru/steering.htm
Электрическая рулевая машина, конструкция и принцип действия
До конца 50-х годов прошлого столетия на речных и морских судах широкое применение имели электрические рулевые машины с моментом на баллере до 150кН·м.
Но в связи с развитием гидравлического привода, обладающего более высокой эффективностью, область распространения электрических рулевых машин постепенно ограничивалась и производство их для морских и речных судов прекращено. Однако на многих судах внутреннего и смешанного плавания электрические рулевые машины до сего времени находятся в эксплуатации. Общее представление об электрической рулевой машине дает схема на рис. 52.
Рулевой штурвал приводит в движение перемещающийся контакт реостата с сопротивлением Rw, имеющего электрическую связь со вторым реостатом, сопротивление в котором Rs меняется в зависимости от положения баллера.
Если, например, вращение штурвала совпадает с направлением стрелки, то сопротивление увеличивается. Генератор, напряжение, в обмотке которого контролируется регулятором, обеспечивает энергией исполнительный рулевой двигатель. Направление вращения исполнительного рулевого двигателя для рассматриваемого случая соответствует увеличению сопротивления Rs и уменьшению тока в регуляторе.
В момент, когда руль занимает нужное положение, сопротивление Rs становится равным Rw и исполнительный рулевой двигатель останавливается.
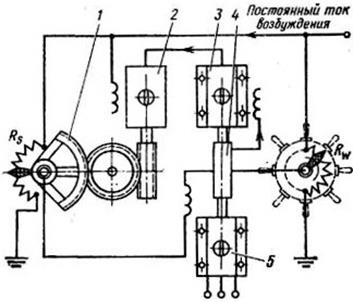 | 1 – сектор; 2 – рулевой двигатель; 3 – генератор; 4 – регулятор; 5 – привод генератора. |
| Рисунок 52 – Принципиальная схема электрической рулевой машины со следящей системой контроля |
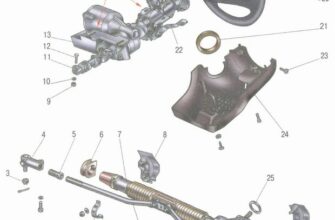
Рассмотрим конструктивное устройство типовой электрической рулевой машины, установленной на ряде судов, и в частности, на озерных буксирах-толкачах ОТ-800 (проект 758) мощностью 590кВт (рис. 53).
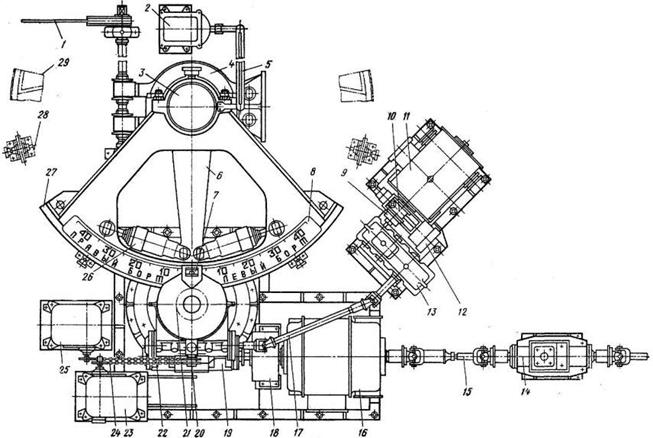 |
| Рисунок 53 – Схема электрической рулевой машины |
Данные толкачи являются двухвинтовыми, снабжены поворотными насадками, на каждой из них установлены две одинаковые рулевые машины, допускающие совместное и раздельное управление.
Валы основных электродвигателей 16 карданными валами 15 и электромагнитной муфтой 14 соединены для совместной работы в ходу. Во время маневров рулевые машины при отключенной электромагнитной муфте работают независимо, каждая на свой рулевой орган. Основной электродвигатель 16 постоянного тока, работающий по системе «двигатель – генератор – двигатель», эластичной муфтой 18 соединен с нижней червячной парой дифференциала Федорицкого 19, который вращает цилиндрическую шестерню 21, сцепленную с зубчатым сектором 27. Сектор, посаженный на баллер 3 свободно, поворачивает его через пружинные амортизаторы 26 и румпель 6, закрепленный на баллере с помощью шпонки. Электродвигатель 11 запасного привода получает питание от аккумуляторных батарей. Его вал с помощью эластичной муфты 9, двухступенчатого редуктора 13 и карданного вала 17 передает вращение верхней червячной паре дифференциала Федорицкого. Для более надежного предохранения ротора запасного электродвигателя от проворачивания при работе основным приводом на эластичной муфте 9 установлен колодочный тормоз 10 с электромагнитом 12.
Автоматическая остановка электродвигателей при достижении рулевыми органами крайних положений обеспечивается конечными выключателями 23 основного и 25 запасного приводов, размыкающими электрическую цепь питания электродвигателей. Привод к ним выполнен цепными передачами 24 и 22 от двух звездочек 20. При неисправности конечных выключателей поворот сектора ограничивают упоры 29. Чтобы предохранить механизм рулевой машины от ударов волн в рулевой орган, на ступицы румпеля установлены колодки 4 тормоза, который с помощью ручного привода 1 включается при длительной стоянке судна. На палубе в районе вращения сектора установлены 4 каточка 28, предохраняющие его от провисания под действием собственной массы. На секторе имеется шкала 8, а над ней неподвижный указатель 7, позволяющие на месте определить, на какой борт и угол отклонен рулевой орган. С помощью рычага 5 и датчика 2 электрического аксиометра показания отклонения рулевого органа передаются в штурвальную рубку.
Наличие дифференциала Федорицкого позволяет переходить с основного привода на запасный и, наоборот, без каких-либо переключений в машине.
Источник статьи: http://helpiks.org/3-65970.html