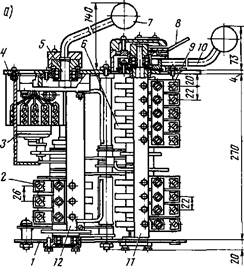
Основные функции по управлению тепловозом выполняет непосредственно машинист. Главным устройством, с помощью которого осуществляется управление тепловозом, является контроллер (рис. 195). Используя рукоятки контроллера, машинист приводит в движение тепловоз, увеличивает или уменьшает мощность, развиваемую дизелем, а значит, и скорость движения тепловоза, изменяет направление его движения. Контроллер позволяет преобразовать действия машиниста в электрические сигналы. Эти сигналы по проводам передаются к контакторам, реверсору, реле и другим аппаратам, непосредственно управляющим локомотивом.
Рис. 195. Контроллер машиниста
Контроллер тепловоза снабжен двумя рукоятками: главной и реверсивной . Реверсивная рукоятка может быть установлена в два крайних положения: «Вперед» и «Назад». При среднем положении реверсивной рукоятки контроллер запирается в выключенном состоянии. Главная рукоятка на тепловозах ТЭЗ имеет 17, на тепловозах 2ТЭ10Л и 2ТЭ10В — 16 фиксированных положений (позиций). Первое положение соответствует холостой работе дизеля, при последующих положениях тепловоз приводится в движение. Главная рукоятка соединена с помощью зубчатого сектора и зубчатого колеса с верхним концом главного вала контроллера. Рукоятка вместе с валом может поворачиваться во втулочных подшипниках, запрессованных в крышку, верхнее и нижнее основания контроллера.
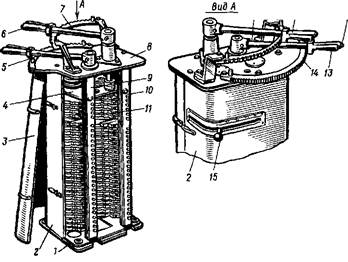
На нижней части главного вала расположены кулачковые шайбы, которые и управляют контактами, замыкающими соответствующие электрические цепи. Замыкание цепи управления происходит при соприкосновении подвижного и неподвижного контактов (рис. 196). Неподвижные контакты укреплены на текстолитовой доске.
Рис. 196. Кулачковый элемент контроллера
Параллельно на второй текстолитовой доске шарнирно на осях установлены пальцы с подвижными контактами. Палец своим роликом опирается на боковую поверхность кулачковой шайбы, имеющей один или несколько вырезов. Шайбы, изготовленные из изоляционного материала, укреплены на главном валу контроллера. Когда машинист поворачивает главную рукоятку контроллера, то вместе с валом поворачиваются и шайбы. Наконец, рукоятка поставлена в такое положение, когда ролик подвижного контакта попадает в вырез шайбы. При этом подвижный и неподвижный контакты замыкаются под действием включающей пружины. Они останутся замкнутыми при перемещении главной рукоятки на следующие позиции до тех пор, пока не окончится вырез шайбы. Таким образом, в зависимости от длины вырезов и их количества в шайбе можно осуществлять замыкание контактов на нужных позициях контроллера. Контроллер имеет необходимое число пар подвижных и неподвижных контактов в соответствии с количеством замыкаемых цепей управления.
Кроме шайб, на главном валу контроллера установлен реверсивный барабан , представляющий собой цилиндр с двумя шайбами, по виду аналогичными остальным шайбам (см. рис, 195). На шайбы опираются ролики двух подвижных контактов. Реверсивная рукоятка с помощью своего вала, поводка и тяги соединена с реверсивным барабаном. Барабан свободно надет на главный вал и поворачивается только реверсивной рукояткой.
Вырезы на шайбах реверсивного барабана расположены так, что при среднем положении реверсивной рукоятки оба подвижных контакта отведены от неподвижных. В каждом крайнем положении рукоятки замыкается одна пара контактов. Подается электрический сигнал, устанавливающий реверсор в положение, которое обеспечит движение тепловоза в заданном реверсивной рукояткой направлении.
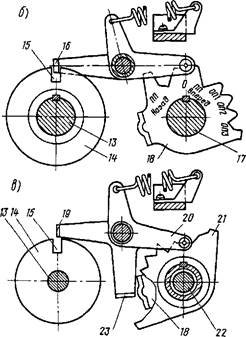
В верхней части главного вала расположен фиксатор положений главной рукоятки (рис. 197).
Рис. 197. Схема блокировочного и фиксирующего механизмов рукояток контроллера
Он состоит из двух храповиков с вырезами, в которые входят ролики фиксирующих рычагов, и сектора между храповиками. Главная рукоятка устанавливается только в свои фиксированные положения, когда один из роликов входит в вырез храповика. Три положения реверсивной рукоятки фиксируются с помощью аналогичного устройства. Лишь блокировочный рычаг имеет вместо ролика простой выступ, который входит в пазы храповика, укрепленного на реверсивном валу. Этот рычаг одновременно выполняет и функции запирающего устройства контроллера. При среднем (выключенном) положении реверсивной рукоятки выступ рычага входит в неглубокий паз храповика, фиксирующего положение реверсивной рукоятки. Выступ с другой стороны рычага заходит в паз сектора, фиксирующего положение главной рукоятки. При этом главная рукоятка должна обязательно находиться в положении «Холостой ход». Теперь можно снять реверсивную рукоятку и спокойно отойти от пульта управления. Если сейчас и попытаться перевести главную рукоятку в первое рабочее положение, когда тепловоз начинает двигаться, то этого не получится. Главную рукоятку удержит выступ блокировочного рычага.
После перевода реверсивной рукоятки в одно из крайних рабочих положений ее блокировочный рычаг уходит в более глубокий вырез храповика реверсивного вала. Противоположный выступ рычага выйдет из выреза сектора главного вала. Только теперь можно перевести главную рукоятку. С другой стороны, после перевода главной рукоятки в рабочее положение нельзя повернуть реверсивную рукоятку — ее не пустит блокировочный рычаг. Он упрется в цилиндрическую поверхность сектора главного вала. Благодаря этому при случайном нажатии на реверсивную рукоятку во время движения не может произойти перевод тепловоза на обратный ход. Следовательно, такая простая механическая блокировка обеспечивает перевод главной рукоятки только при рабочем положении реверсивной рукоятки и перевод реверсивной рукоятки только после установки главной рукоятки в положение «Холостой ход».
От прикосновений к токоведущим частям, от загрязнений, повреждений контроллер защищен кожухом. На ряде новых тепловозов главная рукоятка для удобства работы машиниста выполняется в виде штурвала.
Источник статьи: http://pomogala.ru/teplovoz/teplovoz_33.html

Основные функции по управлению тепловозом выполняет непосредственно машинист. Главным устройством, с помощью которого осуществляется управление тепловозом, является контроллер (рис. 195). Используя рукоятки контроллера, машинист приводит в движение тепловоз, увеличивает или уменьшает мощность, развиваемую дизелем, а значит, и скорость движения тепловоза, изменяет направление его движения. Контроллер позволяет преобразовать действия машиниста в электрические сигналы. Эти сигналы по проводам передаются к контакторам, реверсору, реле и другим аппаратам, непосредственно управляющим локомотивом.
Рис. 195. Контроллер машиниста
Контроллер тепловоза снабжен двумя рукоятками: главной и реверсивной . Реверсивная рукоятка может быть установлена в два крайних положения: «Вперед» и «Назад». При среднем положении реверсивной рукоятки контроллер запирается в выключенном состоянии. Главная рукоятка на тепловозах ТЭЗ имеет 17, на тепловозах 2ТЭ10Л и 2ТЭ10В — 16 фиксированных положений (позиций). Первое положение соответствует холостой работе дизеля, при последующих положениях тепловоз приводится в движение. Главная рукоятка соединена с помощью зубчатого сектора и зубчатого колеса с верхним концом главного вала контроллера. Рукоятка вместе с валом может поворачиваться во втулочных подшипниках, запрессованных в крышку, верхнее и нижнее основания контроллера.
На нижней части главного вала расположены кулачковые шайбы, которые и управляют контактами, замыкающими соответствующие электрические цепи. Замыкание цепи управления происходит при соприкосновении подвижного и неподвижного контактов (рис. 196). Неподвижные контакты укреплены на текстолитовой доске.
Рис. 196. Кулачковый элемент контроллера
Параллельно на второй текстолитовой доске шарнирно на осях установлены пальцы с подвижными контактами. Палец своим роликом опирается на боковую поверхность кулачковой шайбы, имеющей один или несколько вырезов. Шайбы, изготовленные из изоляционного материала, укреплены на главном валу контроллера. Когда машинист поворачивает главную рукоятку контроллера, то вместе с валом поворачиваются и шайбы. Наконец, рукоятка поставлена в такое положение, когда ролик подвижного контакта попадает в вырез шайбы. При этом подвижный и неподвижный контакты замыкаются под действием включающей пружины. Они останутся замкнутыми при перемещении главной рукоятки на следующие позиции до тех пор, пока не окончится вырез шайбы. Таким образом, в зависимости от длины вырезов и их количества в шайбе можно осуществлять замыкание контактов на нужных позициях контроллера. Контроллер имеет необходимое число пар подвижных и неподвижных контактов в соответствии с количеством замыкаемых цепей управления.
Кроме шайб, на главном валу контроллера установлен реверсивный барабан , представляющий собой цилиндр с двумя шайбами, по виду аналогичными остальным шайбам (см. рис, 195). На шайбы опираются ролики двух подвижных контактов. Реверсивная рукоятка с помощью своего вала, поводка и тяги соединена с реверсивным барабаном. Барабан свободно надет на главный вал и поворачивается только реверсивной рукояткой.
Вырезы на шайбах реверсивного барабана расположены так, что при среднем положении реверсивной рукоятки оба подвижных контакта отведены от неподвижных. В каждом крайнем положении рукоятки замыкается одна пара контактов. Подается электрический сигнал, устанавливающий реверсор в положение, которое обеспечит движение тепловоза в заданном реверсивной рукояткой направлении.
В верхней части главного вала расположен фиксатор положений главной рукоятки (рис. 197).
Рис. 197. Схема блокировочного и фиксирующего механизмов рукояток контроллера
Он состоит из двух храповиков с вырезами, в которые входят ролики фиксирующих рычагов, и сектора между храповиками. Главная рукоятка устанавливается только в свои фиксированные положения, когда один из роликов входит в вырез храповика. Три положения реверсивной рукоятки фиксируются с помощью аналогичного устройства. Лишь блокировочный рычаг имеет вместо ролика простой выступ, который входит в пазы храповика, укрепленного на реверсивном валу. Этот рычаг одновременно выполняет и функции запирающего устройства контроллера. При среднем (выключенном) положении реверсивной рукоятки выступ рычага входит в неглубокий паз храповика, фиксирующего положение реверсивной рукоятки. Выступ с другой стороны рычага заходит в паз сектора, фиксирующего положение главной рукоятки. При этом главная рукоятка должна обязательно находиться в положении «Холостой ход». Теперь можно снять реверсивную рукоятку и спокойно отойти от пульта управления. Если сейчас и попытаться перевести главную рукоятку в первое рабочее положение, когда тепловоз начинает двигаться, то этого не получится. Главную рукоятку удержит выступ блокировочного рычага.
После перевода реверсивной рукоятки в одно из крайних рабочих положений ее блокировочный рычаг уходит в более глубокий вырез храповика реверсивного вала. Противоположный выступ рычага выйдет из выреза сектора главного вала. Только теперь можно перевести главную рукоятку. С другой стороны, после перевода главной рукоятки в рабочее положение нельзя повернуть реверсивную рукоятку — ее не пустит блокировочный рычаг. Он упрется в цилиндрическую поверхность сектора главного вала. Благодаря этому при случайном нажатии на реверсивную рукоятку во время движения не может произойти перевод тепловоза на обратный ход. Следовательно, такая простая механическая блокировка обеспечивает перевод главной рукоятки только при рабочем положении реверсивной рукоятки и перевод реверсивной рукоятки только после установки главной рукоятки в положение «Холостой ход».
От прикосновений к токоведущим частям, от загрязнений, повреждений контроллер защищен кожухом. На ряде новых тепловозов главная рукоятка для удобства работы машиниста выполняется в виде штурвала.
Источник статьи: http://www.pomogala.ru/teplovoz/teplovoz_33.html
Контроллеры машиниста




![]()
Контроллеры машиниста служат для дистанционного (косвенного) управления работой тяговых двигателей в тяговом и тормозном режимах; с их помощью подключают к источнику низкого напряжения и отключают в определенной последовательности провода цепи управления, т. е. включают и выключают в определенной последовательности высоковольтные аппараты при пуске, регулировании скорости движения, остановке, изменении направления движения и электрическом торможении электровоза или электропоезда. Контроллер машиниста имеет ряд рукояток, каждая из которых предназначена для определенных операций управления и имеет несколько фиксированных позиций, соответствующих определенным включениям аппаратов силовой цепи.
При конструировании контроллеров должны быть соблюдены требования, обеспечивающие простоту и легкость пользования ими и наиболее простую кинематику блокировочных механизмов; наименьшие массу и габаритные размеры аппарата; надежность работы его переключающих устройств, удобство осмотра и ремонта всех его деталей. Распределение функций управления и расположение отдельных рукояток контроллера выполняют так, чтобы обеспечить простоту и удобство пользования ими и не допускать отвлечения машиниста от наблюдения за сигналами, путем и контактной сетью. Механические блокировки в контроллере создают взаимозависимость между рукоятками, что предотвращает ошибочные действия машиниста.
Одну из рукояток, чаще всего реверсивную или реверсивно-селективную, на каждом контроллере машиниста делают съемной. Съемная рукоятка может быть снята с аппарата только в нулевом поло жении, в которое ее можно поставить после возвращения других рукояток также в нулевое положение. Контроллер машиниста устанавливают в каждой кабине управления, а реверсивную или реверсивно-селективную рукоятку выдают одну на все контроллеры состава. Поэтому машинист не может случайно оставить какую-либо рукоятку на одном из контроллеров во включенном положении, так как это вызвало бы нарушение правильной работы электрических цепей при управлении составом с другого контроллера.
По конструкции различают контроллеры машиниста барабанные, кулачковые и бесконтактные.
В барабанных контроллерах замыкание и размыкание цепей проводов управления осуществляют сегментами 2 при повороте барабана 1 на определенный угол. К сегменту 2 прижимаются пальцы 3, которые соединены с соответствующими проводами цепи управления. Пальцы укреплены на стойке 4
В кулачковых контроллерах замыкание и размыкание цепей проводов управления осуществляют кулачковые контакторы (контакторные элементы), укрепленные на стойке 4, на которые воздействуют кулачковые шайбы 11.
При вращении рукояткой вала 12 контроллера кулачковая шайба 11 своим выступом 9 нажимает на ролик 8 и размыкает цепь контактами 5 и 6, к которым присоединены провода цепи управления. Как только выступ шайбы пройдет ролик, пружина 7 повернет рычаг 10 и снова замкнет контакты 5 и 6.
В барабанных контроллерах при скольжении пальцев по поверхности сегментов сильно изнашиваются их контактные поверхности. Износ увеличивается с увеличением длины пути скольжения пальцев, а также при образовании дуги на контактах. В этом отношении контроллеры барабанные уступают кулачковым, которые применяют на всем отечественном э. п, с. В качестве примера рассмотрим кулачковые контроллеры машиниста 1 КМ-84 и КМЭ-8.
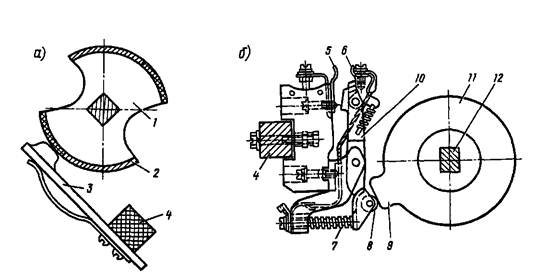 |
Рис. Схемы кулачковых контакторов контроллеров машиниста
Все узлы контроллера машиниста КМ-84 электровоза ВЛ80 С смонтированы между двумя рамами 1 и 4 , соединенными рейками 11 и 12. Группы кулачковых контакторов 2 и 9 приводятся в действие валами, которые соединены со своими рукоятками — главной 10, тормозной 7 и реверсивной 8. Рукоятка 8 съемная. Каждый вал состоит из стальной оси и насаженных на нее кулачковых изоляционных прессованных шайб 6. Все валы сблокированы между собой механически (рис. 219, б, в и г) с помощью дисков 14, 18, 21, рычагов 20, валов 5, 13, 17, 22, пружин и защелок 16, 19, 23 с пазами 15. Эти блокировки обеспечивают следующее:

возможность перемещения главной рукоятки 10 ) в любое положение при установке реверсивной 8 в положения ПП (Вперед или Назад), ОП1, ОП2, ОПЗ и тормозной рукоятки 7 в положение 0;
возможность перемещения тормозной рукоятки 7 в любое положение при установке реверсивной 8 в положение ПП (Вперед или Назад) и главной 10 в положение 0\
возможность перемещения реверсивной рукоятки 8 в положения ОП1, ОП2, ОПЗ при установке тормозной рукоятки 7 только в положение 0, а в положении 0 при установке главной 10 и тормозной 7 рукояток в положение 0\ невозможность перемещения главной
 |
 |
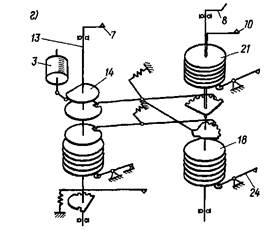 |
Рис. Общий вид (а), механические блокировкиреверсивного и тормозного валов (б), главного, реверсивного и тормозного валов (в) и кинематическая схема контроллера машиниста КМ-84 электровоза ВЛ80 С (г).
5— рукоятка главного вала,5— рукоятка тормозного вала; 7 — сектор зубчатый рукоятки тормозного вала, 8 — крышка (литая); 9 и 10 — стальные планкн, 11 — кулачковые контакторы, 12 — кнопка в торце рукоятки для выдержки времени при переходе с одного соединения тяговых двигателей на другое, 13 — фиксатор, 14 — сектор зубчатый рукоятки главного вала,15 — съемная рукоятка реверсивно-селек-
10 и тормозной 7 рукояток при нахождении реверсивной 8 в положении 0.
Главный вал 22 расположен соосно с реверсивным 17, имеет положения: 0 — нулевое, АВ — автоматическое выключение, РВ — ручное выключение, ФВ — фиксация выключения, ФП — фиксация пуска, РП — ручной пуск, АП — автоматический пуск, БВ — быстрое выключение.
Положения 0, АВ, РВ, ФВ, ФП, РП — фиксированные, положения АП и БВ с самовозвратом.
Реверсивный вал 17 имеет положения 0 — нулевое; ПП (Вперед) — полное возбуждение; ОП1, ОП2, ОПЗ — соответственно первая, вторая, третья ступени ослабления возбуждения; ПП (Наад) — полное возбуждение. Все позиции реверсивного переключателя фиксированные.
Тормозной вал 13 устанавливается в следующие фиксированные положения: 0 — нулевое, Я — подготовка цепи к торможению, ПТ — предварительное торможение с тормозной силой до 12-10 4 Н (12 тс), Торможение. Положения 0, П, ПТ и крайние положения зоны Торможение фиксированные, положения зоны Торможение нефиксированные На валу 13 установлена профильная шайба, с помощью которой производится поворот ротора сельсина-датчика торможения 3; от угла поворота а тормозного вала зависит напряжение /7ВЫХ (например, при а = 270° напряжение /7аых = 0, при а = 60° — UBUX = 24,5 В)
Контроллеры машинистов электровозов ВЛ80 Т по конструкции аналогичны контроллеру КМ-84. Конструкция контроллера электровозов ВЛ8, ВЛ10, ВЛ10 У .
Назначение и технические данные. Контроллер машиниста служит для дистанционного управления работой тяговых электродвигателей. Технические данные контроллера следующие:
Источник статьи: http://studopedia.ru/3_170389_kontrolleri-mashinista.html