- Синхронный и асинхронный двигатель отличия
- Подписка на рассылку
- Синхронный и асинхронный двигатель – отличия для чайников
- Асинхронный двигатель
- Синхронный двигатель
- Недостатки и преимущества двигателей
- Электродвигатели
- Конструкция электродвигателя
- Принцип работы электродвигателя
- Классификация электродвигателей
- Типы электродвигателей
- Коллекторные электродвигатели
- Универсальный электродвигатель
- Коллекторный электродвигатель постоянного тока
- Бесколлекторные электродвигатели
- Асинхронный электродвигатель
- Cинхронный электродвигатель
- Специальные электродвигатели
- Серводвигатель
- Основные параметры электродвигателя
- Момент электродвигателя
- Мощность электродвигателя
- Механическая мощность
- Коэффициент полезного действия электродвигателя
- Частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- Механическая характеристика
- Сравнение характеристик внешне коммутируемых электрических двигателей
- Области применения электродвигателей
Синхронный и асинхронный двигатель отличия
Подписка на рассылку
 Для приведения в движение различных станков или механизмов на предприятиях тяжелой и легкой промышленности в большинстве случаев используются электродвигатели переменного тока. Электрические машины постоянного тока распространены в меньшей мере и чаще всего применяются в качестве тяговых агрегатов на городском электротранспорте, поездах, складских погрузчиках и тележках.
Для приведения в движение различных станков или механизмов на предприятиях тяжелой и легкой промышленности в большинстве случаев используются электродвигатели переменного тока. Электрические машины постоянного тока распространены в меньшей мере и чаще всего применяются в качестве тяговых агрегатов на городском электротранспорте, поездах, складских погрузчиках и тележках.
Чтобы достичь максимальной энергоэффективности производственных процессов, нужно правильно подходить к выбору двигателя для привода.
Синхронный и асинхронный двигатель – отличия для чайников
Конструкция асинхронных и синхронных электрических машин практически одинакова. У обоих электродвигателей есть неподвижный статор, состоящий из обмоток (катушек), которые уложены в пазы сердечника, набранного из пластин, выполненных из электротехнической стали, и подвижный ротор. Обмотки статора сдвинуты друг относительно друга на угол, равный 120°, поэтому проходящий по ним электрический ток создает вращающееся магнитное поле, которое вовлекает в движение ротор. Вот именно здесь и проявляется основное отличие этих электрических машин – конструкция ротора, от которой зависит скорость его вращения.
 Асинхронный двигатель
Асинхронный двигатель
 Асинхронный двигатель
Асинхронный двигательРотор такого двигателя может быть короткозамкнутым или фазным.
Вне зависимости от типа ротора в этих двигателях частота вращения ротора всегда будет меньше скорости вращения магнитного поля статора. Эта разница обусловлена законами физики:
- силовые линии магнитного поля статора, пересекая замкнутый контур ротора, индуцируют в нем электродвижущую силу, а значит и собственное магнитное поле;
- в результате взаимодействия этих полей, имеющих одинаковую полярность, возникает крутящий момент, вызывающий вращение ротора;
- в тот момент, когда скорости вращения магнитных полей становятся одинаковыми, возникновение ЭДС в роторе прекращается, в результате чего крутящий момент стремится к нулю;
- как только частота вращения ротора начинает отставать от скорости вращения поля статора, возникновение ЭДС возобновляется.
Синхронный двигатель
 Синхронный двигатель
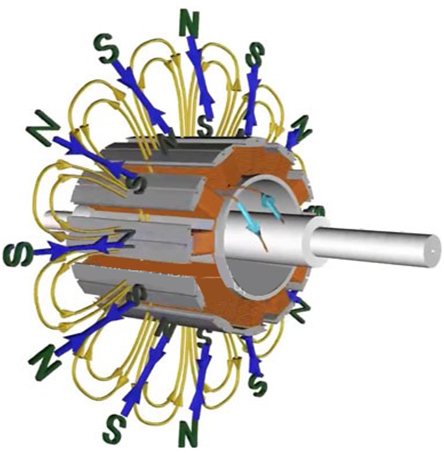
Синхронный двигательРотор таких двигателей комплектуется постоянными магнитами или обмотками возбуждения. Обмотки могут быть как явнополюсными, так и распределенными (уложенными в пазы ротора). Кроме того, ротор синхронной машины может иметь и короткозамкнутые обмотки.
После разгона ротора до скорости близкой к частоте вращения магнитного поля статора, на катушки полюсов через щеточно-контактный узел подается постоянное напряжение, которое возбуждает в них постоянное магнитное поле. Противоположные полюса магнитных полей притягиваются друг к другу и частота вращения ротора становится синхронной.
Разгон ротора может осуществляться с помощью вспомогательного двигателя или в асинхронном режиме, благодаря короткозамкнутой обмотке.
Недостатки и преимущества двигателей
Синхронные двигатели имеют довольно сложную конструкцию, обусловленную наличием щеточного узла. Кроме того, для их работы требуется дополнительный источник постоянного тока. Еще одним недостатком является невозможность их эксплуатации в условиях частых пусков и остановов. Однако все это компенсируется большой мощностью, высоким КПД, устойчивостью к перепадам напряжения в питающей сети и стабильной частотой вращения вала, вне зависимости от величины нагрузки на него.
Асинхронный двигатель в отличие от синхронных машин более чувствителен к колебаниям напряжения и не может сохранять номинальную скорость вращения, при увеличении нагрузки. Но простота конструкции, длительный срок эксплуатации, универсальность применения, способность работать в режиме частых включений и остановок делают эти машины наиболее распространенными в промышленном и бытовом секторе.
Источник статьи: http://cable.ru/articles/id-2204.php
Электродвигатели
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является — электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор — неподвижная часть, ротор — вращающаяся часть.

У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя




- Подробное описание принципа работы электродвигателей разных типов:
- Принцип работы однофазного асинхронного электродвигателя
- Принцип работы трехфазного асинхронного электродвигателя
- Принцип работы синхронного электродвигателя
Классификация электродвигателей
| Вращающийся электродвигатель | ||||
|---|---|---|---|---|
| Само коммутируемый | Внешне коммутируемый | |||
| С механической коммутацией (коллекторный) | С электронной коммутацией 1 (вентильный 2, 3 ) | Асинхронный электродвигатель | Синхронный электродвигатель | |
| Переменного тока | Постоянного тока | Переменного тока 4 | Переменного тока | |
|
|
|
|
|
| Простая электроника | Выпрямители, транзисторы | Более сложная электроника | Сложная электроника (ЧП) | |
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
- АДКР — асинхронный двигатель с короткозамкнутым ротором
- АДФР — асинхронный двигатель с фазным ротором
- СДОВ — синхронный двигатель с обмоткой возбуждения
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина — вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель

Коллекторный электродвигатель постоянного тока
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина — вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].

Асинхронный электродвигатель

Cинхронный электродвигатель
Специальные электродвигатели

Серводвигатель
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
 ,
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
 ,
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин -1 [4]
Начальный пусковой момент — момент электродвигателя при пуске.
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
 ,
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].
 ,
,
Для вращательного движения
 ,
,
- где – угол, рад,
 – угол, рад,
– угол, рад, ,
,
- где – углавая скорость, рад/с,
 – углавая скорость, рад/с,
– углавая скорость, рад/с,Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
 ,
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (механическая), Вт
 – коэффициент полезного действия электродвигателя,
– коэффициент полезного действия электродвигателя,- При этом потери в электродвигатели обусловлены:
- электрическими потерями — в виде тепла в результате нагрева проводников с током;
- магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Частота вращения

- где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
 ,
,
- где J – момент инерции, кг∙м 2 ,
- m — масса, кг
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением
 ,
,
- где – угловое ускорение, с -2 [2]
 – угловое ускорение, с -2 [2]
– угловое ускорение, с -2 [2] ,
,
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где – постоянная времени, с
 – постоянная времени, с
– постоянная времени, сМеханическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.


| Параметр |  АДКР |  СДПМП |  СДПМВ |  СРД-ПМ |  СДОВ |
|---|---|---|---|---|---|
| Постоянство мощности во всем диапазоне скоростей | |||||
| Эффективность (КПД) во всем рабочем диапазоне |
В соответствии с выше приведенными показателями гибридный синхронный электродвигатель, а именно синхронный реактивный электродвигатель со встроенными постоянными магнитами, является наиболее подходящим для применения в качестве тягового электродвигателя в автомобилестроении (выбор проводился для концепта автомобилей BMW i3 & BMW i8). Использование реактивного момента обеспечивает высокую мощность в верхнем диапазоне скоростей. Более того такой двигатель обеспечивает очень высокую эффективность (КПД) в широком рабочем диапазоне [7]. Области применения электродвигателейЭлектродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии [6]. Источник статьи: http://engineering-solutions.ru/motorcontrol/motor/ |