- Синхронные машины — двигатели, генераторы и компенсаторы
- Электрические машины
- Что такое электрические машины
- Введение в электрические машины
- Назначение и классификация электрических машин
- Преобразование энергии в электрических машинах
- Характеристики электрических машин
- Электрические машины переменного тока
- Вращающееся магнитное поле
- Асинхронные двигатели
- Устройство и принцип работы
- Потери энергии и коэффициент полезного действия
- Механическая характеристика АД
- Рабочие характеристики АД
- Пуск АД
- Регулирование частоты вращения АД
- Способы торможения АД
- Синхронные машины
- Устройство синхронных машин
- Синхронные генераторы
- Синхронные двигатели
- Синхронные компенсаторы
- Электрические машины постоянного тока
- Принцип действия и устройство машин постоянного тока
- Потери энергии и коэффициент полезного действия машин постоянного тока
- Генераторы постоянного тока
- Двигатели постоянного тока
- Сигналы
- Классификации сигналов
- Трансформаторы
- Назначение и устройство трансформатора
- Принцип действия трансформатора
- Уравнения и схема замещения трансформатора
- Внешняя характеристика и коэффициент полезного действия трансформатора
- Трехфазные трансформаторы
- Сварочный трансформатор и автотрансформатор
Синхронные машины — двигатели, генераторы и компенсаторы



Синхронная машина может работать генератором или двигателем. Синхронная машина может работать в качестве двигателя, если подвести к обмотке ее статора трехфазный ток из сети. В этом случае в результате взаимодействия магнитных полей статора и ротора поле статора увлекает за собой ротор. При этом ротор вращается в ту же сторону и с такой же скоростью, как и поле статора.

Наибольшее распространение получил генераторный режим работы синхронных машин, и почти вся электроэнергия вырабатывается синхронными генераторами. Синхронные двигатели применяются при мощности более 600 кВт и до 1 кВт как микродвигатели. Синхронные генераторы на напряжение до 1000 В применяются в агрегатах для автономных систем электроснабжения.
Агрегаты с этими генераторами могут быть стационарными и передвижными. Большинство агрегатов применяются с дизельными двигателями, но приводом их могут быть газовые турбины, электродвигатели и бензиновые двигатели.
Синхронный двигатель отличается от синхронного генератора лишь пусковой успокоительной обмоткой, которая должна обеспечивать хорошие пусковые свойства двигателя.
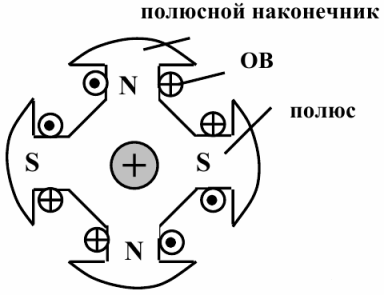
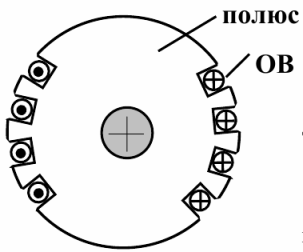
Схема шестиполюсного синхронного генератора. Показаны сечения обмоток одной фазы (три обмотки, соединенные последовательно). В показанные на рисунке свободные пазы укладываются обмотки двух других фаз. Фазы соединяются в звезду или треугольник.
Режим генератора: двигатель (турбина) вращает ротор, на обмотку которого подается постоянное напряжение ? возникает ток, который создает постоянное магнитное поле. Магнитное поле вращается вместе с ротором, пересекает статорные обмотки и наводит в них одинаковые по модулю и частоте ЭДС, но сдвинутые на 1200 (симметричная трехфазная система).
Режим двигателя: обмотку статора подключают к трёхфазной сети, а обмотку ротора к источнику постоянного тока. В результате взаимодействия вращающегося магнитного поля машины с постоянным током обмотки возбуждения, возникает вращающий момент Мвр, который приводит ротор во вращение со скоростью магнитного поля.
Механическая характеристика синхронного двигателя – зависимость n(M)– представляет собой горизонтальный отрезок прямой.
 Применение синхронных двигателей
Применение синхронных двигателей
Синхронные двигатели имеют по сравнению с асинхронными большое преимущество, заключающееся в том, что благодаря возбуждению постоянным током они могут работать с cosфи = 1 и не потребляют при этом реактивной мощности из сети, а при работе, с перевозбуждением даже отдают реактивную мощность в сеть. В результате улучшается коэффициент мощности сети и уменьшаются падение напряжения и потери в ней, а также повышается коэффициент мощности генераторов, работающих на электростанциях.
Максимальный момент синхронного двигателя пропорционален U, а у асинхронного двигателя U 2 .
Поэтому при понижении напряжения синхронный двигатель сохраняет большую нагрузочную способность. Кроме того, использование возможности увеличения тока возбуждения синхронных двигателей позволяет увеличивать их надежность работы при аварийных понижениях напряжения в сети и улучшать в этих случаях условия работы энергосистемы в целом. Вследствие большей величины воздушного зазора добавочные потери в стали и в клетке ротора синхронных двигателей меньше, чем у асинхронных, благодаря чему к. п. д. синхронных двигателей обычно выше.
С другой стороны, конструкция синхронных двигателей сложнее, чем короткозамкнутых асинхронных двигателей, и, кроме того, синхронные двигатели должны иметь возбудитель или иное устройство для питания обмотки возбуждения постоянным током. Вследствие этого синхронные двигатели в большинстве случаев дороже асинхронных двигателей с короткозамкнутым ротором.
При эксплуатации синхронных двигателей возникли существенные трудности с их пуском. В настоящее время эти трудности преодолены.

Пуск и регулирование скорости вращения синхронных двигателей также сложнее. Тем не менее, преимущество синхронных двигателей настолько велико, что при больших мощностях их целесообразно применять всюду, где не требуется частых пусков и остановок и регулирования скорости вращения (двигатель-генераторы, мощные насосы, вентиляторы, компрессоры, мельницы, дробилки и пр.).
Синхронные компенсаторы предназначаются для компенсации коэффициента мощности сети и поддержания нормального уровня напряжения сети в районах сосредоточения потребительских нагрузок. Нормальным являемся перевозбужденный режим работы синхронного компенсатора, когда он отдает в сеть реактивную мощность.
В связи с этим компенсаторы, как и служащие для этих же целей батареи конденсаторов, устанавливаемые на потребительских подстанциях, называют также генераторами реактивной мощности. Однако в периоды спада потребительских нагрузок (например, ночью) нередко возникает необходимость работы синхронных компенсаторов также в недовозбужденном режиме, когда они потребляют из сети индуктивный ток и реактивную мощность, так как в этих случаях напряжение сети стремится возрасти и для поддержания его на нормальном уровне необходимо загрузить сеть индуктивными токами, вызывающими в ней дополнительные падения напряжения.
Для этого каждый синхронный компенсатор снабжается автоматическим регулятором возбуждения или напряжения, который регулирует величину его тока возбуждения так, что напряжение на зажимах компенсатора остается постоянным.
Источник статьи: http://electricalschool.info/spravochnik/maschiny/1516-sinkhronnye-mashiny.html
Электрические машины

Здравствуйте, на этой странице я собрала краткий курс лекций по предмету «электрические машины».
Лекции подготовлены для студентов любых специальностей и охватывает курс предмета «электрические машины».
В лекциях вы найдёте основные законы, теоремы, формулы.
| Если что-то непонятно — вы всегда можете написать мне в WhatsApp и я вам помогу! |
Электрическая машина — это электромеханический преобразователь физической энергии, основанный на явлениях электромагнитной индукции и силы Ампера, действующей на проводник с током, движущийся в магнитном поле. wikipedia.org/wiki/Электрическая_машина
Что такое электрические машины
Электрические машины — это электромеханические преобразователи физической энергии, основанный на явлениях электромагнитной индукции и силы Ампера, действующей на проводники с током, движущийся в магнитном поле.
Введение в электрические машины
Назначение и классификация электрических машин
Электрическая машина (ЭМ) — это электромеханическое устройство, преобразующее механическую энергию в электрическую, электрическую энергию в механическую или электрическую энергию одного вида в электрическую энергию другого вида. В соответствии с этим, в первом случае электрическая машина называется электрическим генератором, во втором — электродвигателем и в третьем — преобразователем. Электрические машины обладают свойством обратимости, т. с. одна и та же ЭМ может работать как в режиме генератора, так и в режиме электродвигателя.
Электрические машины классифицируются по четырем признакам:
- по назначению;
- по роду тока;
- по мощности;
- в зависимости от частоты вращения.
В зависимости от назначения различают:
- электромашинные генераторы;
- электрические двигатели;
- электромашинные преобразователи;
- электромашинные компенсаторы;
- электромеханические преобразователи сигналов.
Электромашинные генераторы преобразуют механическую энергию в электрическую. Используются на электрических станциях и различных транспортных установках (автомобилях, самолетах, кораблях, передвижных электростанциях и др.). На электростанциях они приводятся во вращение с помощью мощных паровых и гидравлических турбин, а на транспортных установках — от двигателей внутреннего сгорания и газовых турбин.
Электрические двигатели преобразуют электрическую энергию в механическую. Они используются в различных машинах и устройствах в промышленности, сельском хозяйстве, связи, на транспорте и в быту. В системах автоматического управления они применяются в качестве исполнительных органов.
Электромашинные преобразователи предназначены для изменения параметров электрической энергии. Изменение может осуществляться по роду тока, напряжению, частоте, числу фаз, фазе напряжения.
Электромашинные компенсаторы — синхронные машины, предназначенные для генерирования или потребления реактивной мощности.
Электромеханические преобразователи сигналов генерируют, преобразуют и усиливают различные сигналы. Их выполняют обычно в виде электрических микромашин и широко используют в системах автоматического регулирования и управления в качестве различных датчиков, дифференцирующих и интегрирующих элементов, сравнивающих и регулирующих органов и др.
Электрические машины по роду тока делят на машины переменного и постоянного тока. В машинах переменного тока основной процесс преобразования энергии обусловлен потреблением или генерированием переменного тока. В машинах постоянного тока основной процесс преобразования энергии обусловлен потреблением или генерированием только постоянного тока.
Машины переменного тока в зависимости от принципа действия подразделяют на коллекторные и бссколлскторпыс машины, которые в свою очередь разделяются на асинхронные и синхронные. Асинхронные и синхронные электрические машины обладают свойством под названием обратимость, т.с. они могут работать как в двигательном режиме, так и в генераторном.
Асинхронные машины — это, главным образом, электрические двигатели. Простота устройства и высокая надежность позволяют применять их в различных отраслях техники для привода станков, грузоподъемных и землеройных машин, компрессоров, вентиляторов и пр. В системах автоматического регулирования широко используют управляемые асинхронные двигатели, асинхронные тахогенераторы, а также сельсины.
Синхронные машины — это генераторы переменного тока промышленной частоты на электрических станциях, генераторы повышенной частоты в автономных источниках питания, синхронные электродвигатели в электрических приводах большой мощности. В промышленной электронике широко используют различные синхронные машины малой мощности.
Коллекторные машины — электрические машины, у которых хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором. Это главным образом электродвигатели постоянного тока. В устройствах автоматики и в электробытовых приборах применяют универсальные коллекторные двигатели небольшой мощности, работающие как на постоянном, так и на переменном токе.
Машины постоянного тока — электрические машины, основной процесс преобразования энергии в которых обусловлен потреблением или генерированием только постоянного электрического тока. Это генераторы и электродвигатели, применяемые в разнообразных устройствах, требующих регулирования частоты вращения в широких пределах, а также в тех случаях, когда источниками электрической энергии для питания электродвигателей служат аккумуляторные батареи.
В промышленной электронике машины постоянного тока широко используют в качестве элсктромашинных усилителей, силовых микродвигателей, исполнительных двигателей, тахогенераторов.
Силовые микродвигатели приводят во вращение различные механизмы автоматических устройств, самопишущих приборов и пр.
Управляемые двигатели — электродвигатели с малым динамическим моментом инерции ротора, частота вращения или положения ротора которого определяется параметрами сигнала управления
Тахогенераторы — информационные электрические машины, предназначенные для выработки электрических сигналов, пропорциональных частоте вращения.
По мощности электрические машины условно разделяют на микромашины (мощностью от долей ватта до 500 ватт), лшгшм малой (от 0,5 до 10 кВт), средней (от 10 до нескольких сотен киловатт) и большой (свыше нескольких сотен киловатт) мощности.
В зависимости от частоты вращения машины условно разделяют на тихоходные (до 300 об/мин), средней быстроходности (300 / 1500 об/мин), быстроходные (1500 / 6000 об/мин) и сверхбыстроходные (свыше 6000 об/мин).
Преобразование энергии в электрических машинах
При работе ЭМ в режиме генера тора механическая энергия преобразуется в электрическую. Это происходит в соответствии с законом электромагнитной индукции, устанавливающим количественную связь индуцированной ЭДС со скоростью изменении магнитного потока. Согласно этому закону, в проводнике длиной  движущемся со скоростью v в магнитном поле перпендикулярно вектору магнитной индукции В, индуцируется ЭДС
движущемся со скоростью v в магнитном поле перпендикулярно вектору магнитной индукции В, индуцируется ЭДС

ЭДС будет постоянной, если индукция магнитного ноля постоянна, или переменной, если она изменяется в пространстве или времени. Таким образом, в этом случае проводник в магнитном поле можно рассматривать как элементарный генератор.
При работе ЭМ в режиме электродвигателя электрическая энергия преобразуется в механическую. Это происходит в соответствии с законом Ампера, согласно которому на проводник длиной  с током
с током  , помещенный в однородное магнитное поле с индукцией В, действует сила, пропорциональная силе тока и индукции магнитного поля:
, помещенный в однородное магнитное поле с индукцией В, действует сила, пропорциональная силе тока и индукции магнитного поля:

где  — угол между векторами магнитной индукции и тока.
— угол между векторами магнитной индукции и тока.
Сила F максимальна когда проводник с током расположен перпендикулярно линиям магнитной индукции. В этом случае  .
.
Пол действием этой силы проводник начнет передвигаться в магнитном поле со скоростью v. Таким образом, электрическая энергия, поступающая в проводник и создающая в нем ток, преобразуется в механическую и, следовательно, проводник с током, помещенный в магнитное поле, можно рассматривать как элементарный электродвигатель.
Рассмотренные процессы преобразования электрической энергии в механическую и механической энергии в электрическую, позволяют сделать вывод: необходимым условием работы электрической машины является наличие проводников и магнитного поля, имеющих возможность перемещаться друг относительно друга. Иначе говоря, ЭМ должна содержать часть, создающую магнитное поле, и часть, представляющую собой в общем случае совокупность проводников, пересекающих линии магнитного поля.
Электрические машины состоят из двух частей. Часть ЭМ, которая включает неподвижный магнитопровд с обмоткой, называют статором. Ротором называют вращающуюся часть ЭМ. Статор и ротор выполняются из ферромагнитного материала. Они образуют магнитопровод с необходимым воздушным зазором.
На статоре и роторе размещены обмотки. Обмотка, предназначенная для создания магнитного поля возбуждения, называется обмоткой возбуждения. Рабочей обмоткой называется обмотка, в которой индуцируется ЭДС и создастся рабочий ток.
Характеристики электрических машин
Свойства электрических машин описываются математическими формулами и уравнениями, многие из которых можно представить в виде графически выраженных функциональных зависимостей, построенных в системе координат видау =/(х). Такие графики принято называть характеристиками.
Для электрических генераторов основными характеристиками являются:
- внешняя характеристика — зависимость напряжения на обмотке якоря электромашинного генератора от тока нагрузки в заданных условиях при номинальной частоте вращения и неизменных внешних сопротивлениях в цепях обмоток возбуждения;
- характеристика холостого хода — зависимость электродвижущей силы обмотки якоря вращающегося электромашинного генератора от тока возбуждения при разомкнутой обмотке якоря и при заданной частоте вращения;
- регулировочная характеристика — зависимость тока в обмотке независимого возбуждения или тока в обмотке параллельного возбуждения от тока нагрузки при неизменном напряжении на выводах обмотки якоря и номинальной частоте вращения ротора электромашинного генератора;
- рабочие характеристики — зависимости генерируемой мощности, тока в обмотке якоря, напряжения на выводах обмотки якоря, коэффициента полезного действия и коэффициента мощности электромашинного генератора от полезной мощности на валу при неизменных частоте вращения и токе возбуждения.
Для электрических двигателей основными характеристиками являются:
- механическая характеристика — зависимость вращающего момента от частоты вращения ротора вращающегося электродвигателя при неизменных напряжении, частоте тока питающей сети и внешних сопротивлениях в цепях обмоток двигателя;
- рабочие характеристики — зависимость частоты вращения ротора
 , полезного момента на валу М, тока статора коэффициента мощности и КПД от полезной мощности двигателя Р2.
, полезного момента на валу М, тока статора коэффициента мощности и КПД от полезной мощности двигателя Р2.
 , полезного момента на валу М, тока статора
, полезного момента на валу М, тока статора  коэффициента мощности
коэффициента мощности  и КПД
и КПД  от полезной мощности двигателя Р2.
от полезной мощности двигателя Р2.Электрические машины переменного тока
В основе работы машин переменного тока лежит образование вращающегося магнитного поля. Часть машины, которая предназначена для создания магнитного поля, принято называть индуктором, а часть, в которой индуцируется ЭДС и протекает ток нагрузки — якорем.
Вращающееся магнитное поле
Магнитное поле, вектор магнитной индукции которого вращается в пространстве, называется вращающимся. Вращающееся магнитное поле, у которого вектор магнитной индукции не изменяется по величине и вращается в пространстве с постоянной угловой скоростью, называется круговым.
Для создания кругового вращающегося поля с помощью неподвижных катушек необходимо выполнение двух условий:
- оси катушек должны быть сдвинуты в пространстве друг относительно друга на определенный угол;
- токи, питающие катушки, должны быть сдвинуты по фазе соответственно пространственному смещению катушек.
Магнитное поле катушки с синусоидальным током. Если по катушке пропускать постоянный ток, то вдоль се оси создастся постоянное магнитное поле. Для определения направления магнитного поля пользуются правилом правой руки: если обхватить катушку ладонью правой руки, направив четыре пальца по току в витках, то отставленный большой палец укажет направление магнитной индукции В внутри катушки (рис. 7.1).
 Рис. 7.1. Магнитное поле катушки с постоянным током
Рис. 7.1. Магнитное поле катушки с постоянным током
При пропускании по катушке синусоидального тока  максимальная индукция тоже будет синусоидальной функцией времени
максимальная индукция тоже будет синусоидальной функцией времени 
 t. Ориентация вектора магнитной индукции в пространстве зависит направления тока в ней. Так для случая, показанного на рис. 7.2, вектор магнитной индукции направлен по оси катушки вверх. Через полпериода, когда ток изменит свой знак на противоположный, вектор магнитной индукции при той же абсолютной величине поменяет свою ориентацию в пространстве на 180°.
t. Ориентация вектора магнитной индукции в пространстве зависит направления тока в ней. Так для случая, показанного на рис. 7.2, вектор магнитной индукции направлен по оси катушки вверх. Через полпериода, когда ток изменит свой знак на противоположный, вектор магнитной индукции при той же абсолютной величине поменяет свою ориентацию в пространстве на 180°.
Таким образом, при пропускании по обмотке катушки синусоидального тока возникает пульсирующее магнитное поле, вектор индукции которого изменяется (пульсирует) вдоль этой катушки также по синусоидальному закону
 Рис. 7.2. Магнитное поле катушки с синусоидальным током
Рис. 7.2. Магнитное поле катушки с синусоидальным током
Двухфазное круговое вращающееся магнитное ноле. Круговое вращающееся магнитное ноле можно получить с помощью двух одинаковых катушек, если их оси сдвинуты в пространстве друг относительно друга на угол 90° (рис. 7.3,а).
Для питания этих катушек нужны два синусоидальных тока 
 одинаковой частоты, но сдвинутые по фазе один относительно другого на 90°. При пропускании через катушки А и В этих токов каждая из них будет создавать пульсирующее магнитное поле. Векторы магнитной индукции
одинаковой частоты, но сдвинутые по фазе один относительно другого на 90°. При пропускании через катушки А и В этих токов каждая из них будет создавать пульсирующее магнитное поле. Векторы магнитной индукции  , характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону
, характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону  . Так как направления магнитных полей катушек взаимно перпендикулярны (рис. 7.3,6), то результирующая магнитная индукция
. Так как направления магнитных полей катушек взаимно перпендикулярны (рис. 7.3,6), то результирующая магнитная индукция

 Рис. 7.3. Образование вращающегося магнитного поля с помощью двух катушек
Рис. 7.3. Образование вращающегося магнитного поля с помощью двух катушек
Вектор индукции результирующего магнитного поля  образует с вектором индукции
образует с вектором индукции  магнитного поля катушки А угол
магнитного поля катушки А угол 
 . Таким образом, вектор магнитной индукции В результирующего магнитного поля системы из двух взаимно перпендикулярных катушек вращается с постоянной угловой скоростью
. Таким образом, вектор магнитной индукции В результирующего магнитного поля системы из двух взаимно перпендикулярных катушек вращается с постоянной угловой скоростью  . Такое вращающееся магнитное поле получило название двухфазного вращающегося поля.
. Такое вращающееся магнитное поле получило название двухфазного вращающегося поля.
Так как вектор магнитной индукции нс изменяется по величине и вращается с постоянной угловой скоростью, двухфазное вращающееся поле является круговым.
В системе катушек, имеющей одну пару полюсов  (рис. 7.3), вращающееся магнитное поле делает полный оборот за время одного периода
(рис. 7.3), вращающееся магнитное поле делает полный оборот за время одного периода 
 . При частоте переменного тока
. При частоте переменного тока  Гц частота вращения поля
Гц частота вращения поля  50 Гц.
50 Гц.
Частота вращения магнитного поля зависит не только от частоты  но и от числа пар полюсов р
но и от числа пар полюсов р

При анализе работы электрических машин переменного тока часто используют понятие скорости вращения магнитного поля 

Асинхронные двигатели
Асинхронные двигатели являются основными преобразователями электрической энергии в механическую. В настоящее время они составляют основу привода большинства механизмов, используемых в различных областях человеческой деятельности. Широкое применение асинхронных двигателей объясняется их достоинствами по сравнению с другими двигателями: высокая надёжность, возможность работы непосредственно от сети переменного тока, простота обслуживания, низкая стоимость.
К недостаткам АД можно отнести большие габариты и массу двигателя, большой пусковой ток, плохая управляемость электронными схемами, низкий КПД.
Устройство и принцип работы
Как и любая машина переменного тока асинхронный двигатель (АД) состоит из разделенных воздушным зазором неподвижной части — статора и подвижной части — ротора.
В зависимости от числа питающих фаз различают трехфазные и однофазные АД. Па практике применяются преимущественно трехфазные двигатели. Однофазные двигатели имеют ограниченное применение
Статор (рис. 7.4) трехфазного АД состоит из станины, в которую впрессовывают так называемое электромагнитное ядро статора, включающее магнитопровод и трехфазную распределенную обмотку статора. Магнитопровод статора перемагничивается в процессе работы АД, поэтому для минимизации магнитных потерь его изготавливают из тонких изолированных друг от друга изоляционным лаком пластин, штампованных из специальной электротехнической стали.
Назначение статора асинхронного двигателя — создание трехфазного кругового вращающегося магнитного поля. Такое магнитное поле можно получить с помощью трех одинаковых катушек, если:
- оси катушек сдвинуты в пространстве друг относительно друга на угол 120°;
- для питания этих катушек используются три синусоидальных тока одинаковой частоты, но сдвинутые относительно друг друга но фазе соответственно пространственному смещению катушек.
Поэтому в пазах магнитопровода статора размещают трехфазную обмотку, в простейшем случае состоящую из трех фазных обмоток (фаз), оси которых сдвинуты в пространстве друг относительно друга на угол 120°. Фазы статора могут быть соединены по схеме звезда или треугольник.
На рис. 7.5,a начала фаз, условно изображенных в виде одного витка, обозначены А, В, С, а концы — X,Y,Z. Пусть фазы статора соединены по схеме звезда и подключены к симметричной трехфазной сети, создающей в них симметричную трехфазную систему токов (рис. 7.4,б)

 Рис. 7.4. Конструкция (а) и схема включения статорных и роторных обмоток (б) трехфазного асинхронного двигателя с фазным ротором
Рис. 7.4. Конструкция (а) и схема включения статорных и роторных обмоток (б) трехфазного асинхронного двигателя с фазным ротором
При появлении в них тока фазы создают магнитные поля

Направления векторов индукции этих магнитных нолей, создаваемых каждой фазой статора вдоль своей оси, показаны на рис. 7.5,а. Их сумма образует магнитную индукцию статора.
 Рис. 7.5. Направление векторов магнитной индукции (а), временная диаграмма токов (б), образование вращающегося магнитного поля с помощью двух катушек
Рис. 7.5. Направление векторов магнитной индукции (а), временная диаграмма токов (б), образование вращающегося магнитного поля с помощью двух катушек
Для нахождения магнитной индукции статора найдем се составляющие по двум взаимно перпендикулярным осям х и у, причем оси х дадим направление оси фазы А (рис. 7.5,а).
Составляющая индукции магнитного поля статора вдоль оси х равна алгебраической сумме проекций на эту ось мгновенных значений индукций магнитных полей, создаваемых фазами статора:

Подставив значения индукций из (7.7), получим

Составляющая индукции магнитного поля статора вдоль оси у

После подстановки значения индукций из (7.7), получим

Магнитная индукция поля статора

т.е. ее значение постоянно.
Вектор индукции результирующего магнитного поля  образует с осью у (рис. 7.5/?) угол
образует с осью у (рис. 7.5/?) угол  .
.
Следовательно, магнитное поле статора вращается в плоскости осей катушек по направлению движения часовой стрелки с угловой скоростью  .
.
Направление вращения результирующего магнитного поля совпадает с чередованием тока в фазах статора. Для изменения направления вращения магнитного поля достаточно поменять местами подключение проводов, подводящих ток из трехфазпой сети к любым двум фазам.
В этом случае вращающееся магнитное поле, возбуждаемое токами трехфазной системы, имеет только два полюса (р = 1). Как было отмечено раньше, при частоте переменного тока f= 50 Гц частота вращения такого поля  Гц.
Гц.
В общем виде частота вращения магнитного поля выражается формулой  . Отсюда следует, что для уменьшения частоты вращения магнитного поля необходимо выполнить обмотку статора многополюсной (р > 1). Число полюсов удваивается, если в пазах статора трехфазного двигателя размещены шесть катушек — по две в каждой фазе статора. При этом две фазные катушки обычно соединяются между собой последовательно. При необходимости создания вращающегося магнитного поля с р парами полюсов статора трехфазного двигателя должен иметь 3 р катушек.
. Отсюда следует, что для уменьшения частоты вращения магнитного поля необходимо выполнить обмотку статора многополюсной (р > 1). Число полюсов удваивается, если в пазах статора трехфазного двигателя размещены шесть катушек — по две в каждой фазе статора. При этом две фазные катушки обычно соединяются между собой последовательно. При необходимости создания вращающегося магнитного поля с р парами полюсов статора трехфазного двигателя должен иметь 3 р катушек.
Магпитопровод ротора выполняется аналогично магнитопроводу статора — из изолированных друг от друга изоляционным лаком пластин электротехнической стали. На внешней цилиндрической поверхности ротора имеются пазы, в которых размещаются проводники обмотки ротора. В зависимости от типа этой обмотки различают АД с короткозамкнутым ротором и с фазным ротором.
Наибольшее применение получила короткозамкнутая обмотка ротора, часто называемая «беличья клетка». Она состоит из медных (алюминиевых) стержней, замкнутых накоротко с торцов двумя кольцами (рис. 7.6, a). Стержни этой обмотки вставляют в пазы сердечника ротор.
У двигателей с фазным ротором (рис.7.6,б) в пазах ротора размещают трехфазную изолированную обмотку, подобную обмотке статора. Фазы обмотки (фазы) ротора соединяют звездой. Концы фаз ротора соединяют вместе и изолируют. Начала фаз подключают к трем контактным кольцам, расположенным на валу двигателя. На контактные кольца, изолированные друг от друга и от вала двигателя и вращающиеся вместе с ротором, накладываются неподвижные щетки, к которым присоединяют внешние цепи. Это позволяет, изменяя сопротивление ротора, регулировать скорость вращения двигателя и ограничивать пусковые токи. На рис. 7.7 приведено условное обозначение АД с короткозамкнутым (я) и фазным (б) ротором.
 Рис. 7.6. Короткозамкнутая обмотка ротора (а) и фазный ротор (б)
Рис. 7.6. Короткозамкнутая обмотка ротора (а) и фазный ротор (б)
Вращающееся магнитное поле, возбуждаемое при прохождении токов трехфазной системы в фазах статора асинхронного двигателя, наводит в проводниках фаз фазного ротора переменную ЭДС, частота которой  равна частоте тока
равна частоте тока  в обмотке статора. ЭДС, индуцируемая в фазе обмотки неподвижного ротора,
в обмотке статора. ЭДС, индуцируемая в фазе обмотки неподвижного ротора,

где 
обмоточный коэффициент, — частота тока в обмотке статора,  — число витков обмотки фазы ротора,
— число витков обмотки фазы ротора,  ; — максимальное значение магнитного потока статора.
; — максимальное значение магнитного потока статора.

Под действием э. д. с  в обмотке неподвижного ротора будет протекать ток
в обмотке неподвижного ротора будет протекать ток

где  — полное сопротивление фазы неподвижного ротора,
— полное сопротивление фазы неподвижного ротора,  — активное сопротивление фазы ротора,
— активное сопротивление фазы ротора,  — индуктивное сопротивление рассеяния фазы неподвижного ротора,
— индуктивное сопротивление рассеяния фазы неподвижного ротора,  — индуктивность рассеяния фазы ротора.
— индуктивность рассеяния фазы ротора.
Так как полное сопротивление фазы ротора имеет индуктивную составляющую  , то ток
, то ток  отстает по фазе от
отстает по фазе от  на угол
на угол

В момент пуска, когда ротор еще неподвижен, частота тока в обмотке ротора наибольшая  и поэтому индуктивное сопротивление
и поэтому индуктивное сопротивление  имеет наибольшее значение. Так как э. д. с.
имеет наибольшее значение. Так как э. д. с.  , индуктированная в обмотке ротора в момент пуска, имеет максимальное значение, то ток в обмотке ротора
, индуктированная в обмотке ротора в момент пуска, имеет максимальное значение, то ток в обмотке ротора  в этот момент превышает величину номинального тока двигателя в 2—7 раз.
в этот момент превышает величину номинального тока двигателя в 2—7 раз.
Взаимодействие этого тока с полем статора создаст электромагнитные силы F, приложенные к отдельным проводникам обмотки ротора. Совокупность этих сил создает на роторе вращающий электромагнитный момент  , приводящий его в движение с частотой вращения
, приводящий его в движение с частотой вращения  в направлении вращения магнитного поля статора. Следовательно, принцип работы АД основан на использовании взаимодействия вращающегося магнитного поля статора с током, наведенным этим полем в обмотке ротора.
в направлении вращения магнитного поля статора. Следовательно, принцип работы АД основан на использовании взаимодействия вращающегося магнитного поля статора с током, наведенным этим полем в обмотке ротора.
Частота вращения ротора АД всегда меньше частоты вращения магнитного поля статора  . Именно поэтому такой двигатель называют асинхронным. Относительную разность частот вращения магнитного поля и ротора
. Именно поэтому такой двигатель называют асинхронным. Относительную разность частот вращения магнитного поля и ротора  принято характеризовать безразмерной величиной
принято характеризовать безразмерной величиной 
 называемой скольжением.
называемой скольжением.
Скольжение зависит от нагрузки двигателя. При номинальной нагрузке величина скольжения обычно составляет 0,01…0,06. В режиме холостого хода, когда ротор нс испытывает противодействующих моментов,  , а в режиме короткого замыкания или пуска
, а в режиме короткого замыкания или пуска  .
.
Из последнего равенства находим  . После преобразования получим выражение:
. После преобразования получим выражение:

из которого следует, что частота вращения ротора АД зависит от скольжения и, следовательно, через скольжение выражаются ЭДС и ток ротора, вращательный электромагнитный момент двигателя и механический момент, развиваемый АД на валу.
При неподвижном роторе частота индуцируемой в его обмотке ЭДС равна частоте сети. По мере раскручивания ротора скорость  пересечения витков обмотки вращающимся магнитным полем уменьшается и, следовательно, уменьшается частота ЭДС в обмотке ротора:
пересечения витков обмотки вращающимся магнитным полем уменьшается и, следовательно, уменьшается частота ЭДС в обмотке ротора:

Таким образом, частота ЭДС в обмотке ротора прямо пропорциональна скольжению и выражение для ЭДС, индуцируемой в фазе обмотки ротора (7.11), в общем случае имеет вид:

Из (7.16) следует, что ЭДС, индуцируемой в фазе обмотки ротора пропорциональна скольжению двигателя.
Индуктивное сопротивление рассеяния фазы ротора в общем случае  С учетом полученного выражения и выражений (7.12) и (7.15) ток ротора в общем случае
С учетом полученного выражения и выражений (7.12) и (7.15) ток ротора в общем случае

Для определения сдвига фаз межу током и ЭДС ротора можно воспользоваться формулой

Возможно эта страница вам будет полезна:
Потери энергии и коэффициент полезного действия
При работе АД происходит необратимый процесс преобразования электрической энергии переменного тока сети в механическую энергию вращающегося вала. Этот процесс сопровождается бесполезными потерями энергии. Эти потери в основном состоят из:
- так называемых потерь в меди — электрических потерь, обусловленных нагревом проводников обмоток статора и ротора;
- так называемых потерь в стали — магнитных потерь от гистерезиса и вихревых токов в стали статора и ротора;
- механических потерь на трение в подшипниках и о воздух.
Трехфазный АД потребляет из сети активную мощность

где  — фазное напряжение обмотки,
— фазное напряжение обмотки,  — ток статора (фазный ток),
— ток статора (фазный ток),  — угол сдвига между фазным напряжением и фазным током. Основная часть мощности
— угол сдвига между фазным напряжением и фазным током. Основная часть мощности  (за вычетом потерь в статоре) вращающимся магнитным полем передастся в ротор в виде электромагнитной мощности:
(за вычетом потерь в статоре) вращающимся магнитным полем передастся в ротор в виде электромагнитной мощности:

где  — мощность электрических потерь в активном сопротивлении
— мощность электрических потерь в активном сопротивлении  обмотки статора,
обмотки статора,  — мощность потерь из-за гистерезиса и вихревых токов в стали статора.
— мощность потерь из-за гистерезиса и вихревых токов в стали статора.
Электромагнитная мощность может быть выражена через вращающий электромагнитный момент двигателя  , действующий на ротор со стороны вращающегося магнитного поля и приводящий его в движение с частотой вращения
, действующий на ротор со стороны вращающегося магнитного поля и приводящий его в движение с частотой вращения 

где  — угловая скорость вращения магнитного поля,
— угловая скорость вращения магнитного поля,  — число пар полюсов.
— число пар полюсов.
Аналогичным образом можно выразить механическую мощность вращающегося с частотой вращения п2 ротора:

где  — угловая скорость вращения ротора.
— угловая скорость вращения ротора.
В роторе, так же как и в статоре, имеются электрические потери в обмотке и магнитные потери в стали ротора. Мощность электрических потерь в активном сопротивлении  обмотки ротора
обмотки ротора  — число фаз ротора, в случае короткозамкнутого ротора
— число фаз ротора, в случае короткозамкнутого ротора  — число стержней обмотки, деленное на два. Мощность магнитных потерь
— число стержней обмотки, деленное на два. Мощность магнитных потерь  из-за гистерезиса и вихревых токов в стали ротора незначительна и практического значения не имеет. Поэтому можно считать, что
из-за гистерезиса и вихревых токов в стали ротора незначительна и практического значения не имеет. Поэтому можно считать, что  .
.
Разность  определяет мощность электрических потерь в роторе:
определяет мощность электрических потерь в роторе:

где  — скольжение.
— скольжение.
Таким образом, мощность электрических потерь в роторе пропорциональна скольжению. Поэтому работа АД наиболее экономична при номинальных режимах, когда скольжение составляет сотые доли единиц.
Полезная механическая мощность  на валу АД меньше развиваемой ротором механической мощности па величину механических потерь
на валу АД меньше развиваемой ротором механической мощности па величину механических потерь  , обусловленных силами трения в подшипниках и трением ротора о воздух, а также па значение добавочных потерь
, обусловленных силами трения в подшипниках и трением ротора о воздух, а также па значение добавочных потерь  .
.
Отношение полезной механической мощности  , развиваемой двигателем па валу, к активной мощности
, развиваемой двигателем па валу, к активной мощности  потребления электрической энергии из сети называется коэффициентом полезного действия двигателя:
потребления электрической энергии из сети называется коэффициентом полезного действия двигателя:

КПД современных трехфазпых АД при номинальном режиме работы составляет 0.85 — 0.95.
Наряду с необратимым процессом преобразования электроэнергии, учитываемым величиной активной мощности в АД происходит обратимый процесс обмена энергией между магнитными полем двигателя и источником электроэнергии, характеризуемый реактивной мощностью Q.
Соотношение между активной и реактивной мощностями определяется коэффициентом мощности:

При постоянных значениях фазных напряжения Ь\ и тока Ц магнитный поток вращающего поля АД также постоянен и не зависит от нагрузки. Следовательно, запасаемая в магнитном поле энергия и реактивная мощность постоянны и не зависят от нагрузки. Но так как с ростом нафузки активная мощность АД увеличивается, то с ростом нафузки увеличивается и коэффициент мощности двигателя.
Механическая характеристика АД
Электромагнитный момент возникает при наличии магнитного поля, создаваемого обмоткой статора, и тока в обмотке ротора. Можно показать, что электромагнитный момент определяется соотношением:

где  — конструктивный коэффициент,
— конструктивный коэффициент,  — угловая скорость вращения магнитного поля,
— угловая скорость вращения магнитного поля,  — сдвиг фаз ЭДС и тока ротора,
— сдвиг фаз ЭДС и тока ротора,  — активная составляющая тока ротора, Ф — результирующий магнитный поток. Таким образом, величина электромагнитного момента зависит от результирующего магнитного поля Ф и активной составляющей тока ротора.
— активная составляющая тока ротора, Ф — результирующий магнитный поток. Таким образом, величина электромагнитного момента зависит от результирующего магнитного поля Ф и активной составляющей тока ротора.
Вращающий момент, развиваемый на валу двигателя, меньше электромагнитного момента на значение момента трения, обусловленного силами трения в подшипниках ротора и трением ротора о воздух. При практических расчетах моментом трения, который для асинхронных двигателей особенно средней и большой мощности относительно мал, пренебрегают и вращающий момент

Подставим в полученное выражение значения  (7.17) и
(7.17) и  (7.18):
(7.18):

Полученное выражение используется для построения механических характеристик. Задаваясь значениями  при известных параметрах двигателя можно определить М и построить искомую механическую характеристику.
при известных параметрах двигателя можно определить М и построить искомую механическую характеристику.
В электромеханике механическую характеристику (рис. 7.8, а) часто показывают как зависимость  . В теории электропривода широко используют зависимость (рис. 7.8, 6)
. В теории электропривода широко используют зависимость (рис. 7.8, 6) 
 Рис. 7.8. Механические характеристики асинхронной машины
Рис. 7.8. Механические характеристики асинхронной машины
Укажем характерные точки механической характеристики асинхронной машины. При отрицательных значениях скольжения (s 
Участок a-в характеристики устойчив, т.е. при нарушении баланса вращающего М и тормозного  моментов
моментов  происходит изменение частоты вращения, приводящее к новому балансу моментов. Важным показателем механической характеристики является жесткость
происходит изменение частоты вращения, приводящее к новому балансу моментов. Важным показателем механической характеристики является жесткость  . Чем жестче (положе) рабочий участок характеристики двигателя. Тем меньше изменяется частота вращения при изменении момента нагрузки.
. Чем жестче (положе) рабочий участок характеристики двигателя. Тем меньше изменяется частота вращения при изменении момента нагрузки.
Построение механической характеристики асинхронного двигателя с использованием формулы (7.28) составляет определенные трудности, так как значения не всех используемых в формуле параметров приводятся в каталогах АД. Поэтому на практике широко используют упрощенную формулу момента, известную под названием формулы Клосса:

где критическое скольжение определяется по приближенной формуле

 — перегрузочная способность двигателя.
— перегрузочная способность двигателя.
Рабочие характеристики АД
Рабочие характеристики определяют основные эксплуатационные свойства АД. Они определяются либо расчетными, либо экспериментальными путями и строятся только для зоны устойчивой работы АД, т.е. от скольжения, равного нулю, и до скольжения, превышающего номинальное на 10-20%.
На рис. 7.10 показан примерный вид рабочих характеристик трехфазного асинхронного двигателя. Зависимость частоты вращения  имеет вид графика, слабо наклоненного к оси абсцисс, поскольку трехфазные АД работают с небольшим скольжением, которое даже при номинальной нагрузке обычно не превышает 0,05. При этом частота вращения ротора с ростом нагрузки уменьшается пропорционально величине
имеет вид графика, слабо наклоненного к оси абсцисс, поскольку трехфазные АД работают с небольшим скольжением, которое даже при номинальной нагрузке обычно не превышает 0,05. При этом частота вращения ротора с ростом нагрузки уменьшается пропорционально величине 
Вращающий момент па валу двигателя М связан с полезной мощностью  , развиваемой двигателем на валу, соотношением
, развиваемой двигателем на валу, соотношением  . Так как скорость вращения АД с увеличением нагрузки уменьшается, зависимость
. Так как скорость вращения АД с увеличением нагрузки уменьшается, зависимость  немного отклоняется вверх. Зависимость
немного отклоняется вверх. Зависимость  начинается с тока холостого хода
начинается с тока холостого хода  , который для АД составляет
, который для АД составляет  .
.
 Рис. 7.10. Рабочие характеристики асинхронного двигателя
Рис. 7.10. Рабочие характеристики асинхронного двигателя
Рабочая характеристика  выражает зависимость между развиваемой двигателем мощностью и фазовым сдвигом между током и напряжением статора. Асинхронный двигатель потребляет из сети ток
выражает зависимость между развиваемой двигателем мощностью и фазовым сдвигом между током и напряжением статора. Асинхронный двигатель потребляет из сети ток  значительно отстающий но фазе от приложенного напряжения. Так в режиме холостого хода
значительно отстающий но фазе от приложенного напряжения. Так в режиме холостого хода  . При увеличении нагрузки на валу
. При увеличении нагрузки на валу  возрастает, достигая максимального значения при
возрастает, достигая максимального значения при  .
.
Зависимость КПД  имеет вид, характерный для электрических машин: при малых нагрузках КПД небольшой, но с ростом нагрузки он резко увеличивается, достигая максимального значения примерно при нагрузках 60-85% от номинальной.
имеет вид, характерный для электрических машин: при малых нагрузках КПД небольшой, но с ростом нагрузки он резко увеличивается, достигая максимального значения примерно при нагрузках 60-85% от номинальной.
Пуск АД
Важное значение для оценки двигателей имеют их пусковые свойства. К ним предъявляются следующие требования:
- двигатель должен создавать начальный пусковой момент, превышающий статический момент сопротивления, чтобы ротор двигателя мог прийти во вращение и достичь установившейся частоты вращения;
- пусковой ток не должен достигать значений, вызывающих повреждения двигателя, и создавать в сети значительного падения напряжения, нарушающего работу других потребителей;
- схема пуска должна быть по возможности простой, экономичной, удобной в обслуживании;
- продолжительность пуска должна быть минимальной.
Различают следующие способы пуска АД: прямое включение в цепь, пуск при пониженном напряжении, реостатный пуск, использование двигателей с улучшенными пусковыми свойствами.
Прямое включение в цепь — самый простой, самый дешевый и, пожалуй, наиболее распространенный способ пуска. Он заключается в прямом подключении двигателя к питающей сети. Пуск осуществляется при полном напряжении и постоянной частоте. Электродвигатель развивает высокий пусковой момент при коротком времени разгона.
Однако при этом в момент пуска в цепи двигателя возникает большой пусковой ток, который значительно превышает номинальный. В маломощной сети этот ток может вызвать кратковременное понижение напряжения, что отражается на работе других потребителей энергии, включенных в эту сеть. Поэтому непосредственным включением в сеть запускают только двигатели малой мощности.
Пуск при пониженном напряжении применяют при пуске в ход мощных двигателей, для которых недопустимо прямое включение в сеть. Принцип пуска при пониженном напряжении заключается в подключении двигателя непосредственно к электрической питающей сети таким образом, что в момент пуска на двигатель подается пониженное напряжение. Для понижения подводимого к обмотке статора напряжения используют дроссели и понижающие автотрансформаторы. После пуска на обмотку статора подастся напряжение сети.
Понижение напряжения производят с целью уменьшения пускового тока, но так как одновременно происходит уменьшение пускового момента, этот способ пуска можно применять только в режиме холостого хода.
Реостатный пуск применяется для двигателей с фазным ротором. Для уменьшения пускового тока их пускают при помощи активных сопротивлений, включаемых в цепь ротора (рис.7.4,б).
При включении сопротивлений в цепь обмотки ротора:
- ток в этой обмотке уменьшается, следовательно, уменьшается и ток в обмотке статора, а также ток, потребляемый двигателем от сети;
- увеличивается cos
Таким образом, при включении активного сопротивления в цепь ротора не только уменьшается пусковой ток, но и увеличивается пусковой момент.
В двигателях с улучшенными пусковыми свойствами совмещены высокая надежность АД с короткозамкнутым ротором и большой пусковой момент АД с фазным ротором. Они имеют короткозамкнутую обмотку ротора специальной конструкцией. Различают двигатели с обмоткой ротора в виде двойной «беличьей клетки» (рис. 7.11 ,а) и с глубоким пазом (рис. 7.11 ,б).
У двигателя с двойной «беличьей клеткой» (рис. 7.11 ,а) на роторе закладывается две короткозамкнутые обмотки: пусковая (обмотка 1) и рабочая (обмотка 2).
Пусковая обмотка выполняется из материала с большим удельным сопротивлением (латунь), чем материал рабочей обмотки (медь). Сечение проводников, образующих пусковую обмотку, меньше, чем у рабочей обмотки. За счет этого активное сопротивление пусковой обмотки становится больше активного сопротивления рабочей обмотки, что и обеспечивает получение повышенного пускового момента.
 Рис. 7.11. Асинхронные двигатели с улучшенными пусковыми свойствами
Рис. 7.11. Асинхронные двигатели с улучшенными пусковыми свойствами
Рабочая обмотка, расположенная глубже пусковой обмотки, охватывается большим магнитным потоком, чем пусковая. Поэтому ее индуктивное сопротивление значительно больше, индуктивного сопротивления пусковой обмотки. Поэтому в момент пуска, когда частота тока ротора имеет наибольшее значение, ток в рабочей обмотке, будет небольшим, и в создании пускового момента будет участвовать в основном пусковая обмотка, имеющая большое активное сопротивление. По мере разгона двигателя частота тока ротора падает, уменьшается индуктивное сопротивление обмоток ротора, это приводит к увеличению тока в рабочей обмотке, за счет этого в создании вращающего момента будет участвовать, в основном, рабочая обмотка. Т.к. она обладает малым активным сопротивлением, механическая характеристика двигателя будет жесткой.
У двигателя с глубоким пазом (рис. 7.11,а) глубокий стержень обмотки (1) можно представить в виде нескольких проводников, расположенных по высоте паза. За счет высокой частоты тока в обмотке ротора в момент пуска в ход происходит «вытеснение тока к поверхности проводника». Поэтому в создании пускового момента участвует только верхний слой проводников обмотки ротора. Сечение верхнего слоя значительно меньше сечения всего проводника. Поэтому при пуске в ход обмотка ротора обладает повышенным активным сопротивлением, двигатель развивает повышенный пусковой момент. По мере разгона двигателя плотность тока по сечению проводников обмотки ротора выравнивается, сопротивление обмотки ротора снижается.
Двигатели с улучшенными пусковыми свойствами имеют жесткие механические характеристики, повышенный пусковой момент и меньшую кратность пускового тока, чем двигатели с короткозамкнутым ротором обычной конструкцией.
Регулирование частоты вращения АД
Одним из недостатков АД является неэкономичное регулирование частоты вращения. Из формулы

следует, что изменение частоты вращения  возможно изменением частоты
возможно изменением частоты  питающей сети, изменением числа пар полюсов
питающей сети, изменением числа пар полюсов  и изменением скольжения s. Первые два изменяют частоту вращения поля статора, а третий осуществляется изменением сопротивления в цепи ротора.
и изменением скольжения s. Первые два изменяют частоту вращения поля статора, а третий осуществляется изменением сопротивления в цепи ротора.
Изменение частоты напряжения сети. Так как частота вращения магнитного поля статора  пропорциональна частоте f напряжения питающей сети, то частоту вращения ротора можно регулировать изменением частоты напряжения сети. Для этого необходимо иметь специальный генератор трехфазного напряжения или полупроводниковый преобразователь частоты. Частотное регулирование более экономично, однако часто стоимость преобразователя частоты превышает стоимость самого двигателя.
пропорциональна частоте f напряжения питающей сети, то частоту вращения ротора можно регулировать изменением частоты напряжения сети. Для этого необходимо иметь специальный генератор трехфазного напряжения или полупроводниковый преобразователь частоты. Частотное регулирование более экономично, однако часто стоимость преобразователя частоты превышает стоимость самого двигателя.
Изменение числа нар полюсов. Число пар полюсов можно изменить либо располагая на статоре несколько (обычно две) обмоток, каждая из которых имеет разное число пар полюсов и которые включают не одновременно, либо переключая секции каждой фазной обмотки (соединяя их параллельно, последовательно, согласно или встречно). Двигатели с изменением числа пар полюсов называют многоскоростными. У них возможно только ступенчатое изменение частоты. Многоскоростные двигатели имеют большие массы и габариты, чем двигатели нормального исполнения.
Регулирование изменением скольжения может быть выполнено либо увеличением сопротивления цени ротора, либо изменением потока.
Первый способ применим лишь для АД с фазным ротором. Способы введения сопротивления  в цепь ротора такие же, как и в разделе «Пуск АД», с той разницей, что регулировочный реостат в отличие от пускового находится в работе продолжительное время и рассчитывается па большие тепловые перегрузки.
в цепь ротора такие же, как и в разделе «Пуск АД», с той разницей, что регулировочный реостат в отличие от пускового находится в работе продолжительное время и рассчитывается па большие тепловые перегрузки.
При постоянном тормозном моменте па валу двигателя и, следовательно, при постоянном вращающем моменте изменение сопротивления регулировочного реостата приводит к изменению частоты вращения двигателя. При этом частота вращения АД тем меньше, чем больше сопротивление . При  двигатель имеет максимальную частоту вращения, близкую к частоте вращения магнитного поля статора.
двигатель имеет максимальную частоту вращения, близкую к частоте вращения магнитного поля статора.
Первый способ позволяет регулировать частоту вращения в широком диапазоне (практически от  ), по не экономичен, гак как в дополнительно введенных в цепь обмотки ротора резисторах возникают большие потери от полного тока ротора.
), по не экономичен, гак как в дополнительно введенных в цепь обмотки ротора резисторах возникают большие потери от полного тока ротора.
Изменение потока АД осуществляется, например, путем изменения питающего напряжения, но возможно лишь в сторону его уменьшения. Скольжение АД при этом возрастает, но одновременно уменьшается его перегрузочная способность, поэтому возможный диапазон регулирования частоты вращения АД невелик
Способы торможения АД
Различают два вида электрического торможения: динамическое и рекуперативное.
Электрическое торможение двигателя, при котором энергия рассеивается в обмотках или в отдельном сопротивлении, называют динамическим торможением. Динамическое торможение трехфазного ЛД осуществляют отключением обмоток статора от трех фазной сети и подключением к источнику постоянного напряжения. Постоянный ток обмоток статора создает неподвижное магнитное поле, под действием которого в обмотке вращающегося по инерции ротора индуцируются токи, создающие тормозной момент.
Электрическое торможение вращающегося электродвигателя, при котором энергия отдастся| в сеть называют рекуперативным. Рекуперативное торможение характерно для ЛД, в котором путем переключения во время работы машины статорной обмотки на большее число полюсов уменьшается частота вращения магнитного поля статора. Ротор по инерции некоторое время продолжает вращаться с прежней частотой, большей, чем частота вращения поля после переключения числа полюсов обмотки. В это время машина работает в генераторном режиме и отдает электрическую энергию в сеть. При замедлении частоты вращения ротора до частоты вращения магнитного поля машина переходит в двигательный режим и работает с частотой вращения, соответствующей новому числу полюсов обмотки статора.
Возможно эта страница вам будет полезна:
Синхронные машины
Синхронной называется такая электрическая машина переменного тока, частота вращения ротора которой равна частоте вращения магнитного поля статора. Синхронные машины (СМ) могут работать в режимах генератора, двигателя и синхронного компенсатора.
Наиболее распространенный режим работы СМ — генераторный. Синхронные генераторы составляют основу электроэнергетики. Практически вся электроэнергия во всем мире вырабатывается посредством синхронных генераторов.
Синхронные двигатели (СД) применяются в электроприводах, где требуется постоянная частота вращения Преимущество синхронных двигателей перед АД — возможность работы с  и большая перегрузочная способность. Однако они имеют плохие пусковые свойства, и для питания обмотки возбуждения требуется постоянный ток. СД — это обычно двигатели большой мощности, так как именно они по своим технико-экономическим показателям превосходят двигатели других типов.
и большая перегрузочная способность. Однако они имеют плохие пусковые свойства, и для питания обмотки возбуждения требуется постоянный ток. СД — это обычно двигатели большой мощности, так как именно они по своим технико-экономическим показателям превосходят двигатели других типов.
СМ находят применение также в качестве синхронных компенсаторов -генераторов реактивной мощности.
Примеры условных обозначений СМ приведены на рис. 7.12

Рис. 7.12. Условные обозначения синхронных машин: а — с трехфазной неявнополюсной обмоткой возбуждения на роторе и с соединенной треугольником обмоткой статора; б — с трехфазной явнополюсной обмоткой возбуждения на роторе и с соединенной звездой с выведенной нейтральной (средней) точкой обмоткой статора; в — с синхронной трехфазной с возбуждением от постоянных магнитов и соединенной звездой обмоткой статора
Устройство синхронных машин
Как и асинхронные машины переменного тока, СМ состоят из статора и ротора (рис. 7.13).
Статор СМ аналогичен статору АД. Он собран из изолированных друг от друга пластин электротехнической стали. В пазах с внутренней стороны статора размешена в большинстве случаев трехфазная обмотка.
В СМ статор является якорем, т.е. той частью электрической машины, в которой индуцируется ЭДС.

Рис. 7.13. Принцип устройства явнополюсной (а) и неявнополюсной (о) синхронной машины: 1-статор; 2-ротор; 3- обмотка возбуждения
Ротор СМ представляет собой электромагнит постоянного тока, который создаст магнитное поле, вращающееся вместе с ротором. Обмотка ротора (обмотка возбуждения) подключается к внешнему источнику постоянного тока (возбудителя) посредством двух изолированных друг от друга и от вала контактных колец, насаженных на вал ротора, и неподвижных щеток, скользящих по контактным кольцам. Обмотка ротора и обмотка статора имеет одинаковое число полюсов. Ротор СМ является индуктором.
В СМ встречаются индукторы, состоящие из системы постоянных магнитов.
При вращении ротора с частотой (в оборотах в минуту) магнитный поток, создаваемый постоянным током обмотки возбуждения, пересекает проводники обмотки статора и наводит в се фазах переменную ЭДС, пропорциональную частоте вращения ротора и изменяющуюся с частотой  . Здесь р — число пар полюсов машины. Протекающий через подключенную к нагрузке трех фазную обмотку статора ток создаст вращающееся магнитное поле, частота вращения которого
. Здесь р — число пар полюсов машины. Протекающий через подключенную к нагрузке трех фазную обмотку статора ток создаст вращающееся магнитное поле, частота вращения которого 

Из полученного равенства следует: частота вращения вращающегося магнитного поля совпадает с частотой вращения ротора, т.е. они вращаются синхронно. Поэтому такие электрические машины называются синхронными.
Таким образом, ротор СМ, вращается с постоянной скоростью, равной скороти вращения магнитного поля, ЭДС в обмотке ротора не индуцируется, а магнитное поле ротора создастся постоянным током, подводимым от внешнего источника, или постоянными магнитами.
По конструкции ротора СМ подразделяют на явнополюспые (7.13,а) и неявнополюсные (7.13,6). В неявнополюсной машине обмотка возбуждения 3 уложена в выфрезерованных по всей длине цилиндрического сердечника ротора пазах.
СМ с явно выраженными полюсами обычно рассчитаны на небольшие скорости вращения. В высокоскоростных СМ применяются роторы с неявно выраженными полюсными наконечниками, так как они обладают более высокой механической прочностью по сравнению с явнополюсной конструкцией ротора.
Синхронные генераторы
Существуют однофазные и трехфазпые СГ. Трехфазные генераторы имеют более высокий, чем однофазные генераторы, КПД и меньшую стоимость. Поэтому однофазные СГ имеют ограниченное применение.
Па рис. 7.14 представлена функциональная схема трехфазного синхронного генератора. Па статоре 1 расположена трехфазная обмотка, в принципе не отличающаяся от аналогичной обмотки асинхронной машины. В простейшем случае обмотка статора трехфазного СГ состоит из трех фазных катушек (фаз), оси которых сдвинуты в пространстве по отношению друг к другу на 120°. Фазы статора можно включить звездой или треугольником.
На роторе расположен электромагнит с обмоткой возбуждения 2, получающей питание постоянным током через скользящие контакты. Они осуществляются посредством двух контактных колец, расположенных на вращающемся роторе, и двух неподвижных щеток.

Рис. 7.14. Функциональная схема синхронного генератора
Ротор генератора приводится во вращение первичным двигателем с постоянной частотой  . Ток возбуждения
. Ток возбуждения  , протекающий в обмотке возбуждения, создаст магнитное поле возбуждения, вращающееся с частотой вращения ротора .
, протекающий в обмотке возбуждения, создаст магнитное поле возбуждения, вращающееся с частотой вращения ротора .
При холостом ходе фазные обмотки статора разомкнуты и магнитное поле ротора образуется только обмоткой возбуждения ротора. Пересекая проводники фазных обмоток статора, магнитное поле ротора индуцирует в трехфазной обмотке статора переменные ЭДС  , которые будучи одинаковыми по значению и сдвинутыми по фазе относительно друг друга на 1/3 периода (120°), образуют симметричную трехфазную систему ЭДС, изменяющихся с частотой
, которые будучи одинаковыми по значению и сдвинутыми по фазе относительно друг друга на 1/3 периода (120°), образуют симметричную трехфазную систему ЭДС, изменяющихся с частотой  случае р = 1 для обеспечения
случае р = 1 для обеспечения  необходимо установить = 50Гц.
необходимо установить = 50Гц.
Для получения близкой к синусоидальной формы ЭДС необходимо, чтобы распределение магнитного потока в воздушном зазоре между статором и ротором было близким к синусоидальному. Для этого в явнополюсных СГ сердечник полюсов заканчивается полюсными наконечниками, геометрическая форма которых выбрана такой, при которой воздушный зазор между полюсным наконечником и статором под серединой полюса минимален, а у его краев максимален (рис. 7.15). При таком неравномерном зазоре кривая магнитной индукции  в воздушном зазоре максимально приближена к синусоиде, в то время как при равномерном зазоре опа имеет форму трапеции.
в воздушном зазоре максимально приближена к синусоиде, в то время как при равномерном зазоре опа имеет форму трапеции.
В неявнополюсных СГ синусоидальное распределение магнитного потока в воздушном зазоре между статором и ротором добиваются выбором размеров катушек обмотки возбуждения и соответствующим распределением обмотки по окружности сердечника ротора.

Рис. 7.15. Распределение магнитной индукции в зазоре синхронного генератора:
1 — при равномерном зазоре. 2 — при неравномерном зазоре
В режиме холостого хода действующее значение синусоидальной ЭДС, индуцируемой потоком возбуждения  в одной фазе якоря,
в одной фазе якоря, 
 — постоянные для данного СГ коэффициенты,
— постоянные для данного СГ коэффициенты,  — частота ЭДС, — частота вращения ротора. Таким образом, индуктированная в фазных обмотках статора ЭДС пропорциональна магнитному потоку машины и скорости вращения ротора.
— частота ЭДС, — частота вращения ротора. Таким образом, индуктированная в фазных обмотках статора ЭДС пропорциональна магнитному потоку машины и скорости вращения ротора.
Так как частота вращения ротора поддерживается постоянной, то  зависит только от и, следовательно, только от тока возбуждения ротора
зависит только от и, следовательно, только от тока возбуждения ротора  . Изменяя ток возбуждения , можно регулировать магнитный поток ротора
. Изменяя ток возбуждения , можно регулировать магнитный поток ротора  и пропорциональную ему ЭДС генератора. Характеристика холостого хода генератора приведена на рис. 7.16.
и пропорциональную ему ЭДС генератора. Характеристика холостого хода генератора приведена на рис. 7.16.

Puc. 7.16. Характеристика холостого хода синхронного генератора
Характеристику холостого хода снимают при постоянной номинальной скорости вращения ротора. При изменении тока возбуждения от нуля, ЭДС и поток сначала изменяются по линейному закону, а затем, при близких к номинальным значениям тока возбуждения, изменение ЭДС из-за насыщения магнитной цепи характеристика холостого хода отклоняется от линейного закона. При больших насыщениях характеристика холостого хода снова становится линейной.
При подключении к фазным обмоткам статора симметричной нагрузки в них возникают одинаковые токи, сдвинутые по фазе на угол 120°. Эти токи создают свое вращающееся магнитное поле. Скорость и направление вращения этого поля такие же, как и у поля ротора и, следовательно, магнитные потоки возбуждения и якоря  в СГ взаимно неподвижны. Они образуют результирующий вращающийся магнитный поток
в СГ взаимно неподвижны. Они образуют результирующий вращающийся магнитный поток  , который индуцирует в обмотках статора ЭДС, не равную ЭДС в режиме холостого хода.
, который индуцирует в обмотках статора ЭДС, не равную ЭДС в режиме холостого хода.
Влияние магнитного поля якоря на магнитный поток СГ называется реакцией якоря. Реакция якоря определяется не только величиной, но и характером нагрузки. При активной нагрузке ток и ЭДС в обмотках фаз генератора совпадают по фазе (угол сдвига фаз между ЭДС генератора и током якоря  = 0). При этом ток возбуждения, протекая по обмотке ротора и взаимодействуя с потоком якоря , создает силу, которая противодействует, т.е. создает тормозной момент
= 0). При этом ток возбуждения, протекая по обмотке ротора и взаимодействуя с потоком якоря , создает силу, которая противодействует, т.е. создает тормозной момент  . Таким образом, при чисто активной нагрузке реакция якоря проявляется в виде механической тормозной силы, приложенной к ротору, а величина результирующего магнитного поля не изменяется или изменяется незначительно при насыщении магнитной цепи машины.
. Таким образом, при чисто активной нагрузке реакция якоря проявляется в виде механической тормозной силы, приложенной к ротору, а величина результирующего магнитного поля не изменяется или изменяется незначительно при насыщении магнитной цепи машины.
При чисто индуктивной нагрузке ЭДС СГ опережает по фазе ток якоря на 90°, поток якоря направлен против потока ротора и, следовательно, оказывает размагничивающее действие. ЭДС СГ уменьшается. Однако механической тормозной силы, приложенной к ротору, здесь не возникает.
При чисто емкостной нагрузке ЭДС СГ отстает по фазе от тока якоря на 90°, реакция якоря оказывает намагничивающее действие. ЭДС СГ возрастает. Так же, как и в случае чисто индуктивной нагрузки, тормозного механического действия на ротор непроисходит.
На практике нагрузка генератора в большинстве случаев является активно-индуктивной и реакция якоря не только приводит к уменьшению результирующего магнитного потока, но и проявляется в виде тормозной механической силы.
Таким образом, при работе СГ пол нагрузкой ЭДС в каждой фазе обмотки статора с учетом явления реакции якоря будет несколько отличаться от ЭДС при холостом ходе. Фазное напряжение СГ, работающего под нагрузкой, заметно отличается от ЭДС генератора в режиме холостого хода.
Эксплуатационные свойства СГ в значительной степени определяются его внешними и регулировочными характеристиками. На рис.7.17 приведены внешние характеристики СГ для активной ( = 0), для активно-емкостной ( 0) нагрузок.
Из приведенных характеристик видно, что изменение величины или характера нагрузки может привести к значительному отклонению выходного напряжения генератора от его поминального значения  . Напряжение генератора при активно — индуктивной нагрузке (>0) довольно резко падает, что объясняется размагничивающим действием реакции якоря, а при активно-емкостной нагрузке (
. Напряжение генератора при активно — индуктивной нагрузке (>0) довольно резко падает, что объясняется размагничивающим действием реакции якоря, а при активно-емкостной нагрузке ( 
Рис. 7.17. Внешние характеристики синхронного генератора
Для минимизации влияния нагрузки на выходное напряжение необходимо соответствующим образом изменять ЭДС генератора, воздействуя на его ток возбуждения. Эту задачу решают специальные регуляторы тока возбуждения, которые в автоматическом режиме в соответствии с регулировочной характеристикой СГ изменяют ток возбуждения при изменении нагрузки. Регулировочные характеристики СГ для различной нагрузки приведены на рис. 7.18.

Рис. 7.18. Регулировочные характеристики синхронного генератора
Коэффициент полезного действия синхронных генераторов. Преобразование в генераторе механической энергии в электрическую сопровождается неизбежными потерями. Вее виды потерь разделяются на основные и добавочные.
Основные виды потерь:
- потери в меди , то сеть в обмотках статора и ротора;
- потери в стали статора на гистерезис и вихревые токи;
- потери на возбуждение
- механические потери — это потери на трение вращающихся частей генератора и потери на вентиляцию.
 , то сеть в обмотках статора и ротора;
, то сеть в обмотках статора и ротора; статора на гистерезис и вихревые токи;
статора на гистерезис и вихревые токи;
 — это потери на трение вращающихся частей генератора и потери на вентиляцию.
— это потери на трение вращающихся частей генератора и потери на вентиляцию.Добавочные потери при нагрузке  в синхронном генераторе определяют в процентах от полезной мощности генератора. Для синхронных машин мощностью до 1000 кВт добавочные потери при нагрузке принимают равными 0,5%, а для машин мощностью более 1000 кВт- 0,25-0,4%.
в синхронном генераторе определяют в процентах от полезной мощности генератора. Для синхронных машин мощностью до 1000 кВт добавочные потери при нагрузке принимают равными 0,5%, а для машин мощностью более 1000 кВт- 0,25-0,4%.
КПД синхронного генератора  — сумма всех потерь, Р -полезная мощность, отдаваемая СГ в нагрузку. Он лежит в пределах от 0,94 до 0,98. Более мощные генераторы имеют более высокий КПД.
— сумма всех потерь, Р -полезная мощность, отдаваемая СГ в нагрузку. Он лежит в пределах от 0,94 до 0,98. Более мощные генераторы имеют более высокий КПД.
Включение синхронных генераторов на параллельную работу. Большая надежность энергоснабжения потребителей в современных энергосистемах обеспечивается параллельной работой на общую сеть целого ряда электростанций при одновременной работе на каждой электростанции нескольких генераторов.
Синхронный трехфазный генератор можно включать на параллельную работу’ в общей сети, если выполнены следующие условия:
- действующие значения фазных напряжений включаемого генератора должны быть равны действующим значениям фазных напряжений сети;
- напряжения генератора и сети должны совпадать по фазе;
- частота напряжений генератора должна быть равна частоте напряжений в сети;
- включаемый генератор и сеть должны иметь одинаковый порядок чередования фаз.
Поэтому перед включением генератора в сеть необходимо отрегулировать соответствующим образом режим работы генератора на холостом ходу. Совокупность этих операций называется синхронизацией генератора.
Равенство напряжений обеспечивается регулированием тока возбуждения генератора.
Изменение частоты и фазы напряжения генератора достигается изменением скорости вращения генератора.
Порядок чередования фаз устанавливается в процессе монтажа генератора и правильность чередования фаз проверяется при первом его включении.
Неправильная синхронизация при подключении генератора может привести к аварийной ситуации.
Синхронные режимы параллельной работы синхронных машин. Режим работы синхронной машины параллельно с сетью при синхронной скорости называется синхронным.
Если при включении СГ на параллельную работу ранее изложенные условия синхронизации соблюдены в точности, напряжение параллельно работающего генератора равно напряжению сети на зажимах генератора и токи в обмотках статора будут равны нулю. Синхронная машина не отдаст энергию в сеть и не потребляет ее из сети.
При увеличении после синхронизации СГ тока возбуждения (перевозбуждение генератора) его напряжение становится больше напряжения сети. Между сетью и статором появится уравнительный ток, отстающий по фазе от напряжения генератора на 90°. В результате действия реакции якоря этот индуктивный ток размагничивает машину и сохраняет неизменным результирующий магнитный поток. Генератор отдаст в сеть реактивную мощность QL. С точки зрения воздействия на сеть генерирование реактивной мощности равносильно потреблению из сети емкостного тока, т.е. перевозбуждённый синхронный генератор подобен конденсатору.
При уменьшении тока возбуждения (недовозбуждение генератора) напряжение генератора становится меньше напряжения сети. И в этом случае между сетью и генератором возникает ток, но, в отличие от предыдущего случая, он опережает по фазе напряжение генератора на 90°. Этот емкостной ток окажет на магнитную систему генератора намагничивающее действие. Изменение фазы тока на 180° по сравнению с предыдущим случаем означает, что генератор теперь потребляет из сети реактивную мощность, т.е. влияние на сеть недовозбужденного генератора подобно действию индуктивности.
В обоих случаях угол сдвига фаз между током и ЭДС равен 90°, поэтому активная мощность равна нулю. Следовательно, изменением тока возбуждения можно регулировать только реактивную мощность синхронного генератора, но нельзя нагрузить его активной мощностью.
Синхронная машина, не несущая активной нагрузки и загруженная реактивным током, называется синхронным компенсатором.
Для того чтобы включенная на параллельную работу синхронная машина приняла на себя активную нагрузку и работала в режиме генератора, необходимо увеличить движущий механический момент на валу.
Если, наоборот, притормозить ротор синхронной машины, создав на его валу механическую нагрузку, машина будет работать в режиме двигателя, потребляя активную мощность из сети.
Возможно эта страница вам будет полезна:
Синхронные двигатели
Синхронные машины обратимы и могут работать как в режиме генератора, так и в режиме двигателя. В режиме генератора синхронная машина получает на валу механическую энергию, а отдаст в сеть электрическую.
В режиме двигателя при подключении обмотки статора к сети ток, протекающий по обмотке, создаст вращающееся магнитное поле. В результате его взаимодействия с током ротора возникает вращающий электромагнитный момент, под воздействием которого ротор вращается с частотой, равной частоте вращающегося магнитного поля. Таким образом, в этом режиме синхронная машина получает из сети электрическую энергию, а отдаст на валу механическую.
Преимущества СД по сравнению с АД:
- благодаря возбуждению постоянным током, могут работать при и не потреблять при этом реактивной мощности из сети;
- постоянная частота вращения, не зависящая от нагрузки;
- при работе с перевозбуждением отдают реактивную мощность в сеть, что улучшает коэффициент мощности сети;
- при понижении напряжения сохраняет большую нагрузочную способность;
- КПД выше, так как добавочные потери в стали ротора меньше, чем у АД.
- конструкция СД сложнее, чем у АД с короткозамкнутым ротором;
- в большинстве случаев дороже АД с короткозамкнутым ротором;
- пуск и регулирование скорости сложнее.
При мощности  кВт СД целесообразно применять, если не требуется частых пусков, остановок и регулирования скорости. СД с
кВт СД целесообразно применять, если не требуется частых пусков, остановок и регулирования скорости. СД с  по своей стоимости и потерям всегда имеют преимущества перед АД, снабженным конденсаторными батареями для приведения коэффициента мощности .
по своей стоимости и потерям всегда имеют преимущества перед АД, снабженным конденсаторными батареями для приведения коэффициента мощности .
Синхронные компенсаторы
Как уже указывалось, синхронный компенсатор — это синхронная машина, не несущая активной нагрузки и загруженная реактивным током. Синхронные компенсаторы используются для повышения коэффициента мощности и поддержания нормального напряжения в сети.
Необходимую при работе некоторых потребителей (например, асинхронных двигателей) реактивную мощность вырабатывает перевозбужденный синхронный компенсатор, установленный в непосредственной близости к потребителю и являющийся источником реактивной мощности, а не СГ сети. В результате синхронные генераторы электростанций сети будут полностью (или частично) разгружены от реактивной мощности, КПД генераторов и сети повысится, потери мощности и падения напряжения в них уменьшатся.
Синхронные компенсаторы применяют также для стабилизации напряжения в сети при передаче энергии по линиям большой протяженности. При больших индуктивных нагрузках напряжение у потребителей оказывается намного меньше, чем на входе линии. При малых нагрузках емкостное сопротивление линии электропередачи может вызвать возрастание напряжения в конце линии по сравнению с напряжением в ее начале. Включенный в конце линии электропередачи синхронный компенсатор, работающий при больших нагрузках с перевозбуждением, а при малых нагрузках с педовозбужде-пием, обеспечивает стабилизацию напряжения в конце линии.
Поэтому каждый синхронный компенсатор снабжается автоматическим регулятором, изменяющим его ток возбуждения так, чтобы напряжение на зажимах компенсатора оставалось постоянным.
Возможно эта страница вам будет полезна:
Электрические машины постоянного тока
Двигатели постоянного тока были первыми электрическими машинами, преобразующими электрическую энергию в механическую. Позже их сменили электрические машины переменного тока. Однако, благодаря широкому диапазону регулирования частоты вращения, возможности задания фиксированных частот вращения, быстрому разгону и торможению, постоянному вращающему моменту, большим пусковым моментам и перегрузочной способности они находят вес более широкое применение в промышленности, на транспорте, в системах автоматики.
Некогда генераторы постоянного тока были основными источниками электроэнергии, но затем их вытеснили генераторы переменного тока. В настоящее время их применяют в основном в сочетании с электродвигателями постоянного тока в промышленности и на транспорте главным образом в системах электропитания специального оборудования.
Общий недостаток машин постоянного тока — это более сложная, более дорогая и менее надежная по сравнению с машинами переменного тока конструкция.
Принцип действия и устройство машин постоянного тока
Рассмотрим работу машины постоянного тока на примере простейшего генератора постоянного тока (ГПТ). Модель этого генератора представлена на рис. 7.19,д. Генератор состоит из постоянного магнита, создающего магнитный поток, и якоря — стального цилиндра с уложенным на нем витком abed из электропроводного материала. Концы витка присоединены к двум металлическим полукольцам — коллекторным пластинам (рис.7.19,а).

Рис. 7.19 Простейшая модель генератора постоянного тока (а),правило правой (б) и левой («) руки
Принцип действия ГПТ основан на использовании закона электромагнитной индукции. Если якорь вращать первичным двигателем, например, против часовой стрелки (рис.7.19,а), то в находящемся в рассматриваемый момент времени в зоне северного полюса N проводнике ab индуцируется ЭДС е, направленная, согласно правилу правой руки (рис.7.19,б), к наблюдателю. При этом в находящемся в зоне южного полюса S проводнике сd индуцируется ЭДС, направленная от наблюдателя. Таким образом, направление индуктируемой в проводнике ЭДС зависит от того, под каким полюсом он находится в данный момент времени. При этом в проводнике, перемещающемся в пространстве расположенном выше геометрической нейтрали, ЭДС всегда направлена в одном направлении, а в проводнике перемещающемся в пространстве расположенном ниже геометрической нейтрали, ЭДС всегда направлена в противоположном направлении. Линия, проходящая через центр якоря посредине между полюсами, называется геометрической нейтралью (поперечной осью).
ЭДС, индуцируемая в проводниках ab и cd вращающейся рамки, равна е =  , где В — индукция магнитного поля, / — длина проводника, v — линейная скорость движения проводника относительно магнитного поля. ЭДС витка равна сумме ЭДС, индуктируемых в проводниках
, где В — индукция магнитного поля, / — длина проводника, v — линейная скорость движения проводника относительно магнитного поля. ЭДС витка равна сумме ЭДС, индуктируемых в проводниках  .
.
При вращении якоря через каждые пол-оборота проводники ab и cd оказываются в поле противоположных полюсов. Поэтому направление ЭДС в них меняется на противоположное. Следовательно, при вращении якоря в витке индуцируется переменная ЭДС. Так как длина I проводника и линейная скорость v его передвижения являются постоянными величинами, ЭДС  зависит только от распределения магнитной индукции В под полюсами. Оно близко к синусоидальному и, следовательно, ЭДС между точками A-В рамки также практически является синусоидальной (рис. 7.20.я).
зависит только от распределения магнитной индукции В под полюсами. Оно близко к синусоидальному и, следовательно, ЭДС между точками A-В рамки также практически является синусоидальной (рис. 7.20.я).
Для получения во внешней цепи постоянного тока электрическая машина постоянного тока содержит коллектор и прижимающиеся к его поверхности две неподвижные контактные щетки.

Рис. 7.20. Переменная синусоидальная ЭДС в витке (а) и пульсирующий и ток во внешней цепи (б) простейшего генератора постоянного тока
В приведенной на рис. 7.19,67 простейшей модели коллектор состоит из двух изолированных друг от друга и от вала металлических полуколец, присоединенных к концам витка и вращающихся вместе с ним. Соединенные с внешней цепью две неподвижные контактные щетки установлены на линии геометрической нейтрали, проведенной посредине между полюсами. Благодаря этому, при вращении якоря каждая из них будет соприкасаться только с полукольцом, соединенным с тем проводником, который находится под полюсом данной полярности. При этом изменение направления ЭДС в проводниках ab и cd происходит одновременно с переключением подвижных полуколец к неподвижным щеткам. Благодаря этому, щетка А всегда (т.е. при любом положении якоря) соприкасается с полукольцом проводника, находящегося под полюсом Лг постоянного магнита (рис.7.19,я), а щетка В — с полукольцом проводника, находящегося под его полюсом 5. В результате полярность щеток в процессе работы машины остается неизменной, а ток во внешней цепи становится пульсирующими, т.е. постоянным по направлению и переменными по величине (рис.7.20,6).
Для уменьшения пульсации ЭДС и тока во внешней цепи на якоре реальных ГПТ размещают нс один, а значительно большее число витков. Концы каждого витка присоединяются к паре собственных контактных пластин, сдвинутых относительно друг друга па определенный угол и изолированных от соседних контактных пластин изолирующими прокладками. Совокупность контактных пластин и изолирующих прокладок образует коллектор, контактные пластины в коллекторе принято называть коллекторными пластинами. Коллектор и неподвижные контактные щетки образуют щёточноколлекторный узел машины постоянного тока.
Практически уже при 16 витках на якоре пульсации тока становятся незаметными и ток во внешней цепи можно считать постоянными нс только по направлению, но и по величине.
Машины постоянного тока обратимы и могут работать как в режиме генератора, так и в режиме двигателя.
Электрическая машина, модель которой приведена на рис.7.19,а, будет работать в режиме электрического двигателя, если к щеткам подвести постоянное напряжение (рис. 7.21).

Рис. 7.21. Электрическая машина постоянного тока в режиме двигателя
Под действием этого напряжения через щетки, коллекторные пластины и виток потечет ток i. Согласно закону Ампера на проводник длиной l с током i в магнитном поле с индукцией В действует сила f, направление которой определяется правилом левой руки (рис.7.19,«). В соответствии с этим законом и правилом левой руки на проводник ab витка действует сила f (рис. 7.21), направленная вправо, а на проводник cd — сила f направленная влево. Эта пара сил создаст вращающий момент  , поворачивающий виток по часовой стрелке. При вращении витка проводник ab переходит из зоны северного магнитного полюса в зону южного, а проводник cd — из зоны южного магнитного полюса в зону северного. Одновременно с этим переходом контактные пластины и соединенные с ними концы витка подключаются к щеткам другой полярности. Направление тока в витке изменится на противоположное, а направление сил f создающих вращающий момент , не изменится. На проводник витка, находящийся в зоне северного магнитного полюса, как и раньше, действует сила f направленная вправо, а на проводник, находящийся в зоне южного магнитного полюса — сила f , направленная влево.
, поворачивающий виток по часовой стрелке. При вращении витка проводник ab переходит из зоны северного магнитного полюса в зону южного, а проводник cd — из зоны южного магнитного полюса в зону северного. Одновременно с этим переходом контактные пластины и соединенные с ними концы витка подключаются к щеткам другой полярности. Направление тока в витке изменится на противоположное, а направление сил f создающих вращающий момент , не изменится. На проводник витка, находящийся в зоне северного магнитного полюса, как и раньше, действует сила f направленная вправо, а на проводник, находящийся в зоне южного магнитного полюса — сила f , направленная влево.
Таким образом, в режиме двигателя виток будет непрерывно вращаться в магнитном поле и, следовательно, приводить во вращение вал, па котором этот виток закреплен. При этом коллектор нс только обеспечивает электрическое соединение витка с внешней цепью, по и преобразует постоянный ток во внешней цепи в переменный ток в витке.
Устройство машин постоянного тока. Машина постоянного тока состоит из двух основных частей: статора и ротора. Статор — это неподвижная часть машины, обеспечивающая создание магнитного потока, т.с. статор в машинах постоянного тока является индуктором. Кроме того, статор является основным конструктивным элементом машины, в котором размещаются все остальные ее детали. Ротор — вращающаяся часть машины, в которой индуцируется электродвижущая сила и протекает ток нагрузки, т.с. в машинах постоянного тока ротор является якорем. При работе электрической машины в режиме двигателя в нем происходит преобразование электрической энергии в механическую, а при работе в режиме генератора — преобразование механической энергии в электрическую.
Статор (рис. 7.22) состоит из станины 1, основных (главных) полюсов 2, предназначенных для возбуждения главного магнитного потока, и дополнительных полюсов 5, служащих для улучшения коммутации.

Главный полюс 2 представляет собой электромагнит. Он состоит из сердечника полюса, размещенной на нем катушки обмотки возбуждения 3 и полюсного наконечника 4. Сердечник полюса набран из листовой стали и с одной стороны укреплен болтами на станине. Со стороны, обращенной к якорю, полюс заканчивается так называемым полюсным наконечником 4, форма и размеры которого выбираются таким образом, чтобы обеспечить требуемое распределение магнитного потока в зазоре между полюсным наконечником и якорем. Число главных полюсов всегда четное, причем северные и южные полюсы чередуются. Катушки возбуждения всех главных полюсов соединяются обычно последовательно, образуя обмотку возбуждения. При прохождении по пей постоянного тока в полюсах индуцируется магнитный поток возбуждения.
Дополнительные полюсы, как и основные, имеют сердечник и обмотку 6. Они устанавливаются в машинах повышенной мощности между главными полюсами для устранения искрения под щетками. Обмотки 6 дополнительных полюсов включают последовательно с обмоткой якоря.
Между полюсами машины вращается якорь 8, представляющий собой цилиндр, обычно набранный из листов электротехнической стали. В пазы па внешней поверхности якоря укладывается обмотка якоря 9, состоящая, как правило, из отдельных секций (ветвей), соединенных с коллектором 11. Якорь вместе с коллектором крепится па валу 7 машины.
Коллектор машины состоит из медных пластин, изолированных друг от друга изолирующими прокладками. Пластины вместе с прокладками образуют кольцо.
Щеточный механизм обеспечивает электрическое соединение обмотки якоря с внешней цепью. Он состоит из щеток 10, элементов, обеспечивающих их крепление к неподвижной части машины, и токособирающих шин. Щетки, как правило, изготавливают из графита. Обычно число пар щеток равняется числу главных полюсов машины. Щетки одинаковой полярности соединяются между собой с помощью токособирающих шин.
Коллектор и щеточный механизм в машинах постоянного тока являются наиболее ответственными узлами, от конструкции и качества исполнения которых в большой степени зависит надежность этих машин.
Способы возбуждения машин постоянного тока. Рабочие характеристики машин постоянного тока при работе как в режиме генератора, так и в режиме двигателя зависят от способа возбуждения главного магнитного поля. Большинство машин постоянного тока относятся к машинам с электромагнитным возбуждением, в которых одна или несколько обмоток возбуждения, питаются электрическим током.
Обмотка возбуждения и обмотка якоря в машинах с электромагнитным возбуждением могут питаться от одного или от разных источников постоянного тока. По схеме питания этих цепей машины постоянного тока разделяют на машины с независимым, параллельным, последовательным и смешанным возбуждением (рис. 7.23). К машинам с независимым возбуждениям относят также машины с возбуждением основного магнитного потока с помощью постоянных магнитов.

Рис. 7.23. Условные графические обозначения машины постоянного тока с независимым (а), параллельным (б), последовательным (в), смешанным (г) возбуждением и машины постоянного тока с магнитом (д)
В машине с независимым возбуждением все обмотки возбуждения питаются от посторонних источников электрического тока. В машине с самовозбуждением обмотки возбуждения питаются током якоря или частью тока якоря. Машина параллельного возбуждения — машина с самовозбуждением, цепь обмотки возбуждения которой соединена с цепью якоря параллельно непосредственно или через преобразовательное устройство. Машина последовательного возбуждения — машина с самовозбуждением, обмотка возбуждения которой соединена с цепью якоря последовательно непосредственно или через преобразовательное устройство. Машина смешанного возбуждения — машина с самовозбуждением, имеющая по меньшей мере две обмотки возбуждения, одна из которых соединена с цепью якоря последовательно непосредственно или через преобразовательное устройство, а остальные — параллельно.
Потери энергии и коэффициент полезного действия машин постоянного тока
При работе машины постоянного тока в режиме генератора происходит необратимый процесс преобразования механической энергии в электрическую энергию, при работе в режиме двигателя — необратимый процесс преобразования электрической энергии в механическую. Как и в электрических машинах переменного тока, эти процессы сопровождаются бесполезными потерями энергии. Обычно их делят основные потери и потери дополнительные. К основным потерям относят:
- основные электрические потери (так называемые потери в мели) , потери в обмотках машины, определяемые как произведение сопротивления постоянному току на квадрат тока в обмотке, и электрические потери в скользящих контактах;
- основные магнитные потери (так называемые потери в стали) — потери от гистерезиса и вихревых токов, возникающие в ферромагнитных участках магнитной цепи в электрической машине при их перемагничивании основным магнитным потоком;
- механические потери — потери электрической машины, возникающие в результате трения в подшипниках, фения щеток о коллектор или контактные кольца, трения вращающихся частей о воздух, вентиляционные и другие потери на трение.
 , потери в обмотках машины, определяемые как произведение сопротивления постоянному току на квадрат тока в обмотке, и электрические потери в скользящих контактах;
, потери в обмотках машины, определяемые как произведение сопротивления постоянному току на квадрат тока в обмотке, и электрические потери в скользящих контактах; — потери от гистерезиса и вихревых токов, возникающие в ферромагнитных участках магнитной цепи в электрической машине при их перемагничивании основным магнитным потоком;
— потери от гистерезиса и вихревых токов, возникающие в ферромагнитных участках магнитной цепи в электрической машине при их перемагничивании основным магнитным потоком; — потери электрической машины, возникающие в результате трения в подшипниках, фения щеток о коллектор или контактные кольца, трения вращающихся частей о воздух, вентиляционные и другие потери на трение.
— потери электрической машины, возникающие в результате трения в подшипниках, фения щеток о коллектор или контактные кольца, трения вращающихся частей о воздух, вентиляционные и другие потери на трение.К дополнительным потерям  относят все остальные потери, трудно поддающиеся учёту.
относят все остальные потери, трудно поддающиеся учёту.
Электрические потери  — потери в цепях обмотки возбуждения,
— потери в цепях обмотки возбуждения,  — потери в цепях якоря машины. Потери
— потери в цепях якоря машины. Потери  и
и  напряжение и ток источника питания цепи обмотки возбуждения. Потери в цепи якоря происходят в его обмотке и в щёточных контактах и определяются соответственно как
напряжение и ток источника питания цепи обмотки возбуждения. Потери в цепи якоря происходят в его обмотке и в щёточных контактах и определяются соответственно как  — суммарное сопротивление обмотки якоря и регулировочного сопротивления,
— суммарное сопротивление обмотки якоря и регулировочного сопротивления,  — ток якоря,
— ток якоря,  -падение напряжения на щеточных контактах.
-падение напряжения на щеточных контактах.
Магнитные потери  связаны с перемагничиванием сердечника якоря и протеканием в нем вихревых токов. Их величина определяется скоростью вращения якоря. В конструктивных элементах статора машины, образующих магнитопровод, эти потери практически отсутствуют.
связаны с перемагничиванием сердечника якоря и протеканием в нем вихревых токов. Их величина определяется скоростью вращения якоря. В конструктивных элементах статора машины, образующих магнитопровод, эти потери практически отсутствуют.
К дополнительным потерям  относят потери от вихревых токов в обмотках и в стали полюсных наконечников, вызванные пульсацией магнитного потока. Они не поддаются точному учёту и обычно принимаются равными 0,5% — 1 % подводимой или полезной мощности.
относят потери от вихревых токов в обмотках и в стали полюсных наконечников, вызванные пульсацией магнитного потока. Они не поддаются точному учёту и обычно принимаются равными 0,5% — 1 % подводимой или полезной мощности.
Таким образом, полные потери в машинах постоянного тока 
 .
.
Коэффициент полезного действия двигателя постоянного тока 
 — потребляемая двигателем электрическая мощность. Коэффициент полезного действия генератора постоянного тока
— потребляемая двигателем электрическая мощность. Коэффициент полезного действия генератора постоянного тока  — электрическая мощность на выходе генератора.
— электрическая мощность на выходе генератора.
Коэффициент полезного действия машин постоянного тока мощностью более 10 кВт составляет 0,85…0,96, причём большие значения КПД соответствуют машинам большей мощности. У машин мощностью до 50 Вт КПД составляет всего 0,15…0,5. Как и машин переменного тока КПД машин постоянного тока снижается с уменьшением нагрузки.
Генераторы постоянного тока
ЭДС обмотки якоря. При вращении якоря в магнитном поле статора в проводах его обмотки индуцируется ЭДС. В соответствии с (7.1) среднее значение ЭДС, индуктируемой в одном проводе обмотки якоря

где l — длина активной части проводника, v — скорость проводника,  -среднее значение магнитной индукции в воздушном зазоре (рис.7.24).
-среднее значение магнитной индукции в воздушном зазоре (рис.7.24).

ЭДС на зажимах генератора постоянного тока определяется ЭДС одной параллельной ветви обмотки якоря, так как независимо от числа параллельных ветвей все они поочередно подключаются к общим зажимам генератора через щетки и коллектор.
Если число проводников обмотки якоря равно А, а число параллельных ветвей обмотки якоря равно 2а. то средняя ЭДС, индуцируемая в обмотке якоря генератора постоянного тока

Подставив в (7.32)  , получим
, получим

где  — постоянный для данной машины постоянного тока коэффициент, N -число активных проводников в обмотке якоря, п — частота вращения якоря, Ф — полезный магнитный поток.
— постоянный для данной машины постоянного тока коэффициент, N -число активных проводников в обмотке якоря, п — частота вращения якоря, Ф — полезный магнитный поток.
Из (7.33) следует, ЭДС генератора постоянного тока прямо пропорциональна частоте вращения якоря и магнитному потоку. Следовательно, ЭДС генератора постоянного тока можно регулировать путем изменения магнитного потока или изменения частоты вращения якоря.
Характеристики генераторов постоянного тока. К основным рабочим характеристикам генераторов постоянного тока (ГПТ) относятся характеристика холостого хода, внешняя характеристика и регулировочная характеристика.
Характеристика холостого хода. Способность генератора плавно регулировать выходное напряжение определяется характеристикой холостого хода. Эта характеристика  определяет зависимость ЭДС Е генератора и, следовательно, магнитного потока Ф от тока возбуждения при постоянной частоте вращения якоря и при холостом ходе (ток нагрузки
определяет зависимость ЭДС Е генератора и, следовательно, магнитного потока Ф от тока возбуждения при постоянной частоте вращения якоря и при холостом ходе (ток нагрузки  ). Так как ЭДС пропорциональна магнитной индукции В, а напряженность магнитного ноля Н пропорциональна току возбуждения, зависимость
). Так как ЭДС пропорциональна магнитной индукции В, а напряженность магнитного ноля Н пропорциональна току возбуждения, зависимость  имеет такой же вид, как зависимость В(Н), т.е. характеристика холостого хода отображает свойства магнито провода.
имеет такой же вид, как зависимость В(Н), т.е. характеристика холостого хода отображает свойства магнито провода.
Внешняя характеристика — это зависимость  напряжения U на выводах цепи обмотки якоря от тока нагрузки . Внешняя характеристика позволяет определить, в каких пределах изменяется напряжение генератора при изменении нагрузки.
напряжения U на выводах цепи обмотки якоря от тока нагрузки . Внешняя характеристика позволяет определить, в каких пределах изменяется напряжение генератора при изменении нагрузки.
Регулировочной характеристикой генератора называют зависимость 
 тока возбуждения от тока нагрузки при постоянной частоте вращения и постоянном напряжении на зажимах генератора. Она показывает, как нужно изменять ток возбуждения для поддержания постоянным напряжение на зажимах генератора при изменении тока нагрузки.
тока возбуждения от тока нагрузки при постоянной частоте вращения и постоянном напряжении на зажимах генератора. Она показывает, как нужно изменять ток возбуждения для поддержания постоянным напряжение на зажимах генератора при изменении тока нагрузки.
Различают генераторы с независимым возбуждением и с самовозбуждением.
Генератор с независимым возбуждением. В этом генераторе (рис. 7.23,а) цепь якоря и цеххь возбуждения электрически разделены. Поэтому ток возбуждения не зависит от тока якоря, равнохо в этих генераторах току нагрузки.
Характеристика холостого хода генератора с независимым возбуждением приведена на рис. 7.25. В режиме холостого хода цепь нагрузки отключена, напряжение на зажимах генератора (на зажимах обмотки якоря) равно ЭДС  — — постоянный для данной машины коэффициент. Частота вращения якоря n постоянна. Поэтому ЭДС зависит только от магнитного потока, создаваемого обмоткой возбуждения, т.е. от тока возбуждения
— — постоянный для данной машины коэффициент. Частота вращения якоря n постоянна. Поэтому ЭДС зависит только от магнитного потока, создаваемого обмоткой возбуждения, т.е. от тока возбуждения
При  в обмотке якоря наводится ЭДС величина которой определяется остаточным магнитным потоком.
в обмотке якоря наводится ЭДС величина которой определяется остаточным магнитным потоком.

Рис. 7.25. Характеристика холостого хода генератора с независимым возбуждением
На начальном участке характеристики холостого хода имеет место практически линейная зависимость  . Изгиб характеристики объясняется насыщением магнитопровода. Номинальный ток возбуждения
. Изгиб характеристики объясняется насыщением магнитопровода. Номинальный ток возбуждения  выбирают таким, чтобы он соответствовал насыщенному участку характеристики холостого хода.
выбирают таким, чтобы он соответствовал насыщенному участку характеристики холостого хода.
Из приведенной на рис. 7.25 характеристики следует, что в генераторах с независимым возбуждением возможность изменения  в больших пределах обеспечивает регулировку ЭДС генератора тоже в больших пределах.
в больших пределах обеспечивает регулировку ЭДС генератора тоже в больших пределах.
Напряжение на выходе нагруженного на сопротивление нагрузки  генератора с независимым возбуждением (рис. 7.26)
генератора с независимым возбуждением (рис. 7.26)  . Это напряжение меньше ЭДС генератора на величину падения напряжения па внутреннем сопротивлении генератора
. Это напряжение меньше ЭДС генератора на величину падения напряжения па внутреннем сопротивлении генератора  , равном сумме сопротивления обмотки якоря и сопротивлений контактов щеток и коллектора.
, равном сумме сопротивления обмотки якоря и сопротивлений контактов щеток и коллектора.
Уравнение  определяет вид внешней характеристики генератора постоянного тока с независимым возбуждением в отсутствие реакции якоря. Она представляет собой слегка наклонную линию (рис. 7.27).
определяет вид внешней характеристики генератора постоянного тока с независимым возбуждением в отсутствие реакции якоря. Она представляет собой слегка наклонную линию (рис. 7.27).

Рнс. 7.26. Эквивалентная схема цепи якоря нагруженного генератора с независимым возбуждением
В режиме холостого хода ЭДС генератора однозначно определяется магнитным полем, создаваемым обмоткой возбуждения.
Если генератор работает под нагрузкой, в обмотке якоря протекает ток и создаст свое собственное магнитное поле, влияющее на магнитное поле, создаваемое обмоткой возбуждения.
Под реакцией якоря в машинах постоянного тока понимают воздействие магнитного поля якоря на возбуждающее магнитное поле главных полюсов.

Рис. 7.27. Внешние характеристики генератора независимого возбуждения при отсутствии (1) и наличии (2) размагничивающего действия реакции якоря
Считают, что реакция якоря оказывает размагничивающее действие на машину с насыщенной магнитной системой, гак как действие реакции якоря приводит к уменьшению средней магнитной индукции под полюсом. Это уменьшает ЭДС генератор. Поэтому напряжение на зажимах генератора снижается быстрее, чем в случае отсутствия размагничивающего действия реакции якоря (рис. 7.27).
При переходе от режима холостого хода к номинальному нагруженному режиму изменение напряжения на зажимах генератора определяется по формуле  . Для генераторов с независимым возбуждением
. Для генераторов с независимым возбуждением  .
.
Из регулировочной характеристики генератора с независимым возбуждением, приведенной на рис.7.28, видно, что с увеличением нагрузки необходимо увеличивать ток возбуждения  , чтобы компенсировать влияние падения напряжения на внутреннем сопротивлении генератора и реакции якоря. При переходе от режима холостого хода к номинальной нагрузке
, чтобы компенсировать влияние падения напряжения на внутреннем сопротивлении генератора и реакции якоря. При переходе от режима холостого хода к номинальной нагрузке  увеличение тока возбуждения, необходимое для поддержания напряжения на зажимах генератора постоянным, составляет 15 :25%.
увеличение тока возбуждения, необходимое для поддержания напряжения на зажимах генератора постоянным, составляет 15 :25%.

Рис. 7.28. Регулировочная характеристика генератора с независимым возбуждением
Таким образом, к достоинствам генераторов с независимым возбуждением можно отнести возможность регулировки напряжения в широких пределах путем изменения тока возбуждения и сравнительно небольшое изменение напряжения при изменении нагрузки. Недостатком этих генераторов является необходимость питания обмотки возбуждения от внешних источников электрической энергии.
Генераторы с самовозбуждением. Генераторы с самовозбуждением нс требуют независимого источника электрической энергии для питания обмотки возбуждения. Это заметно упрощает эксплуатацию машины.
Генератор с параллельным возбуждением. Обмотка возбуждения подключается к выходу генератора параллельно нагрузке (рис. 7.23,6). Ток якоря генератора разветвляется в нагрузку (97% — 99%) и в обмотку возбуждения.
При запуске генератора, когда якорь начинает вращаться первичным двигателем, благодаря остаточному намагничиванию станины статора, в обмотке якоря наводится небольшая ЭДС. Она создаст в обмотке возбуждения небольшой ток возбуждения. Самовозбуждение генератора произойдет при условии согласного соединения клемм цепи возбуждения и клемм цепи якоря. При выполнении этого условия ток возбуждения увеличивает магнитный поток остаточного магнетизма, и, следовательно, ЭДС. Возросшая ЭДС вызовет дальнейшее увеличение тока возбуждения и т.д. Этот процесс прекратится при наступлении насыщения магнитной цепи генератора.
Характеристики холостого хода и регулировочная характеристика генератора с параллельным возбуждением практически нс отличаются от характеристик такой же машины, работающей с независимым возбуждением.
Внешняя характеристика генератора с параллельным возбуждением несколько отличается от внешней характеристики генератора с независимым возбуждением (рис. 7.29). Уменьшение напряжения генератора с параллельным возбуждением с увеличением нагрузки обусловлено нс только потерей напряжения на якоре и реакцией якоря (как в генераторе с независимым возбуждением), но и уменьшением тока возбуждения при уменьшении напряжения.

Рис. 7.29. Внешние характеристики генератора параллельного возбуждения (1) и независимого возбуждения (2)
Постепенное увеличение нагрузки генератора (уменьшение сопротивления цепи нагрузки) вызывает увеличение тока якоря I и мощности, отдаваемой нагрузке. При этом напряжение U на зажимах генератора (рис. 7.29, кривая 1) и, следовательно, ток возбуждения уменьшается, но его величина соответствует условиям насыщения магнитной цепи. При  ток возбуждения уменьшается настолько, что магнитная система машины переходит в ненасыщенное состояние, соответствующее линейной части магнитной характеристики. В этом состоянии уменьшение тока возбуждения приводит к пропорциональному уменьшению ЭДС якоря, что, в свою очередь, приводит к дальнейшему уменьшению тока возбуждения и т.д. Генератор переходит в неустойчивый режим, приводящий к саморазмагничиванию генератора параллельного возбуждения. Этому режиму соответствует ветвь внешней характеристики генератора, лежащая ниже точки се перегиба (рис. 7.29, кривая 1).
ток возбуждения уменьшается настолько, что магнитная система машины переходит в ненасыщенное состояние, соответствующее линейной части магнитной характеристики. В этом состоянии уменьшение тока возбуждения приводит к пропорциональному уменьшению ЭДС якоря, что, в свою очередь, приводит к дальнейшему уменьшению тока возбуждения и т.д. Генератор переходит в неустойчивый режим, приводящий к саморазмагничиванию генератора параллельного возбуждения. Этому режиму соответствует ветвь внешней характеристики генератора, лежащая ниже точки се перегиба (рис. 7.29, кривая 1).
Генератору с параллельным возбуждением нс опасно короткое замыкание, так как в результате саморазмагничивания ток короткого замыкания создастся только за счет остаточного намагничивания магнитопровода.
В условиях устойчивого режима работы изменение напряжение генератора параллельного возбуждения не превышает 8-15%.
В генераторах с последовательным возбуждением (рис. 7.23,в) обмотка возбуждения включена к выходу генератора последовательно с нагрузкой. При увеличении нагрузки магнитный поток возбуждения возрастает соответственно току нагрузки и выходное напряжение генератора возрастает тоже. Эти генераторы применяются очень редко по причине большого изменения напряжения генератора при изменении нагрузки.
Генераторы смешанного возбуждения (рис. 7.23,г) имеют две обмотки возбуждения. Одна из них — параллельная (обычно основная) подключается к выходу генератора параллельно нагрузке, а вторая — последовательная подключается к выходу генератора последовательно с нагрузкой. Обе обмотки включаются согласно, т.с. так, чтобы их намагничивающие силы складывались. 0 увеличением нагрузки намагничивающая сила последовательной обмотки возрастает, компенсируя тем самым реакцию якоря и потери напряжения в якоре и в самой последовательной обмотке возбуждения. Путем соответствующего подбора числа витков последовательной и параллельной обмоток можно добиться, чтобы напряжение генератора практически нс зависело от нагрузки. У генераторов этого типа напряжение изменяется в пределах 2-3%.
Двигатели постоянного тока
Электрическая машина постоянного тока будет работать в режиме электрического двигателя, если к щеткам подвести постоянное напряжение U. Под действием этого напряжения в цепи якоря потечет ток , создающий магнитный ноток  . В цепи обмотки возбуждения, подключенной к источнику постоянного напряжения, протекает ток
. В цепи обмотки возбуждения, подключенной к источнику постоянного напряжения, протекает ток  . Ток обмотки возбуждения создаст магнитный поток
. Ток обмотки возбуждения создаст магнитный поток  . Результирующий магнитный поток
. Результирующий магнитный поток 
 .
.
В соответствии с законом Ампера в результате взаимодействия тока и магнитного потока  создается вращающий момент
создается вращающий момент  , под воздействием которого закрепленный на валу двигателя якорь вращается. При вращении проводники якоря пересекают магнитное поле , в них в соответствии с законом электромагнитной индукции наводится противо-ЭДС, направленная против напряжения питания якоря.
, под воздействием которого закрепленный на валу двигателя якорь вращается. При вращении проводники якоря пересекают магнитное поле , в них в соответствии с законом электромагнитной индукции наводится противо-ЭДС, направленная против напряжения питания якоря.
Двигатели постоянного тока отличаются друг от друга способом питания обмотки возбуждения. Как и генераторы постоянного тока, они могут иметь независимое (рис. 7.23,а), параллельное (рис. 7.23,б), последовательное (рис. 7.23,в) и смешанное (рис. 7.23,г) возбуждение.
Пуск двигателей постоянного тока. В начальный момент пуска двигателя якорь неподвижен, противо-ЭДС равна нулю. Пусковой ток якоря 
 в этом случае определяется сопротивлением цепи якоря
в этом случае определяется сопротивлением цепи якоря  . Так как сопротивление мало, при прямом пуске двигателя путем непосредственного включения его в сеть ток
. Так как сопротивление мало, при прямом пуске двигателя путем непосредственного включения его в сеть ток  достигает недопустимо больших значений, в 10-20 раз и более превышающих номинальный ток. Это может вызвать поломку вала, чрезмерный перегрев обмотки якоря и сильное искрение под щетками. Поэтому прямой пуск двигателя производят только в двигателях малой мощности до 1 кВт. Пуск двигателей средней и большой мощности осуществляют с помощью добавочных пусковых реостатов — активных переменных сопротивлений, включенных в цепь якоря. Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя.
достигает недопустимо больших значений, в 10-20 раз и более превышающих номинальный ток. Это может вызвать поломку вала, чрезмерный перегрев обмотки якоря и сильное искрение под щетками. Поэтому прямой пуск двигателя производят только в двигателях малой мощности до 1 кВт. Пуск двигателей средней и большой мощности осуществляют с помощью добавочных пусковых реостатов — активных переменных сопротивлений, включенных в цепь якоря. Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя.
В начале пуска вводится все сопротивление реостата. По мере увеличения частоты вращения якоря возрастает противо-ЭДС, ток в обмотке якоря уменьшается, в следствие чего сопротивление пускового реостата следует постепенно уменьшать. При достижении номинальной частоты вращения якоря пусковой реостат полностью выводится, т.е. его сопротивление делается равным пулю.
Регулирование частоты вращения электродвигателя постоянного тока.
Частота вращения двигателя постоянного тока:

где U — напряжение питающей сети, — ток якоря; — сопротивление цепи якоря;  — коэффициент, характеризующий магнитную систему; Ф — магнитный поток электродвигателя.
— коэффициент, характеризующий магнитную систему; Ф — магнитный поток электродвигателя.
Из приведенной формулы видно, что частоту вращения двигателя постоянного тока можно регулировать изменением потока возбуждения электродвигателя, изменением подводимого к электродвигателю напряжения и изменением сопротивления в цепи якоря
Наиболее широкое применение получили первые два способа регулирования, третий способ применяют редко.
К основным недостаткам двигателей постоянного тока следует отнести сложность конструкции и необходимость постоянного наблюдения за работой щеток и коллектора, быстрый износ щеточно-коллекторного узла. Кроме того, двигатели постоянного тока требуют специальных источников питания, так как все электрические станции вырабатывают только переменный ток. Поэтому двигатели постоянного тока применяются только там, где заменить их двигателями переменного тока трудно.
Основные достоинства двигателей — возможность плавной регулировки скорости в широких пределах, хорошие характеристики запуска, лёгкая регулировка направления вращения.
Кстати дополнительная теория из учебников по электрическим машинам тут.
Сигналы
Понятие сигнала является одним из основных понятий электроники. Сигнал есть существующий в системе физический процесс, имеющий множество состояний, которые он принимает в соответствии с внешними воздействиями на эту систему. Основным свойством сигнала является то, что он несет информацию о воздействии на эту систему.
Поскольку реальные физические процессы протекают во времени, то в качестве математической модели сигнала, представляющего эти процессы, используют функции времени, отражающие изменения физических процессов.
Сигнал может быть звуковым, световым, в виде почтового отправления и др. Наиболее распространен сигнал в электрической форме в виде зависимости напряжения от времени u(t).
Классификации сигналов
По роли в передачи конкретной информации сигналы могут быть разделены на полезные и мешающие (помехи). Полезные сигналы переносят заданную информацию, а помехи искажают се, хотя, может быть, и переносят другую информацию.
По степени определенности ожидаемых значений сигнала все сигналы можно разделить на детерминированные сигналы и случайные сигналы. Детерминированным называется сигнал, значение которого в любой момент времени может быть точно определено. Детерминированные сигналы могут быть периодическими и непериодическими.
Периодическим называется сигнал, для которого выполняется условие  — любое целое число, Т — период, являющийся конечным отрезком времени. Пример периодического сигнала — гармоническое колебание (рис.8.1)
— любое целое число, Т — период, являющийся конечным отрезком времени. Пример периодического сигнала — гармоническое колебание (рис.8.1)


Рис. 8.1. Гармонический сигнал
Здесь  — соответственно амплитуда, период, частота, угловая частота и начальная фаза колебания.
— соответственно амплитуда, период, частота, угловая частота и начальная фаза колебания.
К сложным периодическим сигналам можно отнести импульсные сигналы различной формы (электрические импульсы)
Электрический импульс — это кратковременное скачкообразное изменение электрического напряжения или силы тока.
По характеру изменения во времени различают электрические импульсы прямоугольной, пилообразной, экспоненциальной, колоколобразной и других форм (рис. 8.2). Реальный импульс может иметь достаточно сложную форму (рис. 8.3), которая характеризуется амплитудой A, длительностью импульса  , длительностью фронта
, длительностью фронта  и длительностью спада
и длительностью спада  , величиной скола вершины
, величиной скола вершины  .
.

Любой сложный периодический сигнал может быть представлен в виде суммы гармонических колебаний с частотами, кратными основной частоте.
Непериодический сигнал, как правило, охраничен во времени.
Случайным сигналом называют сигнал, значение которого заранее неизвестно и может быть ххредсказано лишь с некоторой вероятностью. Количественные характеристики случайных сигналов, позволяющие ххроизводить их оценку и сравнение, называют статистическими.
Выходные сигналы датчиков (первичных преобразователей) являются отражением некоторых физических процессов. Они, как правило, неххрерыв-ны, поскольку большинство физических процессов непрерывны но своей ххрироде. Такие сигналы называются аналоговыми.
Аналоговый сигнал описывается непрерывной (или кусочпо-пепрсрывной) функцией, причем сама функция, как и се аргумент, может принимать в заданных пределах любые значения. Аналоговые сигналы достаточно просто генерировать и обрабатывать, однако они позволяют решать относительно простые технические задачи. Работа современных электронных систем основана на использовании цифровых сигналов.
Среди детерминированных сигналов особое место занимают испытательные сигналы, необходимость в существовании которых обусловлена потребностями испытания характеристик разрабатываемых электронных устройств.
Гармоническое колебание. Самым распространенным испытательным сигналом является гармоническое колебание, которое используется в измерительной практике для оценки частотных свойств устройств различного назначения.
Единичный скачок. Другим испытательным сигналом является единичный скачок (единичная функция)  :
:

Дельта-функция. По определению  -функция удовлетворяет следующим условиям:
-функция удовлетворяет следующим условиям:

Таким образом, -функция равна нулю при всех отличных от  значениях аргумента и принимает в точке
значениях аргумента и принимает в точке  бесконечно большое значение. Площадь под кривой, ограниченной -функцией, равна единице.
бесконечно большое значение. Площадь под кривой, ограниченной -функцией, равна единице.
Трансформаторы
Назначение и устройство трансформатора
Трансформатор — это статическое электромагнитное устройство, имеющее две или более индуктивно связанные обмотки и предназначенное для преобразования посредством электромагнитной индукции одной или нескольких систем переменного тока в одну или несколько других систем переменного тока.
Трансформаторы широко применяются при передаче электрической энергии на большие расстояния, распределении ее между приемниками, а также в аппаратуре бытовой и промышленной электроники, в аппаратуре средств связи.
На электростанциях генераторы переменного тока вырабатывают электрическую энергию при напряжениях (6 кВ — 24 кВ), недостаточных для экономичной передачи электроэнергии на большие расстояния. Поэтому на каждой электростанции устанавливают трансформаторы, осуществляющие повышение напряжения в линиях электропередач до 750 кВ и более.
Напряжение, при котором происходит передача энергии, является слишком высокими для непосредственного использования и поэтому подводится потребителям через понижающие трансформаторы.
В составе электронной аппаратуры наиболее широко трансформаторы применяются в схемах электрического питания, в выпрямителях, фильтрах, стабилизаторах, регуляторах напряжения и тока, усилителях звуковой частоты. Существуют практические схемы, в которых трансформатор используется для изоляции одной электрической цепи от другой.
В зависимости от назначения различают трансформаторы:
- силовые, применяемые для преобразования электрической энергии в электрических сетях и установках, предназначенных для приема и использования электрической энергии;
- силовые специального назначения, применяемые для питания сварочных аппаратов, электропечей и других потребителей особого назначения;
- измерительные, применяемые для включения электрических измерительных приборов в цепях высокого напряжения или сильного тока:
- испытательные, применяемые для получения высоких и сверхвысоких напряжений, необходимых при испытаниях на электрическую прочность электроизоляционных изделий;
- радиотрансформаторы, применяемые в устройствах радио- и проводной связи, в системах автоматики и телемеханики для получения требуемых напряжений, согласования сопротивлений электрических цепей, гальванической развязки цепей и др.
В состав трансформатора входят три функциональные части: магнитная система трансформатора (магнитопровод), обмотки, а также система охлаждения.
Магнитная система — комплект пластин или других элементов из электротехнической стали или другого ферромагнитного материала, предназначенный для локализации в нем основного магнитного поля трансформатора
Магнитопровод образует замкнутый для магнитного потока контур. Часть магнитопровода, на котором располагаются основные обмотки, трансформатора, называется стержнем. Стержни соединяются верхним и нижним ярмом.
По форме магнитопровода различают трансформаторы стержневого, броневого и тороидального типов.
У однофазного трансформатора стержневого типа (рис. 6.1) стержни, на которых размещены первичная и вторичная обмотки, соединены с торцов ярмами, образуя замкнутый магнитопровод.
Однофазные трансформаторы броневого типа имеют разветвленный магнитопровод с одним стержнем и ярмами, частично прикрывающими («бронирующими») обмотки (рис. 6.1).
Благодаря таким достоинствам, как простота ремонта и лучшие условия охлаждения, трансформаторы стержневого типа имеют большее распространение, чем трансформаторы броневого типа.
 Рис. 6.1. Магнитопроводы трансформаторов стержневого и броневого типов
Рис. 6.1. Магнитопроводы трансформаторов стержневого и броневого типов
В последнее время получили распространение трансформаторы, магнитопроводы которых изготавливаются из узкой ленты электротехнической стали (рис. 6.2). Такие магнитопроводы разрезаны на две половины, на их стержни размещаются обмотки. Затем половины магнитопровода стягиваются и закрепляются. На рис. 6.3 показаны ленточные трансформаторы стержневого и броневого типов
 Рис. 6.2. Ленточные магнитопроводы
Рис. 6.2. Ленточные магнитопроводы
Трансформатор тороидального типа (тороидальный трансформатор) -силовой однофазный понижающий или повышающий трансформатор, который имеет тороидальный магнитопровод с двумя или более обмотками (рис. 6.4). Применение тороидального магнитопровода обеспечивает существенное уменьшение веса и размеров трансформатора и, как следствие, заметное улучшение технико-экономических показателей.
 Рис. 6.3. Ленточные однофазные трансформаторы стержневого (а) и броневого (б) типов
Рис. 6.3. Ленточные однофазные трансформаторы стержневого (а) и броневого (б) типов
Практически идеальная, по мнению специалистов, кольцевая форма магнитопровода позволяет заметно уменьшить длину обмоток и, следовательно, их сопротивление, что приводит к увеличению КПД трансформатора.
 Рис. 6.4. Тороидальный трансформатор
Рис. 6.4. Тороидальный трансформатор
Тороидальные трансформаторы, используемые взамен устройств с шихтованными сердечниками, обеспечивают немалую экономию электроэнергии. Ее показатели составляют от 30% (работа под нагрузкой) до 80% (холостой ход). Низкое значение рассеяния, которое меньше такового у стержневых и броневых трансформаторов на 70-80%, является еще одним преимуществом тороидальных трансформаторов.
Основная обмотка трансформатора — обмотка, к которой подводится энергия преобразуемого или от которой отводится энергия преобразованного переменного тока.
Первичной обмоткой трансформатора является обмотка, к которой подводится энергия преобразуемого переменного тока. Обмотка, от которой отводится энергия преобразованного переменного тока, является вторичной.
По виду охлаждения различают трансформаторы с воздушным (сухие трансформаторы) и с масляным (масляные трансформаторы) охлаждением.
При работе трансформатора происходит нагрев обмоток и магнитопровода за счет потерь энергии в них. Предельный на1рев частей трансформатора ограничивается изоляцией, срок службы которой зависит от температуры на1рева. Чем больше мощность трансформатора, тем больше мощности рассеивается в виде тепла и тем интенсивнее должна быть система охлаждения.
Сухие трансформаторы имеют воздушное охлаждение. Оно осуществляется путем естественной конвекции воздуха и излучения. Данная система охлаждения малоэффективна, поэтому применяется для трансформаторов мощностью до 10 МВА при напряжении до 35 кВ.
В масляных трансформаторах магнитопровод с обмотками находится в баке, заполненном трансформаторным маслом, которое является хорошим изолятором и охлаждающим агентом. Омывая обмотки и магнитопровод, трансформаторное масло отбирает от них тепло и, обладая более высокой теплопроводностью, чем воздух, через стенки бака отдаст его в окружающую среду. Трансформаторное масло обеспечивает более надежную работу высоковольтных трансформаторов, так как электрическая прочность масла намного выше, чем воздуха. Масляное охлаждение интенсивнее воздушного, поэтому габариты и вес масляных трансформаторов меньше, чем у сухих трансформаторов такой же мощности.
Следует отмстить, что в настоящее время ведутся разработки новых конструкций трансформаторов с обмотками, охлаждаемыми до очень низких температур. Металл при низких температурах обладает сверхпроводимостью, что позволяет резко уменьшить сечение обмоток. Трансформаторы с использованием принципа сверхпроводимости (криогенные трансформаторы) будут иметь малую транспортировочную массу при мощностях 1 000 МВД и выше.
Масляный трансформатор взрыво — и пожароопасен, поэтому, когда из-за пожарной безопасности недопустимы масляные трансформаторы, используют сухие или трансформаторы с негорючим заполнителем (совтолом, пи-ранолом, кварцевым песком). Поскольку отсутствует масло, сухие трансформаторы можно устанавливать непосредственно в цехах промышленных предприятий без устройства специальных трансформаторных камер
По числу трансформируемых фаз различают трансформаторы однофазные и многофазные.
Однофазный двухобмоточный трансформатор (рис. 6.5) состоит из замкнутого стального сердечника, служащего магнитопроводом, и размещенных па нем первичной и вторичной обмоток двух с разным числом витков:  и
и  . К первичной обмотке трансформатора подводится напряжение
. К первичной обмотке трансформатора подводится напряжение  создающее ток
создающее ток  . Магнитный поток Ф, замыкающийся по сердечнику, сцеплен с обеими обмотками. К вторичной обмотке через ключ подключено сопротивление нагрузки
. Магнитный поток Ф, замыкающийся по сердечнику, сцеплен с обеими обмотками. К вторичной обмотке через ключ подключено сопротивление нагрузки  .
.
 Рис. 6.5. Электромагнитная схема (а) и примеры условных графических обозначений однофазного (б) и трехфазного (я) трансформатора
Рис. 6.5. Электромагнитная схема (а) и примеры условных графических обозначений однофазного (б) и трехфазного (я) трансформатора
Магпитопровод собран из отдельных листов электротехнической стали, имеющей малые потери на перемагничивание и на вихревые токи. Для уменьшения вихревых токов, индуктируемых в стали переменным потоком, отдельные листы стали магнитопровода изолированы слоем лака.
Обмотки изолированы электрически одна от другой и от сердечника и обычно выполнены из медного провода.
Магнитный поток Ф пропорционален току  . При питании первичной обмотки переменным током изменения тока будут непрерывны и в обеих обмотках (по закону электромагнитной индукции) будут непрерывно наводиться ЭДС. При замыкании вторичной обмотки па какое-либо сопротивление, ЭДС этой обмотки
. При питании первичной обмотки переменным током изменения тока будут непрерывны и в обеих обмотках (по закону электромагнитной индукции) будут непрерывно наводиться ЭДС. При замыкании вторичной обмотки па какое-либо сопротивление, ЭДС этой обмотки  создаст ток
создаст ток  . Таким образом, магнитный поток связывает первичную и вторичную обмотки и переносит энергию от первичной цепи к вторичной. В первичной обмотке подведенная к ней электрическая энергия превращается в магнитную, во вторичной обмотке магнитная энергия потока Ф превращается опять в электрическую, но с измененными значениями
. Таким образом, магнитный поток связывает первичную и вторичную обмотки и переносит энергию от первичной цепи к вторичной. В первичной обмотке подведенная к ней электрическая энергия превращается в магнитную, во вторичной обмотке магнитная энергия потока Ф превращается опять в электрическую, но с измененными значениями  .
.
Трансформатор — это аппарат переменного тока. Если его первичную обмотку подключить к источнику постоянного тока, то магнитный поток в магнитопроводе трансформатора также будет постоянным как по величине, так и по направлению. Поэтому и в обмотках трансформатора нс будет наводиться ЭДС.
Принцип действия трансформатора
Принцип действия трансформатора рассмотрим на примере однофазного трансформатора (рис. 6.5), у которого отсутствует магнитное поле рассеяния и имеется только один рабочий магнитный поток Ф, замыкающийся через магнитопровод.
При подаче напряжения  на первичную обмотку трансформатора по ней начнет протекать переменный ток создающий в магнитопроводе переменный магнитный поток Ф. Согласно закону электромагнитной индукции, переменный магнитный потока индуцирует в первичной обмотке ЭДС, мгновенное значение которой
на первичную обмотку трансформатора по ней начнет протекать переменный ток создающий в магнитопроводе переменный магнитный поток Ф. Согласно закону электромагнитной индукции, переменный магнитный потока индуцирует в первичной обмотке ЭДС, мгновенное значение которой  . Здесь — число витков в первичной обмотке.
. Здесь — число витков в первичной обмотке.
Для синусоидального магнитного потока  ЭДС в первичной обмотке
ЭДС в первичной обмотке

Отсюда действующее значение ЭДС в первичной обмотке

Так как один и тот же магнитный поток пронизывает как первичную, так и вторичную обмотки, действующее значение ЭДС вторичной обмотки

где — число витков во вторичной обмотке.
Отношение ЭДС  называется коэффициентом трансформации трансформатора.
называется коэффициентом трансформации трансформатора.
Этот коэффициент определяется при работе трансформатора в режиме холостого хода, когда ключ в цепи вторичной обмотки разомкнут, а на зажимы первичной обмотки подано номинальное напряжение. В этом случае выходное напряжение трансформатора (напряжение на вторичной обмотке или вторичное напряжение) 
Напряжение  , поданное па первичную обмотку трансформатора (первичное напряжение), превышает ЭДС
, поданное па первичную обмотку трансформатора (первичное напряжение), превышает ЭДС  , па величину падения напряжения на полном сопротивлении первичной обмотки, вызываемого током холостого хода
, па величину падения напряжения на полном сопротивлении первичной обмотки, вызываемого током холостого хода  . Но этот ток в режиме холостого хода относительно мал и поэтому
. Но этот ток в режиме холостого хода относительно мал и поэтому  .
.
Следовательно, отношение  практически равно коэффициенту трансформации, т.е.
практически равно коэффициенту трансформации, т.е.  . Более того у современных трансформаторов коэффициент трансформации с достаточной степенью точности определяет отношение
. Более того у современных трансформаторов коэффициент трансформации с достаточной степенью точности определяет отношение  в широком диапазоне изменения нагрузки трансформатора, т.е.
в широком диапазоне изменения нагрузки трансформатора, т.е.  .
.
Трансформатор, которого  называется повышающим, трансформатор, которого
называется повышающим, трансформатор, которого  называется понижающим.
называется понижающим.
При замыкании ключа (рис.6.5) во вторичной обмотке трансформатора появится ток , возбуждающий в магнитопроводе свой магнитный поток  . В соответствии с правилом Ленца он направлен навстречу потоку Ф, создаваемому первичной обмоткой. В результате суммарный магнитный поток в магнитопроводе уменьшится, что приведет к уменьшению ЭДС в первичной обмотке и, следовательно, к увеличению тока в первичной обмотке. Это явление называют размагничивающим действием тока вторичной обмотки. Ток в первичной обмотке (первичный ток) будет возрастать до тех пор, пока не прекратится размагничивающее действие тока нагрузки. В результате суммарный магнитный поток восстановится приблизительно до прежнего значения Ф прежнему значению.
. В соответствии с правилом Ленца он направлен навстречу потоку Ф, создаваемому первичной обмоткой. В результате суммарный магнитный поток в магнитопроводе уменьшится, что приведет к уменьшению ЭДС в первичной обмотке и, следовательно, к увеличению тока в первичной обмотке. Это явление называют размагничивающим действием тока вторичной обмотки. Ток в первичной обмотке (первичный ток) будет возрастать до тех пор, пока не прекратится размагничивающее действие тока нагрузки. В результате суммарный магнитный поток восстановится приблизительно до прежнего значения Ф прежнему значению.
Таким образом, магнитный поток в трансформаторе остается практически постоянным как в режиме холостого хода, так и режиме нагрузки. Это свойство трансформатора называют способностью саморегулирования
Уравнения и схема замещения трансформатора
В нагрузочном режиме трансформатора первичная обмотка подключена к источнику напряжения  а вторичная замкнута на нагрузку
а вторичная замкнута на нагрузку  . В каждой из обмоток протекает ток и кроме основного результирующего магнитного потока Ф, замыкающегося по магнитопроводу, обмотки создают небольшие потоки рассеяния
. В каждой из обмоток протекает ток и кроме основного результирующего магнитного потока Ф, замыкающегося по магнитопроводу, обмотки создают небольшие потоки рассеяния  , замыкающиеся по воздуху. Воздух является линейной средой для магнитного поля, поэтому в схеме замещения трансформатора, представленной на рис.6.6, потоки рассеяния обмоток учтены в виде индуктивностей рассеяния
, замыкающиеся по воздуху. Воздух является линейной средой для магнитного поля, поэтому в схеме замещения трансформатора, представленной на рис.6.6, потоки рассеяния обмоток учтены в виде индуктивностей рассеяния  . Активные сопротивления
. Активные сопротивления  первичной и вторичной обмоток на этой схеме замещения показаны вне обмоток, а сами обмотки не имеют активного сопротивления и не создают потоков рассеяния. Они вместе с магнитопроводом образуют так называемый идеализированный трансформатор.
первичной и вторичной обмоток на этой схеме замещения показаны вне обмоток, а сами обмотки не имеют активного сопротивления и не создают потоков рассеяния. Они вместе с магнитопроводом образуют так называемый идеализированный трансформатор.
 Рис. 6.6. Схема замещения трансформатора
Рис. 6.6. Схема замещения трансформатора
Схеме замещения трансформатора соответствуют уравнения напряжений для первичной и вторичной обмоток, составленные по второму закону Кирхгофа:

где  — индуктивные сопротивления рассеяния первичной и вторичной обмоток,
— индуктивные сопротивления рассеяния первичной и вторичной обмоток,  — комплексные сопротивления обмоток, учитывающие их активные сопротивления и индуктивности рассеяния.
— комплексные сопротивления обмоток, учитывающие их активные сопротивления и индуктивности рассеяния.
Из сравнения уравнений трансформатора (6.4) с выражениями (6.2) и (6.3) следует, что отношение действующих значений напряжений между выводами вторичной обмотки и между выводами первичной обмотки нс совпадает с отношением действующих значений ЭДС, индуцируемых в этих обмотках магнитным потоком Ф в магнитопроводе. Действующие значения напряжений  называют полными внутренними падениями напряжения на первичной и вторичной обмотках трансформатора.
называют полными внутренними падениями напряжения на первичной и вторичной обмотках трансформатора.
Следует отмстить, что, благодаря специальным мерам, снижающим потоки рассеяния и активные сопротивления обмоток, значения полных внутренних падений напряжения на обмотках трансформаторов с Р > 1кВт составляют несколько процентов.
Внешняя характеристика и коэффициент полезного действия трансформатора
Если первичное напряжение трансформатора постоянно и равно номинальному значению  , то при изменении сопротивления нагрузки изменяются токи в обмотках трансформатора
, то при изменении сопротивления нагрузки изменяются токи в обмотках трансформатора  и вторичное напряжение
и вторичное напряжение  .
.
Внешней характеристикой трансформатора называют зависимость вторичного напряжения от тока нагрузки  при постоянном коэффициенте мощности нагрузки
при постоянном коэффициенте мощности нагрузки  и номинальном первичном напряжении
и номинальном первичном напряжении  . При определении внешней характеристики обычно ток задают не в абсолютных, а в относительных единицах
. При определении внешней характеристики обычно ток задают не в абсолютных, а в относительных единицах  — коэффициент загрузки трансформатора, а
— коэффициент загрузки трансформатора, а  — номинальный ток вторичной обмотки.
— номинальный ток вторичной обмотки.
 Рис. 6.7. Внешние характеристики трансформатора
Рис. 6.7. Внешние характеристики трансформатора
Из представленных на рис. 6.7 внешних характеристик трансформатора видно, что при активной и активно-индуктивной нагрузке наблюдается падение напряжения выходного напряжения трансформатора с ростом нагрузки, а для активно-емкостной нахрузки/выходное напряжение увеличивается с ростом тока нагрузки.
Коэффициент полезного действия (КПД) трансформатора определяется отношением активной мощности  , отдаваемой трансформатором приемнику, к активной мощности
, отдаваемой трансформатором приемнику, к активной мощности  потребляемой трансформатором. Мощность меньше мощности на величину потерь мощности
потребляемой трансформатором. Мощность меньше мощности на величину потерь мощности  . В реальном нагруженном трансформаторе эти потери приблизительно составляют только 2% мощности, потребляемой трансформатором. Поэтому КПД трансформаторов
. В реальном нагруженном трансформаторе эти потери приблизительно составляют только 2% мощности, потребляемой трансформатором. Поэтому КПД трансформаторов  весьма высок. У больших трансформаторов при полной нагрузке он превышает 99%. КПД существенно снижается лишь у малых трансформаторов.
весьма высок. У больших трансформаторов при полной нагрузке он превышает 99%. КПД существенно снижается лишь у малых трансформаторов.
Высокий КПД трансформаторов позволяет утверждать, что трансформатор не изменяет величины подводимой к нему мощности. Это значит, что мощность  , подведенная к первичной обмотке, приблизительно равна мощности
, подведенная к первичной обмотке, приблизительно равна мощности  , отдаваемой вторичной обмоткой в нагрузку. Углы сдвига фаз в первичной
, отдаваемой вторичной обмоткой в нагрузку. Углы сдвига фаз в первичной  и вторичной
и вторичной  обмотках трансформатора определяются, в основном, характером нагрузки и могут считаться равными. Таким образом,
обмотках трансформатора определяются, в основном, характером нагрузки и могут считаться равными. Таким образом,  и, следовательно,
и, следовательно,  , т.е. токи в обмотках трансформатора обратно пропорциональны напряжениям.
, т.е. токи в обмотках трансформатора обратно пропорциональны напряжениям.
Потери мощности в трансформаторе складываются:
- из электрических потерь, обусловленных нагревом проводников первичной и вторичной обмоток при протекании по ним тока (их иногда называют потерями в меди);
- магнитных потерь» от гистерезиса и вихревых токов в перемагничиваемом магнитопроводе трансформатора (потерь в стали).
Электрические потери. Потери в проводах обмоток называют переменными потерями трансформатора. При изменении полного сопротивления приемника изменяются его мощность, токи в обмотках трансформатора и, следовательно, потери в проводах обмоток и КПД трансформатора.
Потери на гистерезис. Потребляемая трансформатором от сети мощность, расходуется на создание магнитного потока, т.е. на намагничивание магнитопровода, состоящего из листов трансформаторной стали. Так как переменный ток изменяет свое направление, то направление магнитного потока также изменяется. Следовательно, сталь магнитопровода намагничивается и размагничивается попеременно. При перемагничивании сталь нагревается, т.е. электрическая энергия, подводимая к трансформатору, частично преобразуется в тепловую и рассеивается в окружающее пространство. В этом физически и заключаются потери мощности на гистерезис. При этом удельные потери энергии на гистерезис пропорциональны квадрату максимальной индукции Вт и частоте перемагничивания.
Для уменьшения потерь на гистерезис магнитопровод изготавливают из трансформаторной стали, имеющей узкую петлю гистерезиса.
Потери на вихревые токи. Переменный магнитный поток индуцирует ЭДС в металле магнитопровода. Такие ЭДС являются источником возникновения индуцированных токов, которые действуют в массе магнитпровода, замыкаясь в его объёме. Эти токи принято называть вихревыми токами.
Вихревые токи порождают свои собственные магнитные потоки, которые противодействуют магнитному потоку катушки и ослабляют его. Кроме того, они вызывают нагрев сердечника, что является бесполезной тратой энергии и неизбежно приводит к потерям энергии (потерям на вихревые токи).
Потери на вихревые токи зависят от удельного сопротивления материала магнитопровода и от частоты магнитного поля. Для уменьшения этой составляющей потерь, применяют специальные трансформаторные стали с большим удельным сопротивлением. Кроме того магнитопровод набирают из отдельных тонких (О, I — 0,5 мм) пластин, изолированных друг от друга с помощью специального лака или окалины.
Трехфазные трансформаторы
Трехфазные цепи широко распространены в энергетике и используются для производства и передачи электрической энергии. Трехфазный ток в таких цепях можно трансформировать с помощью трансформатора, состоящего из грех отдельных однофазных трансформаторов (рис. 6.8). Такой трансформатор называют трехфазной группой однофазных трансформаторов или групповым трансформатором. В нем обмотки всех трех фаз магнитно не связаны друг с другом, каждая фаза имеет свою магнитную цепь.
 Рис. 6.8. Трехфазная группа однофазных трансформаторов
Рис. 6.8. Трехфазная группа однофазных трансформаторов
Чаще трехфазный ток трансформируется одним трехфазным трансформатором, у которого обмотки всех трех фаз магнитно связаны между собою, так как имеют общую магнитную цепь. Магнитопровод такого трансформатора имеет три одинаковых стержня, размешенные в одной плоскости, и верхнее и нижнее ярмо. На каждом стержне размещается первичная и вторичная обмотка соответствующей фазы (рис. 6.9). Начала первичных обмоток трансформатора обозначают большими буквами  ; начала вторичных обмоток — малыми буквами
; начала вторичных обмоток — малыми буквами  . Концы первичных обмоток обозначаются большими буквами
. Концы первичных обмоток обозначаются большими буквами  ; концы вторичных обмоток — малыми буквами
; концы вторичных обмоток — малыми буквами  .
.
Групповой трансформатор несколько дороже трехфазного трансформатора на ту же мощность, имеет несколько более низкий КПД и занимает больше места, хотя каждый однофазный трансформатор группы (так называемая «фаза») меньше по габаритам и по весу, чем трехстержневой трансформатор на полную мощность группы.
 Рис. 6.9. Трехфазный стержневой трансформатор
Рис. 6.9. Трехфазный стержневой трансформатор
Групповой трансформатор имеет преимущества при больших мощностях, где условия перевозки и надежность при эксплуатации имеют особенно большое значение. Наоборот, трансформаторы средней и особенно малой мощности выполняются главным образом как трехстержневые.
При питании трехфазного трансформатора от симметричной трехфазной сети, формирующей равные по величине и сдвинутые на 120° ЭДС, в его стержнях возбуждаются симметричные магнитные потоки. В групповом трансформаторе длины магнитных цепей всех трех фаз одинаковы, тогда как в трехстержневом — различны, причем магнитная проводимость для потоков крайних фаз А и С меньше, чем для средней фазы В. Поэтому намагничивающие силы этих фаз и, следовательно, намагничивающие токи трехфазного трансформатора в режиме холостого хода образуют ассиметричную систему. Однако эта асимметрия холостого хода трехстержневого трансформатора не имеет большого практического значения, так как уже при очень небольшой нагрузке она сглаживается.
Следовательно, при симметричных напряжениях на фазах первичной обмотки и симметричной нагрузке, подключенной к вторичной обмотке, все фазы трансформатора находятся в одинаковых условиях. Поэтому для анализа можно рассматривать работу только одной фазы, считая, что процессы в других фазах аналогичны. Для фазных напряжений и токов при симметричной нагрузке справедливы формулы, полученные для однофазного тока.
Обмотки трехфазных трансформаторов могут соединятся звездой и треугольником. При соединении обмоток звездой концы (начала) трех фаз соединяются между собой, образуя нейтральную, или нулевую точку, а свободные зажимы начал (концов) трех фаз подключаются к трем проводам сети источника (или приемника) электрической энергии переменного тока.
При соединении обмоток треугольником начало первой фазы соединяется с концом второй, начало второй фазы — с концом третьей, начало третьей фазы — с концом первой. Точки соединения начала одной фазы с концом другой подключаются к проводам трехфазной сети переменного тока.
Наибольшее распространение имеют соединения обмоток по схеме «звезда»  и «треугольник»
и «треугольник»  , причем первичные и вторичные обмотки могут иметь как одинаковые, так и различные схемы. Если при соединении обмоток «звездой» нулевая точка выводится, то такое соединение называют «звезда с нулем»
, причем первичные и вторичные обмотки могут иметь как одинаковые, так и различные схемы. Если при соединении обмоток «звездой» нулевая точка выводится, то такое соединение называют «звезда с нулем»  .
.
Самым простым и дешевым из них является соединение обеих обмоток трансформатора звездой (Y/Y), при котором каждая из обмоток и ее изоляция (при глухом заземлении нейтральной точки) должны быть рассчитаны только на фазное напряжение и линейный ток. Так как число витков обмотки трансформатора прямо пропорционально напряжению, то, следовательно, соединение обмоток звездой требует в каждой из обмоток меньшего количества витков, но большего сечения проводников с изоляцией, рассчитанной лишь на фазное напряжение.
Трехфазные трансформаторы обычно характеризуют двумя коэффициентами трансформации: фазным и линейным. Фазный коэффициент трансформации равен отношению числа витков фазы вторичной обмотки к числу витков фазы первичной обмотки или же отношению фазных напряжений этих обмоток в режиме холостого хода:

Линейный коэффициент трансформации равен отношению линейного напряжения вторичной обмотки к линейному напряжению первичной обмотки в режиме холостого хода:

При одинаковом способе соединения  . Однако при различном способе соединения
. Однако при различном способе соединения .
.
Сварочный трансформатор и автотрансформатор
Сварочный трансформатор — это аппарат, преобразующий переменное напряжение сети в переменное напряжение для сварки.
Для получения качественной сварки требуется устойчивое горение дуги, что наблюдается, если ток сварки почти нс изменяется. Поэтому внешняя характеристика сварочного трансформатора должна иметь круто падающий участок (рис. 6.10,а).
Для получения падающей характеристики и ограничения тока короткого замыкания необходимо при сварке включать последовательно с дугой большое сопротивление. На рис.6.10,б представлена схема сварочного трансформатора, в котором для формирования требуемой внешней характеристики трансформатора и для ограничения тока короткого замыкания последовательно с вторичной обмоткой трансформатора включена отдельная дроссельная катушка (дроссель). Электрическая дуга при сварке возникает между электродом 6 и свариваемой деталью 7.
 Рис. 6.10. Внешние характеристики (а) и схема (б) сварочного трансформатора
Рис. 6.10. Внешние характеристики (а) и схема (б) сварочного трансформатора
На магнитопроводе сварочного трансформатора находятся обмотка высокого напряжения 1 (первичная) и обмотка низкого напряжения 2 (вторичная). На сердечнике дросселя находится обмотка 3, включенная последовательно с обмоткой 2 трансформатора. Сердечник дросселя не сплошной, зазор 5 между сердечником и якорем 4 может изменяться.
При возбуждении дуги (при коротком замыкании) ток короткого замыкания, проходя через обмотку дросселя, создает мощный магнитный поток, наводящий в дросселе ЭДС самоиндукции, направленную против напряжения трансформатора. В результате вторичное напряжение трансформатора полностью поглощается падением напряжения в дросселе, и напряжение в сварочной цепи достигает почти нулевого значения.
При возникновении дуги величина сварочного тока уменьшается, что влечет за собой уменьшение ЭДС самоиндукции дросселя и в сварочной цепи устанавливается рабочее напряжение, необходимое для устойчивого горения дуги.
Изменением величины зазора между подвижной и неподвижной частями магнитопровода дросселя изменяется его магнитное сопротивление и, следовательно, сила тока в сварочной цепи. При уменьшении зазора магнитное сопротивление магнитопровода дросселя уменьшается, что приводит к возрастанию магнитного потока. В результате ЭДС самоиндукции катушки дросселя и ее индуктивное сопротивление увеличиваются, сила сварочного тока уменьшается.
При увеличении зазора сила сварочного тока возрастает.
Автотрансформатором называют трансформатор специального назначения, у которого обмотка низшего напряжения является частью обмотки высшего напряжения, т. е. цепи этих обмоток имеют не только магнитную, но и гальваническую связь.
В трансформаторах передача энергии из одной обмотки в другую осуществляется магнитным полем, энергия которого сосредоточена в магнитопроводе. В автотрансформаторах передача энергии осуществляется как магнитным полем, так и за счет электрической связи между первичной и вторичной обмотками.
В зависимости от включения обмоток автотрансформатора можно получить повышение или понижение напряжения (рис. 6.11).
 Рис. 6.11. Схема понижающего (а) и повышающего (б) автотрансформаторов
Рис. 6.11. Схема понижающего (а) и повышающего (б) автотрансформаторов
В нагрузочном режиме автотрансформатора ток в общей части обмотки равен разности первичного  и вторичного
и вторичного  токов (рис. 6.11). При коэффициенте трансформации
токов (рис. 6.11). При коэффициенте трансформации  , незначительно отличающемся от единицы, действующие значения токов
, незначительно отличающемся от единицы, действующие значения токов  почти одинаковы, их разность
почти одинаковы, их разность  мала по сравнению с каждым из них. Поэтому у автотрансформатора сечение провода, масса, габариты и потери меньше, чем у трансформатора той же мощности.
мала по сравнению с каждым из них. Поэтому у автотрансформатора сечение провода, масса, габариты и потери меньше, чем у трансформатора той же мощности.
Автотрансформаторы успешно конкурируют с двухобмоточными трансформаторами, когда их коэффициент трансформации  . При
. При  автотрансформаторы себя не оправдывают.
автотрансформаторы себя не оправдывают.
Существенным недостатком автотрансформатора является наличие гальванической связи между обмотками, что требует для обмотки нижнего напряжения изоляцию такую же, как и для обмотки высшего напряжения. Из условий электробезопасности нс допускается использовать автотрансформаторы для питания цепей низкого напряжения от высоковольтной сети.
Автотрансформаторы применяются при пуске мощных асинхронных и синхронных двигателей, при соединении высоковольтных сетей с разным напряжением. Маломощные автотрансформаторы используют в устройствах автоматики, электросвязи, радиоаппаратуре. Широкое распространение получил лабораторный автотрансформатор (ЛАТР), позволяющий плавно регулировать выходное напряжение.





Изучу , оценю , оплатите , через 2-3 дня всё будет на «4» или «5» !
Откройте сайт на смартфоне, нажмите на кнопку «написать в чат» и чат в whatsapp запустится автоматически.


 f9219603113@gmail.com
f9219603113@gmail.com


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.9219603113.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Источник статьи: http://9219603113.com/predmet-elektricheskie-mashiny/