Синхронные реактивные двигатели (СРД)
Введение
 Появление электрического двигателя во многом способствовало развитию промышленности и улучшению качества жизни населения. В рамках второй промышленной революции произошла популяризация всех видов электрических машин, и теперь для многих создается впечатление, что эти устройства всегда находились на службе у человечества. На сегодняшний день известно множество разновидностей электрических двигателей, от широко известных двигателей постоянного тока (ДПТ), асинхронных двигателей (АД), синхронных двигателей (СД) до шаговых двигателей (ШД). Несмотря на глобальные различные, все они выполняют одну функцию – являются электромеханическими преобразователями, то есть конвертируют электрическую энергию в механическую.
Появление электрического двигателя во многом способствовало развитию промышленности и улучшению качества жизни населения. В рамках второй промышленной революции произошла популяризация всех видов электрических машин, и теперь для многих создается впечатление, что эти устройства всегда находились на службе у человечества. На сегодняшний день известно множество разновидностей электрических двигателей, от широко известных двигателей постоянного тока (ДПТ), асинхронных двигателей (АД), синхронных двигателей (СД) до шаговых двигателей (ШД). Несмотря на глобальные различные, все они выполняют одну функцию – являются электромеханическими преобразователями, то есть конвертируют электрическую энергию в механическую.
А теперь представьте себе электрический двигатель с максимально простой конструкцией ротора. Это сделать довольно-таки сложно из-за сложившихся стереотипов о функционировании электрической машины, но именно так можно вкратце описать набирающие популярность Синхронные Реактивные Двигатели (с англ. Synchronous Reluctance Machine, СРД). В последнее время на эти электрические машины все больше обращают внимание производители двигателей, а также инжиниринговые компании по всему миру, и не случайно. Давайте разберемся, что же из себя представляют СРД.
Синхронный Реактивный Электродвигатель – синхронная машина, вращающий момент которой обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов – такое определение дает ГОСТ 27471-87.
Принцип работы синхронного реактивного двигателя
Переменный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается когда ротор пытается установить свою наиболее магнито — проводящую ось (d-ось) с приложенным к нему полем, чтобы минимизировать сопротивление в магнитной цепи. Иными словами, вращающееся магнитное поле статора увлекает за собой ротор. Амплитуда потока статора управляется через ось d, тогда как ток, отвечающий за момент управляется через ось q. Оси приведены к статору двигателя.
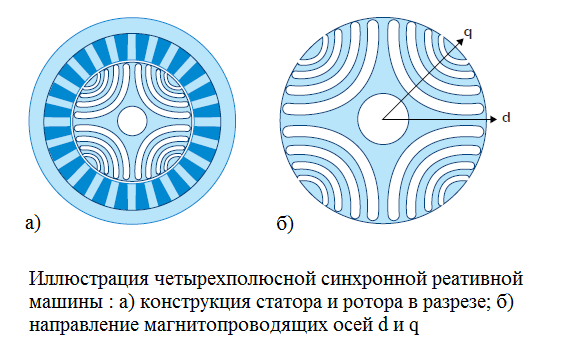
В рассмотренном исполнении ротора разницы между магнитными сопротивлениями осей добиваются за счет увеличения воздушного зазора по оси q. Амплитуда момента прямо пропорциональна разнице между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент. Математически это можно выразить с некоторыми допущениями, рассмотрев формулу электромагнитного момента для синхронной явнополюсной машины без возбуждения на роторе:
где m=3 для трехфазного исполнения статора, ω1- угловая скорость ротора, Xq -индуктивное сопротивление по оси q ротора, Xd — индуктивное сопротивление по оси d ротора, θ-угол между полем ротора и полем статора, характеризующий степень растянутости «магнитной пружины».
Таким образом, в отличие от синхронной машины с обмоткой возбуждения, синхронная реактивная машина в классическом представлении имела меньший момент, а также невысокий коэффициент мощности и коэффициент полезного действия (КПД). Объяснялось это значительным намагничивающим током статора, так как возбуждение происходит за счет реактивной составляющей тока. Пуск таких двигателей осуществлялся за счет демпфирующей короткозамкнутой обмотки, т.е. имел место асинхронный пуск синхронного двигателя. Но на сегодняшний день, СРД успешно эксплуатируются в комплекте с преобразователями частоты (ПЧ) YASKAWA GA700 и ПЧ GA500. Пуск происходит благодаря алгоритму, заложенному в ПЧ (управление током намагничивания id статора и током статора, отвечающим за момент iq), следовательно, необходимость асинхронного пуска устраняется. В итоге, коэффициент мощности и КПД у современных СРД заметно увеличился, а конструкция ротора стала максимально простой. В среднем у синхронных реактивных двигателей остается худший коэффициент мощности на 5-10% из-за принципиальных особенностей работы, но на 5- 8 % лучший КПД в сравнении с асинхронными двигателями как в номинальном режиме, так и при работе на всем диапазоне скоростей при регулировании скорости вниз от номинала.
Наибольший интерес у разработчиков систем электропривода вызвала конструкция СРД. Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой. То есть, статор двигателя идентичен статору широко используемого асинхронного двигателя.
Особенно интересен ротор, который представляет собой вал с болванкой из шихтованной стали. На роторе отсутствуют обмотки, а также постоянные магниты.
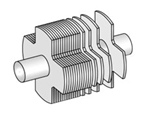
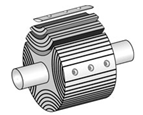
Выделяют три основных типа ротора реактивного двигателя: ротор с явно выраженными полюсами, аксиально-расслоенный ротор и поперечно-расслоенный ротор.
 а) Ротор с явно выраженными полюсами
а) Ротор с явно выраженными полюсами
 б) Аксиально-расслоенный ротор
б) Аксиально-расслоенный ротор
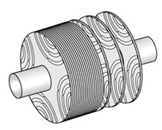 в) Поперечно-расслоенный ротор
в) Поперечно-расслоенный ротор
Отличительная особенность синхронных реактивных двигателей (СРД) — отсутствие в них возбуждения со стороны ротора. Основной магнитный поток в этом двигателе создается исключительно за счет вращающейся МДС обмотки статора.
Так как, СРД – синхронная машина, то его механическая характеристика в разомкнутой системе будет абсолютно жесткой.
Достоинства и недостатки синхронного реактивного двигателя:
Преимущества СРД:
1. Простота и надежность ротора, состоящего из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки;
2. Низкий нагрев. Так как в роторе нет обмоток, поэтому через него не протекает активный ток с выделением тепла. Это положительно сказывается на сроке жизни подшипников, а также на коэффициенте полезного действия системы. Так как снижаются потери на нагрев, то номинальный ток двигателя может быть завышен, что позволяет получить (при аналогичной мощности) более высокий момент (на 20-40%), чем у асинхронного двигателя.
3. Отсутствие магнитов. Из-за этого снижается конечная цена двигателя, так как при производстве не используются редкоземельные элементы.
4. Низкий момент инерции ротора. Так как ротор представляет собой болванку без магнитов и обмоток, которые увеличивают этот показатель в асинхронных двигателях и двигателях с постоянными магнитами. Соответственно, уменьшается типоразмер двигателей. Из чего вытекает следующее преимущество.
5. Меньшие габариты при той же мощности в сравнении с АД.
6. Высокий КПД и cosφ (косинус фи). При работе от сети, а такие двигатели в старых системах работали от сети и снабжались дополнительной пусковой обмоткой на роторе, СРД демонстрировали не лучшие энергетические показатели, но применяя специализированный преобразователь частоты, например, YASKAWA GA700 и GA500, разработанный для работы с синхронными реактивными двигателями, картина в корне меняется. В таких преобразователях происходит разделение между сетью и питающим напряжением двигателя, а программное обеспечение позволяет корректировать выходной ток, создавая наиболее благоприятные условия работы двигателя (в GA700 режим EZOLV). Таким образом СРД оставляет за собой все преимущества, описанные выше, избегая недостатков возникавших ранее при работе от сети. Если все – таки происходит снижение коэффициента мощности, это может означать, что для данного применения должен быть выбран преобразователь на больший номинальный ток.
7. Абсолютно жесткая механическая характеристика в разомкнутой системе. Это говорит о том, что двигатель способен поддерживать скорость на заданном уровне с большой точностью, до тех пор, пока момент не превысит максимальное значение.
Недостатки СРД:
1. Пуск и работа СРД возможны только от преобразователя частоты. Бездатчиковая система управления отслеживания положения ротора является необходимым условием работы синхронного реактивного двигателя. Преобразователь в каждый момент времени отслеживает потребляемый ток двигателя, так как при повороте вала изменяется магнитное сопротивление в зазоре, и формирует магнитное поле в соответствии с этим изменением, добиваясь высокой производительности.
2. Низкий коэффициент мощности при работе с ослаблением поля. СРД демонстрируют лучшие энергетические показатели при работе в зоне насыщения. При выходе на повышенную скорость, необходимо уменьшить ток намагничивания машины id, в результате чего, заметно упадет момент двигателя, а коэффициент мощности резко снизится в следствие потребления большего реактивного тока. Поэтому для применений в которых осуществляется работа на повышенных скоростях такие двигатели лучше не использовать.
Заключение:
Синхронные реактивные двигатели являются перспективным направлением для интеграции в новые системы и для модернизации старых систем электропривода. Больший КПД на всем диапазоне скоростей в сравнении с СДПМ и АД способствует в пользу выбора этого двигателя при разработке новых систем, соответствующих международному стандарту энергоэффективности IE4. Простота конструкции ротора и проверенная технология изготовления статора позволяют такому двигателю легко найти свое применение в насосных агрегатах и вентиляторах, а также в применениях с постоянным моментом и регулированием скорости вниз от номинала. Единственной проблемой такого двигателя является потребление большего реактивного тока в сравнении с асинхронными двигателями, но при использовании частотного преобразователя YASKAWA GA700 и GA500 этот недостаток легко устраняется.
Источник статьи: http://www.cospa.ru/news/publications/sinkhronnye-reaktivnye-dvigateli-srd/
Синхронный реактивный двигатель
Возможно, название этой статьи кого-то наведёт на мысль, что речь пойдёт об электрическом реактивном двигателе для космических кораблей. Однако всё гораздо прозаичнее: СРД — это один из видов синхронных электродвигателей, и слово «реактивный» в его наименовании означает не вид тяги, а принцип приведения ротора во вращение. Более точно его описывает англоязычное название synchronous reluctance machine (одно из значений слова reluctance — «магнитное сопротивление»).
Известно множество разновидностей электрических двигателей, включая асинхронные (АД), синхронные (СД), шаговые, двигатели постоянного тока. Все они представляют собой электромеханические преобразователи, то есть преобразователи электрической энергии в механическую.
А теперь представьте себе АД с максимально простой конструкцией ротора — это и будет СРД. Подобные электрические машины появились несколько десятилетий назад, но только недавно привлекли внимание производителей двигателей, а также инжиниринговых компаний по всему миру.
Если раньше в электроприводе важно было обеспечить должный крутящий момент или оптимальный размер оборудования, то теперь на первый план вышла энергоэффективность. В СРД реактивная сила возникает в результате изменения магнитного сопротивления, и их производители ради повышения энергоэффективности применили роторные элементы специальной конструкции, управляющие силовыми линиями магнитного поля.
ПРИНЦИП ПРОСТ
Согласно определению, содержащемуся в ГОСТе от 1987 года, СРД — это синхронная машина, вращающий момент которой обусловлен неравенством магнитных проводимостей по разным осям ротора, не имеющего обмоток возбуждения или постоянных магнитов. В данном случае под осями понимаются линии симметрии ротора на его поперечном разрезе (см. схему).
Переменный ток, проходящий по обмоткам статора, создаёт в воздушном зазоре внутри электродвигателя вращающееся магнитное поле. Крутящий момент возникает, поскольку ротор пытается линию с наименьшей магнитной проводимостью (ось d) совместить с вектором приложенного к нему поля, чтобы минимизировать сопротивление в магнитной цепи. Иными словами, вращающееся магнитное поле статора увлекает за собой ротор. Глядя на схему как на векторную диаграмму, можно сказать, что величина магнитного потока статора отражается на оси d, тогда как электрический ток, отвечающий за вращающий момент, — на оси q.
Конструкторы подобных роторов обеспечили различие между магнитными сопротивлениями по разным осям за счёт воздушных зазоров. Значение вращающего момента здесь прямо пропорционально разнице индуктивностей обмоток статора, ориентированных вдоль осей d и q.
ПО ПУТИ К СОВЕРШЕНСТВУ
СРД прошли впечатляющий эволюционный путь. Первые образцы развивали меньший вращающий момент, чем синхронные машины с обмоткой возбуждения, а также имели невысокие КПД и коэффициент мощности. Это объяснялось тем, что возбуждение обуславливалось реактивной составляющей тока, которая имела большую величину. Для пуска таких двигателей применяли демпфирующую короткозамкнутую обмотку, переводя их на время пуска в асинхронный режим.
Характеристики СРД резко повысились после появления специальных преобразователей частоты (ПЧ). В них питающее напряжение развязано от сети и заложен алгоритм пуска (управление током намагничивания Id статора и током статора, отвечающим за крутящий момент, — Iq), исключающий необходимость в асинхронном разгоне. Во время работы СРД программа контроллера ПЧ постоянно корректирует выходной ток, поддерживая наиболее благоприятные режимы. Положение ротора отслеживается без применения встроенных датчиков — по потребляемому двигателем току.
После внедрения ПЧ коэффициент мощности и КПД синхронных реактивных двигателей заметно увеличились, а конструкция ротора максимально упростилась. В целом можно сказать, что в силу своего принципа действия СРД имеет худший на 5-10% коэффициент мощности, чем АД, но зато на 5-8% выигрывает в КПД — как в номинальном режиме, так и при работе на пониженных скоростях во всём допустимом их диапазоне.
Статор СРД идентичен статору широко используемого асинхронного двигателя. Его обмотка может быть распределённой или сосредоточенной. А ротор представляет собой вал с болванкой из шихтованной стали — на нём вы не найдёте ни обмоток, ни постоянных магнитов. Роторы бывают трёх основных видов: аксиально расслоённые, поперечно расслоённые и с явно выраженными полюсами (см. рисунок).
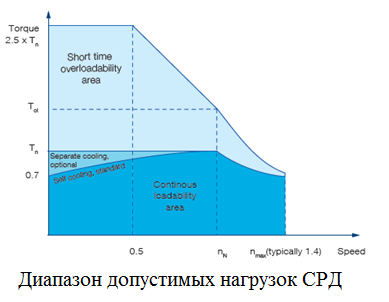
ТИХОХОДЫ ПО ПРИРОДЕ
Отметим, что СРД демонстрируют высокие энергетические показатели тогда, когда магнитопровод работает в зоне насыщения. В случае повышенных оборотов контроллер должен уменьшить ток намагничивания Id, в результате чего заметно падает вращающий момент двигателя. А поскольку реактивный ток сохраняется на высоком уровне, резко снижается коэффициент мощности. Поэтому там, где требуются повышенные скорости работы, синхронные реактивные двигатели использовать не стоит.
Назовём достоинства СРД.
1. Простота и надёжность ротора, состоящего из тонколистовой электротехнической стали.
2. Низкий нагрев. Так как в роторе нет обмоток, через него не протекает активный ток. Это положительно сказывается на сроке жизни подшипников и на КПД. Поскольку снижаются потери на нагрев, номинальный ток двигателя может быть повышен, что позволяет получить (при той же мощности) более высокий (на 20-40%) вращающий момент, чем у АД.
3. Отсутствие магнитов. Таким образом, для производства двигателя не требуются редкоземельные металлы и, следовательно, его стоимость снижается.
4. Низкий момент инерции ротора, который представляет собой болванку без магнитов и обмоток.
5. Меньшие габариты по сравнению с АД при той же мощности.
6. Высокие КПД и cos(φ), достигаемые с помощью специализированного интеллектуального преобразователя частоты.
7. Абсолютно жёсткая механическая характеристика в разомкнутой системе. Это значит, что двигатель способен поддерживать скорость на заданном уровне с большой точностью до тех пор, пока вращающий момент не превысит максимального значения.
Недостатки же СРД таковы.
1. Пуск и работа возможны только с преобразователем частоты, который увеличивает стоимость системы и занимает место.
2. Падение эффективности на повышенных оборотах.
Синхронные реактивные двигатели перспективны для применения при разработке новых и модернизации старых систем электропривода. Больший КПД во всем диапазоне скоростей в сравнении с АД и СД с постоянными магнитами дает им преимущество при выборе двигателей для новых систем, соответствующих международным стандартам энергоэффективности IE4 и IE5. Благодаря простоте конструкции ротора и проверенной технологии изготовления статора такие двигатели найдут применение в насосных агрегатах и вентиляторах, а также в различных других системах с постоянным моментом вращения и регулированием скорости вниз от номинала.
Источник статьи: http://zen.yandex.ru/media/energovector/sinhronnyi-reaktivnyi-dvigatel-5f4573b95f85153dff48c0f1