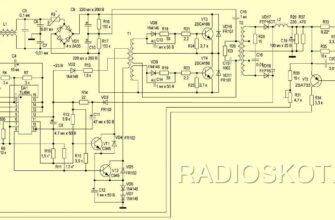
Устройство, схема которого приведена ниже, используется для обнаружения утечек газа. Датчик реагирует на метан, этанол, водород, изобутан. Этот список можно изменить, просто применив другой датчик в схеме. Товарищи из конторы Figaro производят кучу различных датчиков, реагирующих на различные газы. Схема устройства вот такая (чтобы получить большую схему, надо нажать на маленькую):
Пробежимся быстренько по функциональным узлам схемы. Итак, сам датчик SE1 представляет собой пластинку с неким окислом, которая подогревается встроенным нагревателем. В чистом воздухе сопротивление датчика равно приблизительно 10 кОм. При возникновении в воздухе частиц газа, сопротивление датчика начинает падать — тем сильнее, чем больше концентрация газа. При достижении определенного порога компаратор на микросхеме DA2 меняет свое состояние и начинает работать генератор DD1.1. В связи с чем, моргает светодиод HL2 и пищит страшным писком зуммер SP. Узел на DD1.3 обеспечивает задержку включения устройства примерно на 2 минуты. Связано это с тем, что нагревателю датчика необходимо время на то, чтобы нагреться и придти в себя. Индикатор HL3 загорается как раз по истечении 2 минут и сигнализирует о готовности датчика к работе. Питается все это дело от стабилизированного источника напряжением 5 вольт на микросхеме DA1.
Источник статьи: http://www.radiokot.ru/circuit/digital/home/05/
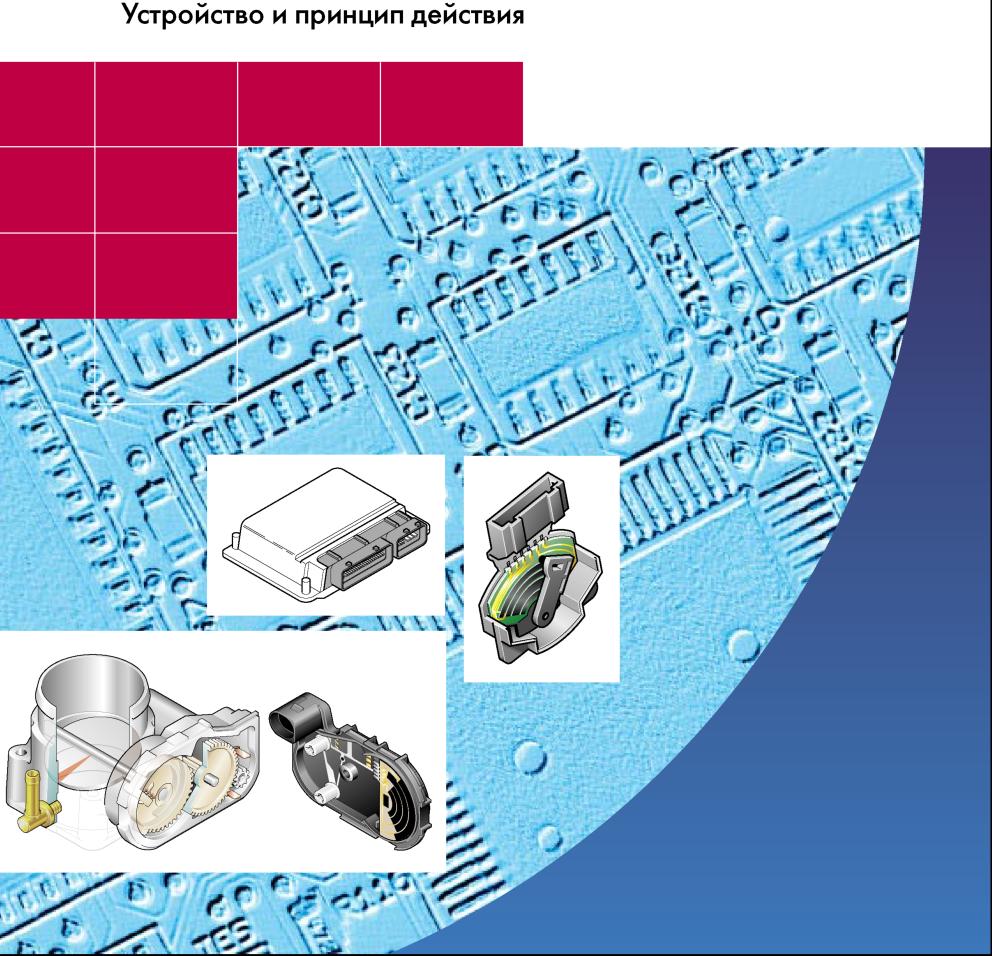
Устройство и принцип действия Электронной педали газа
Устройство и принцип действия
При электронном приводе акселератора перемещение дроссельной заслонки осуществляется при помощи электродвигателя. При этом отпадает необходимость в традиционной механической связи между педалью акселератора и дроссельной заслонкой.
Это означает, что намерение водителя с педали акселератора передается в блок управления. Затем осуществляется перемещение дроссельной заслонки.
Благодаря этому блок управления может посредством перемещения дроссельной заслонкой влиять на величину крутящего момента двигателя даже в том случае, когда водитель не меняет положения педали акселератора.
Это дает возможность достижения лучшей координации между системами двигателя.
Ниже Вы увидите, что электронный привод акселератора — это значительно больше, чем простая замена механического привода.
Программа самообучения не является руководством по ремонту!
Указания по проведению контрольных, регулировочных и ремонтных работ приведены в соответствующей технической литературе по ремонту.
Перемещение дроссельной заслонки
Механическое перемещение дроссельной заслонки
Водитель нажимает педаль акселератора, и через тягу акселератора усилие непосредственно передается на дроссельную заслонку и вызывает ее перемещение.
Электронное управление двигателем при этом не имеет никакой возможности повлиять на положение дроссельной заслонки.
Чтобы изменить крутящий момент двигателя, необходимо воздействовать на другие параметры режима двигателя, например, на момент зажигания и впрыска топлива.
Только в режиме холостого хода и при действии круиз-контроля осуществляется электронное регулирование работой двигателя.
В этом случае перемещение дроссельной заслонки по всему пути происходит при электронном управлении и электрическом приводе.
Водитель в соответствии с его намерениями по изменению мощности двигателя нажимает педаль акселератора. Положение педали отслеживается датчиками, и соответствующие сигналы передаются блоку управления двигателя. Далее происходит перемещение дроссельной заслонки в соответствии с намерениями водителя.
Если же появляется необходимость изменения крутящего момента двигателя по причинам обеспечения безопасности движения или экономии топлива, блок управления двигателя может изменить положение дроссельной заслонки без изменения водителем положения педали акселератора.
Достоинство такого регулирования состоит в том, что блок управления определяет положение дроссельной заслонки в соответствии с пожеланиями водителя, экологическими требованиями, необходимостью обеспечения безопасности движения и снижения расхода топлива.
Регулирование крутящего момента двигателя посредством механического привода дроссельной заслонки
Различные сигналы, касающиеся величины крутящего момента двигателя, поступают в блок управления двигателя и там обрабатываются. Однако оптимальной величины крутящего момента получить не удается, поскольку блок управления двигателя не может оказать прямого воздействия на дроссельную заслонку, управляемую механически педалью акселератора.
Регулирование крутящего момента двигателя посредством электронного управления дроссельной заслонкой
В этом случае возможно достижение оптимального значения крутящего момента посредством электронного регулирования работой двигателя.
Как это происходит?
Блок управления двигателем суммирует все внешние и внутренние требования в отношении величины крутящего момента двигателя и по ним рассчитывает необходимую величину момента.
Это намного точнее и эффективнее, чем было прежде.
Внутренние требования предъявляются со
— условий пуска двигателя;
— регулирования холостого хода;
— ограничения частоты вращения;
— регулирования состава смеси по содержанию кислорода в отработавших газах.
Внешние требования предъявляются со
— автоматической коробки передач (в точках переключения);
— тормозной системы (контроль тяги, режим принудительного холостого хода);
— климатической установки (включение и выключение компрессора);
«Инструментами» управления двигателем в части крутящего момента двигателя являются дроссельная заслонка, давление наддува, момент впрыска топлива, отключение цилиндров и момент зажигания.
После оценки всех внутренних и внешних требований в отношении величины крутящего момента блок управления двигателя рассчитывает оптимальный крутящий момент двигателя.
Фактический крутящий момент определяется расчетом по частоте вращения двигателя, сигналу о нагрузке двигателя и моменту зажигания.
В ходе регулирования блок управления двигателя сначала сравнивает фактический крутящий момент с оптимальным моментом. Если эти величины не совпадают, блок управления двигателя расчетом определяет направление и величину необходимого воздействия в целях достижения совпадения фактического и оптимального крутящего момента.
Для этого у блока управления есть два пути.
Блок управления двигателем
Оптимальный крутящий момент
На одном пути регулированию подлежат параметры, которые влияют на наполнение цилиндров. При этом речь идет о параметрах, изменение которых относительно долго влияет на направление изменений крутящего момента двигателя.
На втором пути изменению подлежат параметры, которые относительно быстро изменяют величину крутящего момента вне зависимости от наполнения цилиндров.
К этим параметрам относятся:
угол открытия дроссельной заслонки и на двигателях с турбонаддувом давление наддува.
момент зажигания; момент впрыска топлива; отключение цилиндра(ов).
На последующих страницах Вы найдете описание электропривода дроссельной заслонки.
Электронный привод дроссельной заслонки состоит из:
посредством датчиков непрерывно определяет положение педали акселератора и передает соответствующий сигнал блоку управления двигателя.
Блок управления двигателя
определяет по этому сигналу намерение водителя в отношении изменения мощности двигателя и отвечает на это соответствующим изменением крутящего момента двигателя. Для этого блок управления подает управляющий сигнал приводу дроссельной заслонки для приоткрытия ее или, наоборот, некоторого закрывания. При этом принимаются во внимание другие пожелания в отношении крутящего момента двигателя, например, со стороны климатической установки.
В этом и состоит смысл «электронного привода акселератора» (дроссельной заслонки).
Модуль управления дроссельной заслонки
обеспечивает требуемую массу воздуха, поступающего в цилиндры.
Привод дроссельной заслонки воздействует на дроссельную заслонку в соответствии с командами блока управления двигателя. О положении дроссельной заслонки постоянно поступают сигналы от угловых датчиков положения дроссельной заслонки в блок управления двигателя.
сигнализирует водителю, что в системе электронного привода имеется неисправность.
Действие электронного привода
На холостом ходу
Блок управления двигателем узнает по сигналам от датчиков положения педали акселератора, что педаль не нажата. Начинается режим регулирования холостого хода.
Модуль педали акселератора
положения педали акселератора
Блок управления двигателем управляет приводом дроссельной заслонкой; при помощи электродвигателя дроссельная заслонка перемещается.
В зависимости от того, насколько различаются фактическая и оптимальная величины частоты вращения двигателя, зависит величина изменения угла открытия дроссельной заслонки.
В регулировании холостого хода участвует также цифровая система стабилизации холостого хода.
Оба угловых датчика положения дроссельной заслонки непрерывно передают информацию блоку управления двигателя. Датчики расположены в модуле управления дроссельной заслонкой.
Перемещение педали акселератора
Блок управления двигателя из сигналов от датчиков положения педали акселератора получает информацию о положении педали. Желаемое водителем перемещение дроссельной заслонки осуществляется по команде блока управления посредством привода дроссельной заслонки. Дополнительно поступают соответствующие команды по изменению момента зажигания, впрыска и, при необходимости, величины давления наддува.
Оба угловых датчика определяют положение дроссельной заслонки и сообщают о нем блоку управления.
Для расчета необходимого положения дроссельной заслонки блоком управления принимаются во внимание дополнительные требования.
— по ограничению частоты вращения двигателя;
— со стороны круиз-контроля (GRA);
— со стороны системы контроля тяги (ASR);
— со стороны регулирования принудительного холостого хода (MSR).
Если в конечном счете это все отражается в необходимости изменения крутящего момента, может быть изменено положение дроссельной заслонки без какого-либо воздействия водителя на педаль акселератора.
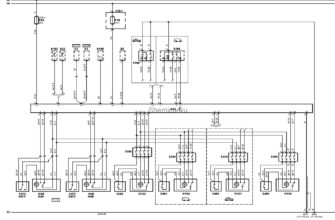
Блок управления двигателя J.
Выключатель по положению педали сцепления F36
Модуль управления дроссельной заслонки J338
Привод дроссельной заслонки G186
Контрольная лампа электронного привода акселератора K132 Electronic Power Control)
Состав компонентов системы в зависимости от ее исполнения может быть иным.
Модуль педали акселератора с датчиком 1
положения педали акселератора G79 и с датчиком 2 положения педали акселератора G185
Модуль управления дроссельной заслонки J338 с угловым датчиком 1 привода дроссельной заслонки G187
и угловым датчиком 2 привода дроссельной заслонки G188
Выключатель сигналов торможения F и
выключатель по положению тормозной педали F47
Дополнительные сигналы от:
— автоматической коробки передач;
— круиз-контроля и другие.
Блок управления двигателя J..
Назначение блока управление двигателем при электронном приводе акселератора
Блок управления двигателя определяет по входным сигналам от датчиков положения педали акселератора намерение водителя по изменению мощности двигателя и реализует его посредством исполнительных механизмов путем изменения крутящего момента двигателя. При этом принимаются во внимание другие параметры управления двигателем (например, ограничения частоты вращения и мощности) и требования со стороны различных систем автомобиля (например, тормозной системы или автоматической коробки передач).
Одновременно под контролем во избежание сбоев находится система «электронного привода акселератора».
Контрольный вычислительный модуль
В нескольких словах, блок управления двигателя состоит из двух вычислительных модулей, функционального и контрольного.
получает сигналы от датчиков,
обрабатывает их и осуществляет управление исполнительными устройствами. Дополнительно функциональный модуль проверяет работу контрольного модуля.
осуществляет исключительно только постоянный контроль функционального модуля.
Контрольный модуль осуществляет непрерывный контроль функционального модуля.
На основе собственных расчетов контрольный модуль проверяет выходные сигналы функционального модуля.
Дополнительно осуществляется проверка обоих модулей посредством функции «вопрос-ответ».
Если опознан сбой в работе, оба вычислительных модуля могут независимо друг от друга посредством воздействия на модуль управления дроссельной заслонки, зажигание и впрыск топлива остановить двигатель.
Функциональный вычислительный модуль
рассчитывает управляющие воздействия
Контрольный вычислительный модуль
Проверка контрольным модулем функционального модуля посредством функции «вопрос-ответ»
Контрольный модуль направляет функциональному модулю запрос, например, о частоте вращения или о моменте зажигания. Правильность полученного ответа проверяется контрольным модулем. При неправильном ответе производится ввод ошибки в счетчик ошибок контрольного модуля.
После пяти неправильных ответов двигатель останавливается.
Опознание пяти неправильных ответов длится менее полсекунды.
Для проверки контрольного модуля функциональный модуль намеренно посылает неправильный ответ.
Если контрольный модуль опознает, что ответ неправильный, это заносится в счетчик ошибок, и сообщение об этом передается функциональному модулю.
Если контрольный модуль не опознает, что ответ неправильный, это заносится в счетчик ошибок функционального модуля.
При пяти неопознанных неправильных ответах двигатель останавливается.
Функциональный модуль не посылает никакого ответа или отвечает слишком поздно
В этом случае двигатель тотчас останавливается.
Функциональный вычислительный модуль
Контрольный вычислительный модуль
Модуль педали акселератора состоит из:
— датчика 1 положения педали акселератора G79 и
— датчика 2 положения педали акселератора G185.
Используются два одинаковых датчика для обеспечения максимально возможной надежности.
Здесь речь идет о резервированной системе. Это означает, что вполне было бы достаточно информации от одного датчика.
Разрез корпуса модуля педали акселератора с датчиками G79 и G185
Посредством сигналов от обоих датчиков положения педали акселератора блок управления двигателя узнает положение педали в каждый момент времени.
Оба датчика представляют собой потенциометры со скользящим контактом, укрепленным на общем валу. При каждом изменении положения педали изменяется сопротивление датчиков и, соответственно, напряжение, которое передается на блок управления двигателя.
Дорожка для контакта
По сигнальному напряжению опознаются режимы кик-дауна и холостого хода. Выключатель режима холостого хода расположен в модуле управления дроссельной заслонки.
Датчик 1 положения педали акселератора
Датчик 2 положения педали акселератора
Работа при отсутствии сигнала(ов)
При отсутствии одного сигнала
— Это вносится в регистратор неисправностей, и включается контрольная лампа электронного привода акселератора.
— Система управляется сначала на холостом ходу. Когда будет опознан второй датчик в ходе определенного контрольного срока на режиме холостого хода, опять будет возможно движение автомобиля.
— При полном нажатии на педаль частота вращения двигателя увеличивается медленно.
— Дополнительное опознавание холостого хода по положению педали осуществляется посредством выключателя сигналов торможения F или выключателя по положению тормозной педали F47.
— Комфортные функции, например, круиз-контроль или регулирование двигателем в режиме принудительного холостого хода, отключаются.
При отсутствии обоих сигналов
Это вносится в регистратор неисправностей, и включается контрольная лампа электронного привода акселератора.
— Двигатель работает только на повышенных оборотах холостого хода (максимально 1500 об/мин) и не реагирует на педаль акселератора. При некоторых исполнениях системы управления двигателем может так случиться, что одновременный выход из строя двух датчиков не будет точно опознан.
— Контрольная лампа не включится.
— Двигатель работает на повышенных оборотах холостого хода и не реагирует на педаль акселератора.
На оба потенциометра подается напряжение 5 вольт.
Каждый датчик для обеспечения надежности имеет свой провод питания (красный), свой провод соединения с «массой» (коричневый) и свою сигнальную линию (зеленый провод).
В датчике G185 установлено нагрузочное сопротивление. Благодаря этому получают две различные характеристики для обоих датчиков. Это необходимо для обеспечения надежности и осуществления проверки.
В соответствующем блоке замеряемых параметров сигнал датчиков показывается в процентах. Это значит, что 100% = 5 вольт.
Модуль управления дроссельной заслонки J338
расположен на впускной трубе. Он служит для обеспечения подачи нужного количества воздуха в цилиндры.
Модуль состоит из:
корпуса дроссельной заслонки; дроссельной заслонки;
Угловые датчики 1 и 2 привода дроссельной заслонки
Крышка корпуса со встроенной электроникой
Модуль управления дроссельной заслонки нельзя ни вскрывать, ни ремонтировать. После замены модуля управления дроссельной заслонки следует провести установку исходного положения.
Открытие и закрытие дроссельной заслонки осуществляется электродвигателем по сигналу блока управления двигателя.
Оба угловых датчика посылают сигналы блоку управления двигателя о положении дроссельной заслонки.
Два датчика установлены в целях повышения надежности системы.
Угловые датчики 1 и 2 привода дроссельной Блок управле- заслонки
Оба датчика имеют общий провод питания (красный) и общий провод соединения с «массой» (коричневый). Каждый датчик имеет свою сигнальную линию (зеленый провод).
Привод дроссельной заслонки управляется по направлению движения (синий провод).
Привод дроссельной заслонки G186
Привод дроссельной заслонки представляет собой электродвигатель, управляемый блоком управления двигателя. Привод через передаточный механизм перемещает дроссельную заслонку.
Осуществляется плавное перемещение от положения холостого хода до положения полного газа. Передаточный механизмь
Положения дроссельной заслонки Дроссель
— Нижний механический ограничитель
В этом положение дроссельная заслонка закрыта. Этот ограничитель необходим для установки исходного положения модуля управления дроссельной заслонки.
Привод дроссельной заслонки
— Нижний электронный ограничитель
определяется блоком управления двигателя и находится несколько выше нижнего механического ограничителя.
При работе двигателя дроссельная заслонка закрывается до нижнего электронного ограничителя. Этим предотвращается соприкосновение дроссельной заслонки с корпусом.
Привод дроссельной заслонки в крышке корпуса модуля управления дроссельной заслонки
При обесточенном приводе дроссельной заслонки она посредством возвратной пружины перемещается в аварийное положение. В этом положении допускается весьма ограниченное по возможностям движение автомобиля при повышенной частоте вращения холостого хода.
Волновые колебания дроссельной заслонки
— Верхний электронный ограничитель
определяется блоком управления двигателя. Он, однако, не влияет на поведение двигателя, поскольку лежит в зоне «волновых колебаний» дроссельной заслонки.
— Верхний механический ограничитель
расположен над верхним электронным ограничителем. Он, однако, воздействует не на мощность движения, так как лежит в зоне „волновых колебаний» дроссельной заслонки.
Вал дроссельной заслонки
Работа при выходе из строя привода дроссельной заслонки
При выходе из строя привода дроссельной заслонки дроссельная заслонка автоматически перемещается в аварийное положение.
— Это вносится в регистратор неисправностей, — Комфортные функции отключены и включается контрольная лампа (например, круиз-контроль).
электронного привода акселератора.
В распоряжении водителя еще остаются возможности аварийного управления.
Угловой датчик 1 привода дроссельной заслонки G187 и
Оба датчика представляют собой потенциометры со скользящим контактом.
Скользящие контакты укреплены на шестерне, которая сидит на валике дроссельной заслонки. Контакты касаются дорожек потенциометров в крышке корпуса.
Угловые датчики 1 и 2
При изменении положения дроссельной заслонки изменяются сопротивления дорожек потенциометров и, тем самым, сигнальные напряжения, которые передаются блоку управления двигателя.
Графики обоих потенциометров направлены навстречу друг другу. Благодаря этому блок управления двигателя может отличать потенциометры один от другого и осуществлять проверочные функции.
Скользящие контакты Гра ф ики
Схема потенциометров со скользящим контактом
В соответствующем блоке замеряемых параметров сигнал датчиков показывается в процентах. Это означает, что 0% соответствует нижнему механическому ограничителю, 100% — верхнему электронному ограничителю.
Работа при отсутствии сигналов
Если блок управления двигателя получает от одного из угловых датчиков неразличимый сигнал или вообще не получает никакого сигнала:
— Это вносится в регистратор неисправностей, и включается контрольная лампа электронного привода акселератора.
— Подсистемы, которые в какой-то степени определяют крутящий момент (например, круиз-контроль, регулирование двигателя
в режиме принудительного холостого хода) отключаются.
Если блок управления двигателя получает от обоих угловых датчиков неразличимые сигналы или вообще не получает никаких сигналов:
— Это вносится в регистратор неисправностей, и включается контрольная лампа электронного привода акселератора.
— Привод дроссельной заслонки отключается.
— Двигатель работает только с повышенной частотой холостого хода 1500 об/
мин и больше не реагирует на педаль акселератора.
— Для контроля оставшегося датчика используется сигнал нагрузки.
Педаль акселератора действует нормально.
электронного привода акселератора K132 находится на щитке приборов. Эта лампа желтого цвета с надписью «EPC».
EPC — это сокращение английского термина Electronic Power Control (электронное управление двигателем, или, что то же самое, электронный привод акселератора).
Когда загорается лампа?
После включения зажигания лампа загорается на 3 секунды. Если не было никакой неисправности в регистраторе неисправностей, и за эти 3 секунды не была опознана неисправность, лампа гаснет.
При возникновении неисправности в системе блок управления двигателя включает лампу, а в регистратор неисправностей вносится неисправность.
Сигнал на лампу от блока управления двигателя поступает непосредственно через потенциал корпуса (коричневый провод).
Работа при выходе из строя
Неисправность лампы не оказывает никакого
влияния на действие электронного привода
акселератора, но эта неисправность вносится в
Однако в этом случае невозможно по лампе
узнать о возникновении неисправности в
Оба датчика находятся в едином узле на тормозной педали.
Сигнал «Тормозная педаль нажата» используется электронным приводом акселератора в двух целях.
Сигнал «Тормозная педаль нажата»:
— ведет к отключению круиз-контроля;
— используется для введения режима холостого хода, когда один из датчиков положения педали акселератора вышел из строя.
Работа при отсутствии сигнала
Когда один из датчиков выйдет из строя или сигналы опознаются как неразличимые,
блок управления двигателя предпринимает следующие действия:
— комфортные функции, например, круиз-контроль, отключаются;
— если к тому же неисправен один из датчиков положения педали акселератора, двигатель работает на повышенных оборотах холостого хода.
Выключатель по положению тормозной педали F47 служит для повышения надежности системы в качестве второго источника информации для блока управления двигателем.
Выключатель сигналов торможения F в начальном положении разомкнут и питается от клеммы «30».
Выключатель сигналов торможения F в начальном положении замкнут и питается от клеммы «15».
Выключатель сигналов торможения F и выключатель по положению тормозной педали F47
Выключатель в начальном положении замкнут и питается от клеммы «15».
Выключатель по положению педали сцепления F36 Использование сигнала
По сигналу от выключателя по положению педали сцепления блок управления двигателя опознает выжатое положение педали сцепления. При этом отключаются круиз-контроль и регулирование изменением нагрузки двигателя.
Работа при отсутствии сигнала
Выключатель по положению педали сцепления не находится под контролем самодиагностики. Замена сигнала от него не предусмотрена.
Выключатель сигналов торможения
Выключатель по положению педали сцепления Выключатель по положению тормозной педали
Датчик 1 положения педали акселератора G185 Датчик 2 положения педали