- Блог судового электромонтажника
- Монтаж электрических проводок и узлов автоматики на судне. В помощь судовому электромонтажнику. Монтаж проводок систем автоматизации на суше и в море.
- Электроприводы рулевых и подруливающих устройств. Общие сведения и системы
- 1-48 / 8. Рулевой электропривод. Требования и принцип построения
- Глава 2. Рулевые электроприводы.
Блог судового электромонтажника
Монтаж электрических проводок и узлов автоматики на судне. В помощь судовому электромонтажнику. Монтаж проводок систем автоматизации на суше и в море.
Электроприводы рулевых и подруливающих устройств. Общие сведения и системы
Наиболее ответственным из судовых электроприводов является рулевой привод. От его качества зависят маневренность судна и безопасность плавания. Поэтому Правилами Речного Регистра к рулевым электроприводам предъявляются особые требования, которые необходимо выполнять при проектировании и постройке.
К числу этих требований относятся: перекладка руля с борта на борт на угол -35°-0-+35° за время не более 30 с; число включений не менее 350 в час; вращающий момент на валу от 0 до 200 % номинального; стоянка под током в нагретом состоянии в течение 1 мин (только для электромеханических рулевых приводов); непрерывная перекладка руля с борта на борт в течение 30 мин при наибольшей скорости и полной осадке судна.
Для электрических приводов рулевых устройств должны быть выполнены также следующие требования: пусковые устройства должны обеспечивать повторный автоматический пуск электродвигателей при восстановлении напряжения; световая сигнализация должна указывать на наличие напряжения в цепи питания рулевого привода, его перегрузки и отключения; конечные выключатели должны ограничивать перекладку руля на левый и правый борт и не препятствовать перекладке в обратном направлении; питание электроэнергии должно быть предусмотрено от двух источников с автоматическим переключением: защита электродвигателей — только от токов короткого замыкания.
Для резервных рулевых приводов требования несколько иные, а именно: время перекладки руля с борта на борт на 20° — не более 60 с при полной осадке судна и скорости переднего хода, равной 0,6 наибольшей: продолжительность работы источника питания резервного электропривода должна быть не менее 15 мин.
Рулевые приводы должны обладать большой надежностью, простотой обслуживания, малыми габаритными размерами и массой, возможностью быстрого перехода с основного на резервное управление, не превышающего 10 с.
Классификация судовых электроприводов рулевых устройств может быть проведена по следующим признакам:
по типу передаточного механизма — с механической передачей и с гидравлической передачей. Привод с механической передачей может быть винтовой, получивший ограниченное применение на судах с малыми размерами румпельного отделения, и секторный с электродвигателем, соединенным с баллером руля зубчатым или червячным редуктором, находящимся в румпельном отделении. Привод с гидравлической передачей получает преимущественное распространение на вновь строящихся судах и может быть с насосом постоянной подачи и изменением направления движения жидкости реверсивными золотниками, с насосом переменной подачи;
по способу питания электродвигателя — с питанием непосредственно от судовой сети и с питанием от специального преобразователя (система Г —Д);
по характеру действия системы — простого, следящего и автоматического действия. У привода простого действия положение рукоятки не связано с положением руля или насадки, поэтому такие рукоятки снабжают возвратной пружиной, обеспечивающей их возврат в нулевое положение. Часто приводы простого действия имеют кнопочное управление. У приводов следящего действия положение руля соответствует определенному положению рукоятки или штурвала поста управления. Приводы автоматического управления снабжены специальными датчиками, перекладывающими руль автоматически, как только судно отклонится от заданного курса (авторулевой).
Источник статьи: http://electricity4engineer.blogspot.com/2016/12/electric-drives-for-steering-and-thrusters.html
1-48 / 8. Рулевой электропривод. Требования и принцип построения
8. Рулевой электропривод. Требования и принцип построения.
Руль, рулевая машина, элементы управления, защиты и контроля составляют рулевое устройство судна. Рулевое устройство предназначено для обеспечения управляемости судна: удержания его на заданном курсе, изменения курса и маневрирования. Для привода руля используют ЭД, которые в сочетании с передаточным механизмом и органами управления образуют рулевой электропривод.
Основным классификационным признаком является тип передачи крутящего момента от электропривода к баллеру руля. В практике применяются приводы двух основных типов: механические и гидравлические.
Механические приводы состоят из систем зубчатых передач, дающих постоянное или почти постоянное передаточное число от баллера руля к валу двигателя. Механические приводы подразделяются на:
— секторные, применяемые главным образом на судах транспортного флота;
— штуртросовые, имеющие электрическую рулевую машину, устанавливаемую в рубке, и тросовую передачу от неё к баллеру руля. Эти приводы используются преимущественно на речных судах.
Гидравлические приводы получили наибольшее распространение и являются основными на всех судах нашего флота. Эти приводы могут быть разделены на две группы:
— приводы с постоянно установленной гидравлической системой управления и изменением направления движения жидкости путем реверсирования двигателя;
— приводы с насосом переменной производительности, в которых при постоянном направлении вращения двигателя, соединенного с насосом, изменяется направление движения жидкости в системе путем регулирования в самом насосе. Эта группа приводов наиболее распространена.
Основные требования, предъявляемые к РЭП.
Рулевое устройство — одно из важнейших на судне. Выход этого устройства из строя ведет к потере управляемости, а иногда и к гибели судна.
Безаварийная работа рулевого устройства во многом зависит от надежности рулевого электропривода. Поэтому к РЭП предъявляют жесткие требования.
Рулевой электропривод должен обеспечивать:
— перекладку руля с борта на борт на полном переднем ходу судна за время не более 28 с;
— непрерывную перекладку руля с борта на борт на полном переднем ходу судна в течение 30 мин;
— длительную работу при ходе по курсу в режиме не менее 350 перекладок в час;
— изменение вращающего момента электродвигателя в пределах от 0 до 200% номинального;
— режим стоянки электродвигателя под током в течение 1 мин с нагретого состояния;
— безотказность, надежность и живучесть в течение всего периода эксплуатации судна;
— ограничение момента двигателя при перегрузке или заклинивании руля вплоть до его полной остановки и выхода его на автоматическую характеристику при прекращении перегрузки;
— автоматическое удержание руля на заданном курсе как при отрицательном моменте на баллере, так и при остановке привода без применения механических тормозов;
— удобство, простоту управления и постоянный контроль работы привода;
— возможность управления из разных мест: ходовой рубки, верхнего мостика, румпельного отделения;
— автоматическое ограничение предельных углов перекладки.
Рулевые электродвигатели работают либо в повторно-кратковременном, либо в длительном режиме, что зависит от вида передаточного механизма.
Так, механической передаче свойствен повторно-кратковременный режим с включением электродвигателя для каждой перекладки руля. Двигатели насосов переменной производительности электрогидравлических рулевых машин работают в длительном режиме с примерно постоянной скоростью, без реверса и без остановки в течение всего времени плавания судна.
Электродвигатели рулевых приводов с механической передачей должны иметь мягкие механические характеристики, так как это обеспечивает:
а) при заклинивании пера руля или заедании в механизме передачи переход двигателя в режим короткого замыкания с таким моментом на валу, который не вызовет поломки оборудования;
б) смягчение динамических усилий в электроприводе при ударах волн о перо руля;
в) замедление скорости двигателя с увеличением нагрузки, вызванным различными причинами, а стало быть, и ограничение потребляемой мощности.
Удовлетворению перечисленных требований способствует то, что в рулевых электроприводах с механической передачей применяются двигатели постоянного тока с независимым возбуждением, работающие в системе генератор — двигатель. Получение мягкой механической характеристики двигателя при этом обеспечивается противокомпаундной обмоткой генератора.
При гидравлической передаче можно использовать электродвигатели на постоянном и на переменном токе, но уже без ограничений в отношении степени жесткости механических характеристик, поскольку гидравлическое рулевое устройство само обеспечивает необходимую амортизацию ударных нагрузок и ограничение давления в системе в пределах допустимых значений. Наибольшее распространение для электропривода насоса переменной производительности получили при переменном токе — асинхронные двигатели с короткозамкнутым ротором типа АМ, при постоянном токе — двигатели типа П со смешанным возбуждением.
Режим работы рулевого электропривода зависит от хода судна. Во время выполнения судном маневренных операций рулевой перекладывает руль с борта на борт на максимальный угол. На этот режим работы и рассчитывают мощность двигателя, которая обусловливается значениями момента статического сопротивления заданного времени перекладки руля (скорости двигателя).
При ходе судна но курсу роль рулевого электропривода сводится к удержанию судна на заданном курсе, для чего производится частая перекладка руля (до 350 в 1 ч) па небольшой угол (обычно 4-6°). Такой режим работы, хотя и не вызывает больших моментов на валу, но может вызвать нагрев двигателя из-за многократных пусков и остановок.
Таким образом, двигатель рулевого электропривода рассчитывают с учетом обеспечения максимального момента и заданного времени перекладки руля с борта на борт при выполнении судном маневренных операций на полном переднем ходу. Выбранный двигатель проверяют на нагрев при работе в таком режиме в течение 30 мин. Иногда двигатель проверяют на нагрев при длительном удержании судна на заданном курсе, но обычно такая проверка, как и проверка на обеспечение заднего хода со средней скоростью, показывает значительный запас мощности двигателя, выбранного по результатам предыдущих расчетов. Поэтому от дополнительных проверок часто отказываются.
Источник статьи: http://studfile.net/preview/4598363/
Глава 2. Рулевые электроприводы.
1. Назначение и классификация рулевых приводов.
Под рулевым приводом принято понимать механизм для передачи движения к рулю. Рулевые приводы можно разделить по ряду признаков.
По назначению привод может быть основным, запасным и аварийным.
В зависимости от рода используемой энергии различают ручной и электрифицированный привод.
По принципу управления электрифицированные приводы разделяют на три типа :
— простого дистанционного действия, осуществляемого посредством кнопок, педалей или рычагов, положение которых не соответствует положению пера руля;
— следящего действия, осуществляемого с помощью рычагов и штурвала, положение которых строго соответствует положению пера руля;
— автоматического действия, выполняющие автоматическую стабилизацию судна на курсе, автоматический переход на новый курс и программное управление курсом по наперед заданному закону. Автоматические системы имеют резервное управление простого и следящего типов.
По типу передаточного механизма привод можно разделить на две группы:
— с механической передачей – РЭМ приводы;
— с гидравлической передачей – РЭГ приводы.
Рулевые приводы с механической передачей бывают штуртросовые, валиковые, винтовые и секторные.
Штуртросовые Валиковые Винтовые
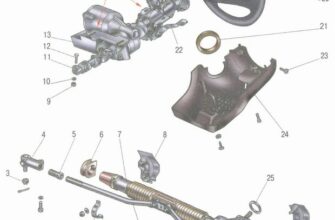
Рассмотрим принцип действия и устройство секторной рулевой машины.
| 1- перо руля; 2- баллер; 3- румпель; 4- пружина; 5- сектор с зубчатой насечкой; 6- цилиндрическая шестерня; 7- вал; 8- червячная пара; 9- муфта; 10- электродвигатель |
Баллер – вертикальный вал, закрепленный в подшипниках. Снизу к нему крепится перо руля, сверху свободно надевается сектор и жестко, шпонками, крепится румпель. Усилия от сектора к румпелю передается при помощи демпферных пружин, предназначенных для компенсации ударной нагрузки. Между ЭД и сектором стоит редуктор, представленный на чертеже червячной парой и цилиндрической шестерней, находящейся в зацеплении с сектором. Червячная пара – обязательный элемент редуктора, так как с его помощью легче и проще всего сделать передачу самотормозящейся, что требует Регистр. Передача становится самотормозящейся при КПД h
Секторные рулевые машины подразделяются на пять типов:
1 тип – машины одинарные «морские» с одним электродвигателем и червячным редуктором основного привода. Запасный привод автономный, действует на баллер руля независимо от основного, выполнен отдельно.
2 тип – машины одинарные «речные» с одним электродвигателем основного привода, одним ЭД запасного привода и дифференциальным редуктором Федорицкого, состоящего из двух червячных передач и конических шестеренок. Основной ЭД подсоединен к одному червяку, запасный, через дополнительный редуктор, ко второму червяку. Червячные колеса выполнены заодно с коническими шестернями, которые передают усилие на баллер через сателлиты. При работе одного двигателя, второй заторможен.
3 тип – машины одинарный «морские» с двумя электродвигателями и червячным редуктором основного привода. Запасный привод не предусматривается.
4 тип – тоже «речные».
Машины 1-4 типов предназначены для обслуживания одного и двух рулей.
5 тип – машины сдвоенные «речные», состоящие из двух одинарных машин 2 типа, у которых ЭД основного привода имеют два выходных конца вала: один подсоединен к хвостовику червяка редуктора, а другие концы, обращенные к диаметральной плоскости, соединены между собой при помощи электромагнитной муфты, допускающей раздельную работу одинарных рулевых машин.
Рулевые электрические приводы с гидравлической передачей (РЭГ — приводы) классифицируются по целому ряду признаков:
По типу гидропривода бывают: плунжерные, лопастные, с качающимися цилиндрами, реечно-плунжерные и т.д.
По типу насосов – с насосами переменной подачи и с насосами постоянной подачи;
По типу сервоприводов – постоянного, переменного тока, электромагнитный привод;
По типу дифференциалов кинематики сервопривода – рычажные, кулачковые, электрические и т.д.
Рассмотрим принципиальную схему, состав и работу плунжерного гидропривода, где:
| 1 – цилиндр 2 – плунжер 3 – баллер 4 – румпель 5 – поворотная муфта с цапфами 6 – ползуны 7 – направляющие 8 – предохранительный клапан 9 – клапанная коробка 10 – дроссельный клапан 11 – главная клапанная коробка 12 – насос переменной подачи 13 – насос постоянной подачи 14 – электродвигатель 15 – цистерна 17 – рычажный дифференциал 18 – пружина. |
Плунжерные гидроприводы могут быть в зависимости от момента на баллере с одной или двумя парами цилиндров. При четырех цилиндрах вторая пара располагается с другой стороны баллера, симметрично. Цилиндры могут располагаться параллельно и перпендикулярно диаметральной плоскости судна. Плунжерные гидравлические машины выполняются одно- и двухрулевые.
У рассматриваемой двухцилиндровой плунжерной рулевой машины цилиндры 1 установлены на фундаменте в направляющей 7. Выходы цилиндров 1 имеют уплотнения (кожаные или из маслостойкой резины). В месте утолщения плунжерной пары установлена поворотная муфта 5 свободно вращающаяся вокруг вертикальной оси на цапфах. В муфту входит цилиндрический хвостовик румпеля 4. При перемещении плунжеров происходит поворот баллера руля, сопровождающийся скольжением хвостовика румпеля в муфте, а также поворотом муфты. Боковые усилия, возникающие в плунжерной паре, через ползуны 6 воспринимаются направляющей 7.
Перекладка пера руля (поворот румпеля) происходит за счет избыточного давления в одном из цилиндров, которое создается насосом переменной подачи 12, перекачивающим масло из одного цилиндра в другой. Величина давления в цилиндрах определяется моментом сопротивления на баллере. При динамических нагрузках и возникновении давления выше допустимого срабатывает предохранительный клапан 8 и перепускает масло во всасывающую полость. Главная клапанная коробка 11 автоматически подключает работающий насос (их может быть два – основной и резервный, или основной и запасный, может быть три – два основных и один запасный). У четырехцилиндровых машин она позволяет отсечь неисправные два любых цилиндра и осуществлять работу на оставшихся цилиндрах. Насос постоянной подачи 13, дроссельный клапан 10 и клапанная коробка 9 создают подпор p = 0,3 ÷ 0,5 МПа для исключения подсасывания воздуха, при провале давления во всасывающем трубопроводе. В некоторых установках вместо них устанавливается подпорный бак.
В приводе используется главным образом управление следящего действия. Рассмотрим его работу на примере ручного управления с рычажным дифференциалом. Так при повороте рычага управления 16 влево нижний конец рычага 17 переместится в точку b, конец манипулятора насоса 12 переместится в точку d. Возникает эксцентриситет, и масло из правого цилиндра будет перекачиваться в левый, плунжер будет перемещаться вправо до тех пор, пока конец манипулятора не вернется в точку c и насос будет работать с нулевой подачей. Полный эксцентриситет возникает обычно при задании 5 0 ; больший угол перекладки пера руля воспринимается пружиной e — f.
Отечественной промышленностью выпускаются плунжерные гидравлические машины типов Р11 – Р20 с одним или двумя маслеными насосами регулируемой подачи с электроприводом. Указанные машины способны развивать момент на баллере 63 – 1000 кН•м.
2. Требования Правил Российского Речного Регистра к рулевому устройству.
1) Общие указания
– рулевым устройством должны быть оборудованы все самоходные суда;
– рулевой привод должен обеспечивать непрерывное управление судном в условиях эксплуатации, в том числе при отказе основного привода или отключении основного источника питания;
– перо руля и поворотная насадка не должны выступать за габариты судна;
– расположение руля и поворотной насадки должно исключать их повреждение от удара о грунт, при плавании судна с небольшим расчетным дифферентом на корму.
2). Комплектация рулевых устройств рулевыми приводами.
– рулевое устройство судна должно иметь два привода: основной и запасный. Запасный привод не требуется на судах с несколькими рулями или насадками, приводимыми в действие раздельно управляемыми машинами;
– основной и запасный рулевые приводы должны быть устроены так, чтобы повреждение одного из них не выводило из строя другой. Допускается при этом иметь общие детали силового привода на баллер (румпель, сектор, цилиндровый блок);
– система управления основным рулевым приводом должна быть независимой от системы управления запасным рулевым приводом. Допускается иметь общий штурвал или рукоятку управления;
– запасный рулевой привод должен обеспечивать перекладку руля или поворотной насадки на тот же максимальный угол, что и основной;
– посты управления основным и запасным рулевыми приводами должны быть оборудованы указателями положения руля (поворотной насадки).
3) Рулевые приводы:
– рулевые приводы должны обеспечивать непрерывную работу при постоянном крене до 15 0 и дифференте до 5 0 . Двигатели рулевых приводов должны допускать перегрузку по моменту, равному 1,5 расчетного крутящего момента в течение 1 минуты;
– мощность основного рулевого привода должна быть достаточной для перекладки руля на угол от 35 0 одного борта до 35 0 другого борта за время не более 30 секунд при максимальной скорости переднего хода судна и осадки по грузовую ватерлинию;
– мощность запасного механическогорулевого привода должна быть достаточной для перекладки руля на угол от 20 0 одного борта до 20 0 другого борта за время не более 60 секунд при скорости переднего хода 0,6 наибольшей и осадке его по грузовую ватерлинию;
– рулевой привод должен быть самотормозящейся конструкцией;
– если основной и запасный привод гидравлические, то каждый из этих приводов должен иметь насос с независимым двигателем, а трубопроводы приводов должны быть проложены как можно дальше друг от друга.
4) Электрический привод руля.
4.1 Электрический привод рулевого устройства должен обеспечивать:
– перекладку с борта на борт за время и угол, как указано выше;
– непрерывную перекладку руля с борта на борт в течение 30 минут для каждого агрегата при полностью погруженном руле и максимальной скорости переднего хода;
– возможность стоянки электродвигателя под током в течение 1 минуты с нагретого состояния (только для рулей с непосредственным электрическим приводом);
– начальный пусковой момент двигателя рулевого устройства с непосредственным электрическим приводом должен быть не менее 200 % номинального;
– при ходе судна по курсу не менее 350 включений в час при перекладке руля на 5 – 6 градусов, наибольшей эксплуатационной скорости переднего хода и непрерывной работе в течение 1 часа.
4.2. В схеме управления рулевого электрического привода должны быть предусмотрены конечные выключатели, ограничивающие перекладку руля или насадки на левый и правый борт. При срабатывании одного из них должна обеспечиваться возможность перекладки руля в обратном направлении.
4.3 Пусковые устройства должны обеспечивать повторный автоматический запуск ЭД при восстановлении напряжения после перерыва в подаче питания.
4.4. Для ЭД электрического или электрогидравлического рулевого устройства должно предусматриваться устройство защиты только от токов короткого замыкания.
Защита от минимального напряжения и перегрузки не допускаются. Вместо защиты от перегрузки должна быть установлена сигнализация.
4.5 Автоматические выключатели, защищающие электрические двигатели постоянного тока рулевых устройств от токов короткого замыкания, должны иметь уставки на мгновенное выключение при токе не менее 300 % и не более 400 % номинального тока защищаемого электрического двигателя, а для двигателей переменного тока – уставки на мгновенное выключение при токе более 125 % наибольшего пускового тока защищаемого двигателя.
4.6 У постов управления главными механизмами (при их наличии) и в рулевой рубке у поста управления рулем или в самом пульте управления должны быть устройства, сигнализирующие о наличии напряжения в цепи питания рулевого устройства, его перегрузке и отключении, а для гидравлических систем – по минимальному уровню масла в расходной цистерне.. Сигнал о перегрузке и отключении должен быть световым и звуковым.
5) Питание электрических приводов рулевых устройств.
– основной и запасный рулевые приводы должны получать питание по отдельным фидерам;
– каждый фидер должен быть рассчитан на питание всех электродвигателей, которые подключены к нему и работают одновременно;
– если аварийный источник электрической энергии имеет одинаковые напряжение и род тока с основным источником энергии, то один фидер идет от ГРЩ, второй от АРЩ. Фидеры прокладываются по разным бортам;
– аварийный источник электрической энергии должен обеспечить питание в течение не менее 6 часов пассажирских и грузопассажирских судов класса «М», не менее 3 часов судов класса «О», «Р», «Л»;
– время перехода с основного источника питания на аварийное должно составлять не более 15 секунд.
Рули и поворотные насадки.
3.1. Классификация рулей и поворотных насадок
Рули бывают активные и пассивные.
Активные рули обеспечивают управляемость судна без хода и на малых скоростях, когда обычные рули не эффективны. В их качестве могут применяться:
– перьевые рули с встроенными винтами и электродвигателями;
– поворотные насадки с раздельным управлением;
Пассивные рули обеспечивают управляемость судна на ходу. К ним относятся перьевые рули и поворотные насадки при совместном управлении.
По конструкции различают:
По количеству опор рули бывают подвесные, одноопорные и многоопорные.
По форме контура пера руля различают прямоугольные и произвольной формы, часто повторяющие очертания кормовой оконечности судна.
По расположению оси вращения рули подразделяются на:
Рассмотрим на примере плоских рулей прямоугольной формы:
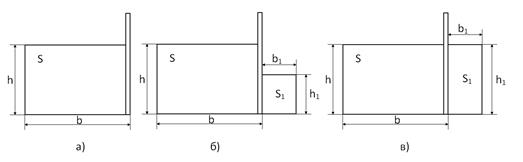
S – площадь пера руля;
S1 – площадь выступающей части пера руля;
h – высота пера руля;
h1 – высота выступающей (балансирной) части пера руля;
b – ширина пера руля – расстояние от набегающей кромки до кормовой оконечности пера руля;
b1 – ширина балансирной части руля – расстояние от набегающей кромки до оси вращения.
Простой руль. Для упрощения расчетов считают, что набегающая кромка пера руля совпадает с осью вращения.
Полубалансирный руль, когда высота выступающей (балансирной) части не равна высоте пера руля:
Балансирный руль, когда высота балансирной части равна высоте руля.
Балансирный и полубалансирные рули характеризуются коэффициентом компенсации, под которым понимают отношение площади выступающей части к полной площади пера руля:

Для балансирных рулей:

Число рулей на судне может быть 1, 2, 3, 4 и т.д. Они устанавливаются как за винтами, так и между ними. Наиболее эффективны рули при установке за винтами.
Поворотные направляющие насадки.
По конструкции различают:
– насадки без стабилизатора;
– с неподвижным стабилизатором;
– с управляемым стабилизатором.
По числу опор бывают насадки подвесные и насадки с одной опорой на пятке.
По длине окружности охвата винта насадки бывают полные и неполные.
Полная направляющая насадка представляет собой кольцевое крыло, имеющее в продольном сечении форму аэродинамического профиля и охватывающее с минимальным зазором гребной винт.
Из опыта проектирования и эксплуатации установлены оптимальные размеры:
Дн ≤ 1,02 Дв; lн = (0,7 ÷ 0,9) Дв
Поворотные насадки характеризуются коэффициентом раствора αн и коэффициентом расширения βн.

Особенность действия насадки, по сравнению с простым рулем, возникновение гидродинамических сил, стремящихся повернуть насадку на больший угол по отношению к набегающему потоку.
Для компенсации вращающего момента этих сил устанавливается стабилизатор, высота стабилизатора hСТ = ДВЫХ , длина lСТ = 0,6 ДН (при увеличении длины стабилизатора возрастает момент заднего хода МЗ.Х. на баллере, при уменьшении – ухудшается устойчивость судна на курсе).
Применение поворотных насадок (ПН) улучшает условия работы двигателя:
– повышается КПД, так как увеличивается площадь сечения струи винта при прочих равных условиях(частота вращения, упор). Так у буксиров поворотные насадки увеличивают тягу на гаке на 50 % на швартовах, на 20 – 30 % при ходе с составом и может увеличиться скорость порожнем;
– улучшаются условия работы винта при волнении из-за демпфирующего свойства ПН;
– уменьшается качка судна и уменьшаются перепады нагрузки на главных двигателях.
На быстроходных судах ПН не применяют из-за повышенного лобового сопротивления.
3.2. Действие потока воды на перо руля. Поворачивающий судно момент.
При прямолинейном движении судна и отклонении руля от диаметральной плоскости (ДП) на угол α (будем считать равным углу атаки, то есть углу, под которым поток набегает на плоскость пера руля) на пере руля под действием набегающего потока воды возникают силы давления. Поле сил давление может быть представлено равнодействующей силой Р, нормальная составляющая которой Рn направлена перпендикулярно продольной оси пера руля.
Разложим Рn на составляющие:
Р2 = Pn • sinα – продольная составляющая, лежащая практически в диаметральной плоскости. Может быть перенесена в центр тяжести судна. Отсюда видно, что она оказывает дополнительное сопротивление движению судна.
Р1 = Pn • cosα – поперечная составляющая .
Поместим в центр тяжести судна взаимно уравновешивающиеся силы Р′ и Р″, равные и параллельные силе Р1. Силы Р1 и Р′ составляют пару сил, плечо которой можно считать приблизительно равным половине длины судна L. Они образуют момент, поворачивающий судно в сторону перекладки руля.
Сила Р″ называется силой дрейфа. Она сносит судно боком во внешнюю сторону описываемой им дуги и создает, из-за наличия метацентрической высоты, крен судна.
Установлено, что нормальная составляющая Рn пропорциональна площади пера руля, квадрату скорости потока воды из под винтов (скорости движения судна) и sinα.

где: S – площадь пера руля, м 2 ;
V – скорость судна, м/с;
k – коэффициент пропорциональности, зависящий от угла перекладки, от обводов корпуса судна, глубины акватории.
Для различных типов рулей значения коэффициента k устанавливаются экспериментально и задаются в виде графиков и таблиц.
Для прямоугольных плоских рулей проф. Полонский предложил аналитическое выражение для коэффициента k:
 [кН]
[кН]
 [кН•м]
[кН•м]
Это выражение имеет максимум при 0 0 . Если взять производную по углу α и приравнять к нулю, то получим:



При решении найдем, что максимальный момент будет при α = 35,9 0 .
Следовательно, для эффективного поворота судна прикладывать руль на больший угол нет необходимости.
Отсюда и требования Регистра – перекладка руля от 35 0 одного борта до 35 0 другого за время менее 30 с.
Источник статьи: http://infopedia.su/15x235a.html