БЛОГ ЭЛЕКТРОМЕХАНИКА
Студенческий блог для электромеханика. Обучение и практика, новости науки и техники. В помощь студентам и специалистам
02.07.2011
Электроприводы рулевых устройств. Электрогидравлические рулевые приводы
Классификация рулевых электроприводов
Основным классификационным признаком рулевых электроприводов является тип передачи крутящего момента от электропривода к баллеру руля. В практике применяются приводы двух основных типов: механические и гидравлические.
Гидравлическая рулевая машина
Наиболее перспективным и широко применяемым типом передаточного механизма является гидравлическая рулевая машина, которой присущи следующие достоинства: возможность создания привода с большими усилиями и крутящими моментами, простота осуществления плавного и точного регулирования привода, обеспечение защиты от перегрузок, сравнительно малые масса и габариты, длительный срок службы и безотказность в условиях повышенной влажности и заливаемости, высокая вибро- и ударостойкость. Но наряду с этим гидравлическим рулевым машинам свойственны некоторые недостатки: небольшой КПД, трудность монтажа трубопроводов большой протяженности, высокие требования к качеству монтажа для исключения возможных утечек рабочей жидкости, а также высокая стоимость основного гидрооборудования. Машины и пускорегулирующая аппаратура легче и занимают меньший объем, чем электрическое оборудование, однако системы передачи гидроэнергии — трубопроводы, арматура и т. д. — тяжелее и больше по объему по сравнению с кабелями электроэнергии.
Выпускаемые отечественной промышленностью плунжерные рулевые электрогидравлические машины типов Р01—Р10 с насосом постоянной подачи или типов P11—Р22 с насосом регулируемой подачи в зависимости от момента на баллере и скорости перекладки руля изготовляются двух- или четырехцилиндровыми. Связь плунжера с баллером в таких машинах осуществляется с номощыо шарнира. Наличие шарнира обеспечивает возможность перемещения плунжера относительно румпеля в вертикальной и горизонтальной плоскостях, что особенно важно для обеспечения надежности рулевого устройства.
Следует отметить, что гидравлические машины могут выполняться с параллельным и перпендикулярным расположением цилиндров относительно оси судна. При параллельном расположении число цилиндров доходит до четырех. Такого типа установки применяются на крупных судах и обычно имеют два самостоятельных (резервный и основной) гидравлических насоса, работающих каждый на свою пару цилиндров.
Общие свойства и системы
Наиболее ответственным из судовых электроприводов является рулевой привод. От его качества зависят маневренность судна и безопасность плавания. Поэтому Правилами Речного Регистра РСФСР к рулевым электроприводам предъявляются особые требования, которые необходимо выполнять при проектировании и постройке.
К числу этих требовании относятся: перекладка руля с борта на борт на угол ± 35° за время не более 30 с; число включении не менее 350 в час; вращающий момент на валу от 0 до 200 % номинального; стоянка под током в нагретом состоянии в течение 1 мин (только для электромеханических рулевых приводов); непрерывная перекладка руля с борта на борт в течение 30 мин при наибольшей скорости и полной осадке судна.
Для электрических приводов рулевых устройств должны быть выполнены также следующие требования: пусковые устройства должны обеспечивать повторный автоматический пуск электродвигателей при восстановлении напряжения; световая сигнализация должна указывать на наличие напряжения в цепи питания рулевого привода, его перегрузки и отключения; конечные выключатели должны ограничивать перекладку руля на левый и правый борт и не препятствовать перекладке в обратном направлении; питание электроэнергии должно быть предусмотрено от двух источников с автоматическим переключением: защита электродвигателей — только от токов короткого замыкания.
Для резервных рулевых приводов требования несколько иные, а именно: время перекладки руля с борта на борт на 20° не более 60 с при полной осадке судна и скорости переднего хода, равной 0,6 наибольшей: продолжительность работы источника питания резервного электропривода должна быть не менее 15 мин.
Рулевые приводы должны обладать большой надежностью, простотой обслуживания, малыми габаритными размерами и массой, возможностью быстрого перехода с основного на резервное управление, не превышающего 10 с.
Электрогидравлические приводы (ЭГ) характеризуются отсутствием жесткой передачи от вала двигателя к баллеру руля. Передаточное число ЭГ систем является переменным и скорость перекладки пера руля изменяется в зависимости от положения управляющего органа насосов переменной производительности или положения золотника в системах с насосом неизменной производительности.
Электрогидравлические рулевые приводы получили широкое распространение на современных судах не только в силу определенных преимуществ этой системы, но и вследствие того, что отечественной судостроительной промышленностью налажен серийный выпуск унифицированных рулевых электрогидравлических машин типов Р01 – Р20 для широкого диапазона требуемых вращающих моментов на баллере руля, для судов как морского, так и речного флота.
Основной задачей судовождения является точное и безопасное управление движением судна в соответствии с заданным маршрутом при минимальных эксплуатационных затратах.
Такое управление обеспечивают автоматизированные электроприводы рулевого устройства и системы управления курсом судна.
В состав рулевого устройства обычно входит руль, передаточный механизм, исполнительный двигатель и система управления. При перекладке руля от диаметральной плоскости судна на некоторый угол создается вращающий момент, вызывающий поворот судна и, следовательно, обеспечивающий управление движением судна.
Важнейшими свойствами движущегося судна являются: управляемость, устойчивость, поворотливость и надежность. Управляемостью называют способность судна двигаться прямолинейно или описывать траектории любой наперед заданной кривизны. Управляемость объединяет два противоположных по своему характеру свойства судна: устойчивость движения на курсе и поворотливость. Устойчивостью на курсе называют способность судна удерживать заданное прямолинейное направление движения. Поворотливость — способность судна изменять нужным образом направление движения при изменении положения пера руля. Указанные свойства реализуются с помощью электропривода рулевого устройства в соответствии с режимами движения судна: маневрирования и удержания на заданном курсе.
В режиме маневрирования судна для обеспечения поворотливости необходимы перекладки руля на большие углы и удержание его в переложенном положении. При этом на руль действуют нагрузки, для преодоления которых момент на баллере должен достигать значительной величины, особенно при максимальной скорости судна. Угол перекладки руля может достигать 35°, а время перекладки руля с борта на борт задается и должно составлять не более 28 с. Режим маневрирования определяет работу привода с точки зрения времени перекладки и максимальных нагрузочных моментов, в соответствии с чем устанавливаются мощность и частота вращения исполнительного двигателя. При этом необходимо также учитывать возможность возникновения опорного момента при циркуляциях малого диаметра.
В режиме удержания судна на заданном курсе для обеспечения его устойчивости, как показали результаты испытаний, необходимы частые перекладки руля. При углах перекладки 4—6° число включений привода составляет около 400 включений в час при ручном управлении и до 1500 включений в час при автоматическом управлении в зависимости от ряда факторов, например состояния погоды, равномерности частоты вращения винтов и пр. Рассматриваемый режим определяет работу привода главным образом с точки зрения переходных процессов и условий нагрева.
Рулевое устройство должно иметь два привода: основной и запасной. При действии основного рулевого привода рулевое устройство должно обеспечивать маневрирование судна с перекладкой полностью погруженного руля с борта на борт при максимальной скорости переднего хода. Каждый из приводов должен действовать на баллер руля независимо от другого, однако некоторые элементы приводов могут быть общими.
Мощность основного рулевого привода должна быть достаточной для перекладок руля от 35° с одного борта до 30° на другой борт за время не более 30 с при максимальной скорости переднего хода судна и осадке его по летнюю грузовую ватерлинию. Рулевые приводы должны длительно работать в наиболее тяжелых условиях эксплуатации. Каждый рулевой привод должен иметь устройство, прекращающее его действие прежде, чем руль дойдет до упора в ограничителе поворота руля.
Электроприводы рулевого устройства должны получать питание от шин главного распределительного щита (ГРЩ) по двум фидерам, проложенным непосредственно от ГРЩ отдельными трассами, разнесенными на всем протяжении как можно дальше друг от друга. Рекомендуется, чтобы один из фидеров получал питание через аварийный РЩ. Каждый фидер должен быть рассчитан на питание всех электродвигателей, которые присоединены к нему параллельно и работают одновременно. Пусковые устройства должны обеспечивать повторный автоматический запуск электродвигателей при восстановлении напряжения после перерыва в подаче питания. Питание систем автоматизации рулевого привода должно осуществляться также от двух источников: основного и аварийного.
Системы дистанционного управления рулем с главного и вспомогательного постов должны быть устроены так, чтобы выход из строя любой из этих систем не исключал возможности управления судном с другого поста. Около каждого поста управления должен размещаться указатель положения пера руля. При переходе на ручное управление рулевым устройством автоматическое управление должно отключаться. Электропривод рулевых устройств должен непрерывно работать в течение одного часа при наибольшей эксплуатационной скорости переднего хода и при перекладке руля на угол, обеспечивающий 350 перекладок в час.
Одним из наиболее ответственных параметров является срок службы. Так, если для наливных, пассажирских, сухогрузных, промысловых судов, буксиров общий срок службы составляет 30 лет, а число ходовых часов в год 3000—6000, то число рабочих часов за год для рулевых машин дифференцируется в зависимости от типа судна и составляет: для наливных судов 5000—6000, сухогрузных и пассажирских 3000—4000, промысловых 3000—5000, буксиров 3000—5000. Для судов на подводных крыльях, общий срок службы которых 10—12 лет, число ходовых часов совпадает с числом рабочих часов для рулевых машин и составляет 1500—2000.
Таковы общие требования, предъявляемые к рулевому устройству и его электроприводу. Наряду с этим электропривод рулевого устройства должен обеспечивать: автоматическое удержание руля при отрицательных моментах со стороны пера руля, когда двигатель отключен от сети; ограничение момента двигателя вплоть до его остановки под напряжением; автоматический переход двигателя на естественную характеристику после прекращения перегрузки; изменение направления вращения пера руля на тот или иной борт; пусковой момент, достаточный для разгона привода; остановку привода без применения механических тормозов; большое число включений.
Уровни автоматизации электропривода рулевого устройства
Эффективное решение задач судовождения возможно лишь при условии комплексной автоматизации процессов судовождения, которая позволяет передать трудоемкие операции по управлению движением и курсом судна от человека управляющему комплексу, что исключает субъективные ошибки оператора, повышает безопасность плавания и обеспечивает оптимальное управление движением судна. Объем автоматизации должен определяться для каждого типа судна в зависимости от его назначения и условий плавания. Для эффективного управления движением судна по заданной программе необходима точная и быстрая (оперативная) оценка местоположения судна, а формирование сигнала, управляющего электроприводом рулевого устройства, должно происходить в соответствии с динамическими свойствами судна как объекта управления.
Частным случаем движения судна по заданной программе (заданному маршруту) является стабилизация судна на курсе. Эта задача решается существующими системами автоматического управления электроприводом («Аист», «Самшит», АБР и др.). Для расхождения с опасными объектами, встреча с которыми не может быть предусмотрена программой, необходимо своевременно обнаружить и точно определить местоположение опасного объекта, оценить вероятность столкновения, выбрать безопасный маневр и обеспечить расхождение. В подобных случаях, а также при маневрировании изменение сигналов, управляющих электроприводом рулевого устройства, имеет сложный характер и может быть обеспечено управляющим комплексом.
В соответствии с объемом автоматизации в управляющем комплексе можно выделить несколько уровней автоматизации электропривода рулевого устройства. Каждый уровень определяется совокупностью систем и устройств, которые могут функционировать самостоятельно независимо от систем вышестоящих уровней.
Нулевым уровнем автоматизации является ручное управление рулевым устройством РУ, используемое при аварии. Первый уровень автоматизации — дистанционное управление электроприводом руля ЭП, которое может быть обеспечено как системой без обратной связи, так и следящей системой.
Второй уровень автоматизации — автоматическое управление электроприводом, осуществляемое локальной системой управления ЛАСУ — авторулевым, обеспечивающим автоматическое удержание судна на заданном курсе и выполнение заданных маневров. Третий уровень автоматизации — программное управление движением судна по заданной траектории, которое обеспечивается управляющим комплексом УК.
Источник статьи: http://www.electroengineer.ru/2011/07/blog-post_02.html
Глава 2. Рулевые электроприводы.
1. Назначение и классификация рулевых приводов.
Под рулевым приводом принято понимать механизм для передачи движения к рулю. Рулевые приводы можно разделить по ряду признаков.
По назначению привод может быть основным, запасным и аварийным.
В зависимости от рода используемой энергии различают ручной и электрифицированный привод.
По принципу управления электрифицированные приводы разделяют на три типа :
— простого дистанционного действия, осуществляемого посредством кнопок, педалей или рычагов, положение которых не соответствует положению пера руля;
— следящего действия, осуществляемого с помощью рычагов и штурвала, положение которых строго соответствует положению пера руля;
— автоматического действия, выполняющие автоматическую стабилизацию судна на курсе, автоматический переход на новый курс и программное управление курсом по наперед заданному закону. Автоматические системы имеют резервное управление простого и следящего типов.
По типу передаточного механизма привод можно разделить на две группы:
— с механической передачей – РЭМ приводы;
— с гидравлической передачей – РЭГ приводы.
Рулевые приводы с механической передачей бывают штуртросовые, валиковые, винтовые и секторные.
Штуртросовые Валиковые Винтовые
Рассмотрим принцип действия и устройство секторной рулевой машины.
| 1- перо руля; 2- баллер; 3- румпель; 4- пружина; 5- сектор с зубчатой насечкой; 6- цилиндрическая шестерня; 7- вал; 8- червячная пара; 9- муфта; 10- электродвигатель |
Баллер – вертикальный вал, закрепленный в подшипниках. Снизу к нему крепится перо руля, сверху свободно надевается сектор и жестко, шпонками, крепится румпель. Усилия от сектора к румпелю передается при помощи демпферных пружин, предназначенных для компенсации ударной нагрузки. Между ЭД и сектором стоит редуктор, представленный на чертеже червячной парой и цилиндрической шестерней, находящейся в зацеплении с сектором. Червячная пара – обязательный элемент редуктора, так как с его помощью легче и проще всего сделать передачу самотормозящейся, что требует Регистр. Передача становится самотормозящейся при КПД h
Секторные рулевые машины подразделяются на пять типов:
1 тип – машины одинарные «морские» с одним электродвигателем и червячным редуктором основного привода. Запасный привод автономный, действует на баллер руля независимо от основного, выполнен отдельно.
2 тип – машины одинарные «речные» с одним электродвигателем основного привода, одним ЭД запасного привода и дифференциальным редуктором Федорицкого, состоящего из двух червячных передач и конических шестеренок. Основной ЭД подсоединен к одному червяку, запасный, через дополнительный редуктор, ко второму червяку. Червячные колеса выполнены заодно с коническими шестернями, которые передают усилие на баллер через сателлиты. При работе одного двигателя, второй заторможен.
3 тип – машины одинарный «морские» с двумя электродвигателями и червячным редуктором основного привода. Запасный привод не предусматривается.
4 тип – тоже «речные».
Машины 1-4 типов предназначены для обслуживания одного и двух рулей.
5 тип – машины сдвоенные «речные», состоящие из двух одинарных машин 2 типа, у которых ЭД основного привода имеют два выходных конца вала: один подсоединен к хвостовику червяка редуктора, а другие концы, обращенные к диаметральной плоскости, соединены между собой при помощи электромагнитной муфты, допускающей раздельную работу одинарных рулевых машин.
Рулевые электрические приводы с гидравлической передачей (РЭГ — приводы) классифицируются по целому ряду признаков:
По типу гидропривода бывают: плунжерные, лопастные, с качающимися цилиндрами, реечно-плунжерные и т.д.
По типу насосов – с насосами переменной подачи и с насосами постоянной подачи;
По типу сервоприводов – постоянного, переменного тока, электромагнитный привод;
По типу дифференциалов кинематики сервопривода – рычажные, кулачковые, электрические и т.д.
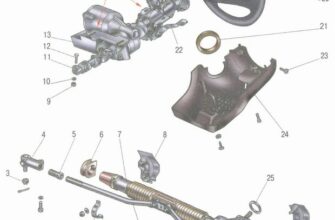
Рассмотрим принципиальную схему, состав и работу плунжерного гидропривода, где:
| 1 – цилиндр 2 – плунжер 3 – баллер 4 – румпель 5 – поворотная муфта с цапфами 6 – ползуны 7 – направляющие 8 – предохранительный клапан 9 – клапанная коробка 10 – дроссельный клапан 11 – главная клапанная коробка 12 – насос переменной подачи 13 – насос постоянной подачи 14 – электродвигатель 15 – цистерна 17 – рычажный дифференциал 18 – пружина. |
Плунжерные гидроприводы могут быть в зависимости от момента на баллере с одной или двумя парами цилиндров. При четырех цилиндрах вторая пара располагается с другой стороны баллера, симметрично. Цилиндры могут располагаться параллельно и перпендикулярно диаметральной плоскости судна. Плунжерные гидравлические машины выполняются одно- и двухрулевые.
У рассматриваемой двухцилиндровой плунжерной рулевой машины цилиндры 1 установлены на фундаменте в направляющей 7. Выходы цилиндров 1 имеют уплотнения (кожаные или из маслостойкой резины). В месте утолщения плунжерной пары установлена поворотная муфта 5 свободно вращающаяся вокруг вертикальной оси на цапфах. В муфту входит цилиндрический хвостовик румпеля 4. При перемещении плунжеров происходит поворот баллера руля, сопровождающийся скольжением хвостовика румпеля в муфте, а также поворотом муфты. Боковые усилия, возникающие в плунжерной паре, через ползуны 6 воспринимаются направляющей 7.
Перекладка пера руля (поворот румпеля) происходит за счет избыточного давления в одном из цилиндров, которое создается насосом переменной подачи 12, перекачивающим масло из одного цилиндра в другой. Величина давления в цилиндрах определяется моментом сопротивления на баллере. При динамических нагрузках и возникновении давления выше допустимого срабатывает предохранительный клапан 8 и перепускает масло во всасывающую полость. Главная клапанная коробка 11 автоматически подключает работающий насос (их может быть два – основной и резервный, или основной и запасный, может быть три – два основных и один запасный). У четырехцилиндровых машин она позволяет отсечь неисправные два любых цилиндра и осуществлять работу на оставшихся цилиндрах. Насос постоянной подачи 13, дроссельный клапан 10 и клапанная коробка 9 создают подпор p = 0,3 ÷ 0,5 МПа для исключения подсасывания воздуха, при провале давления во всасывающем трубопроводе. В некоторых установках вместо них устанавливается подпорный бак.
В приводе используется главным образом управление следящего действия. Рассмотрим его работу на примере ручного управления с рычажным дифференциалом. Так при повороте рычага управления 16 влево нижний конец рычага 17 переместится в точку b, конец манипулятора насоса 12 переместится в точку d. Возникает эксцентриситет, и масло из правого цилиндра будет перекачиваться в левый, плунжер будет перемещаться вправо до тех пор, пока конец манипулятора не вернется в точку c и насос будет работать с нулевой подачей. Полный эксцентриситет возникает обычно при задании 5 0 ; больший угол перекладки пера руля воспринимается пружиной e — f.
Отечественной промышленностью выпускаются плунжерные гидравлические машины типов Р11 – Р20 с одним или двумя маслеными насосами регулируемой подачи с электроприводом. Указанные машины способны развивать момент на баллере 63 – 1000 кН•м.
2. Требования Правил Российского Речного Регистра к рулевому устройству.
1) Общие указания
– рулевым устройством должны быть оборудованы все самоходные суда;
– рулевой привод должен обеспечивать непрерывное управление судном в условиях эксплуатации, в том числе при отказе основного привода или отключении основного источника питания;
– перо руля и поворотная насадка не должны выступать за габариты судна;
– расположение руля и поворотной насадки должно исключать их повреждение от удара о грунт, при плавании судна с небольшим расчетным дифферентом на корму.
2). Комплектация рулевых устройств рулевыми приводами.
– рулевое устройство судна должно иметь два привода: основной и запасный. Запасный привод не требуется на судах с несколькими рулями или насадками, приводимыми в действие раздельно управляемыми машинами;
– основной и запасный рулевые приводы должны быть устроены так, чтобы повреждение одного из них не выводило из строя другой. Допускается при этом иметь общие детали силового привода на баллер (румпель, сектор, цилиндровый блок);
– система управления основным рулевым приводом должна быть независимой от системы управления запасным рулевым приводом. Допускается иметь общий штурвал или рукоятку управления;
– запасный рулевой привод должен обеспечивать перекладку руля или поворотной насадки на тот же максимальный угол, что и основной;
– посты управления основным и запасным рулевыми приводами должны быть оборудованы указателями положения руля (поворотной насадки).
3) Рулевые приводы:
– рулевые приводы должны обеспечивать непрерывную работу при постоянном крене до 15 0 и дифференте до 5 0 . Двигатели рулевых приводов должны допускать перегрузку по моменту, равному 1,5 расчетного крутящего момента в течение 1 минуты;
– мощность основного рулевого привода должна быть достаточной для перекладки руля на угол от 35 0 одного борта до 35 0 другого борта за время не более 30 секунд при максимальной скорости переднего хода судна и осадки по грузовую ватерлинию;
– мощность запасного механическогорулевого привода должна быть достаточной для перекладки руля на угол от 20 0 одного борта до 20 0 другого борта за время не более 60 секунд при скорости переднего хода 0,6 наибольшей и осадке его по грузовую ватерлинию;
– рулевой привод должен быть самотормозящейся конструкцией;
– если основной и запасный привод гидравлические, то каждый из этих приводов должен иметь насос с независимым двигателем, а трубопроводы приводов должны быть проложены как можно дальше друг от друга.
4) Электрический привод руля.
4.1 Электрический привод рулевого устройства должен обеспечивать:
– перекладку с борта на борт за время и угол, как указано выше;
– непрерывную перекладку руля с борта на борт в течение 30 минут для каждого агрегата при полностью погруженном руле и максимальной скорости переднего хода;
– возможность стоянки электродвигателя под током в течение 1 минуты с нагретого состояния (только для рулей с непосредственным электрическим приводом);
– начальный пусковой момент двигателя рулевого устройства с непосредственным электрическим приводом должен быть не менее 200 % номинального;
– при ходе судна по курсу не менее 350 включений в час при перекладке руля на 5 – 6 градусов, наибольшей эксплуатационной скорости переднего хода и непрерывной работе в течение 1 часа.
4.2. В схеме управления рулевого электрического привода должны быть предусмотрены конечные выключатели, ограничивающие перекладку руля или насадки на левый и правый борт. При срабатывании одного из них должна обеспечиваться возможность перекладки руля в обратном направлении.
4.3 Пусковые устройства должны обеспечивать повторный автоматический запуск ЭД при восстановлении напряжения после перерыва в подаче питания.
4.4. Для ЭД электрического или электрогидравлического рулевого устройства должно предусматриваться устройство защиты только от токов короткого замыкания.
Защита от минимального напряжения и перегрузки не допускаются. Вместо защиты от перегрузки должна быть установлена сигнализация.
4.5 Автоматические выключатели, защищающие электрические двигатели постоянного тока рулевых устройств от токов короткого замыкания, должны иметь уставки на мгновенное выключение при токе не менее 300 % и не более 400 % номинального тока защищаемого электрического двигателя, а для двигателей переменного тока – уставки на мгновенное выключение при токе более 125 % наибольшего пускового тока защищаемого двигателя.
4.6 У постов управления главными механизмами (при их наличии) и в рулевой рубке у поста управления рулем или в самом пульте управления должны быть устройства, сигнализирующие о наличии напряжения в цепи питания рулевого устройства, его перегрузке и отключении, а для гидравлических систем – по минимальному уровню масла в расходной цистерне.. Сигнал о перегрузке и отключении должен быть световым и звуковым.
5) Питание электрических приводов рулевых устройств.
– основной и запасный рулевые приводы должны получать питание по отдельным фидерам;
– каждый фидер должен быть рассчитан на питание всех электродвигателей, которые подключены к нему и работают одновременно;
– если аварийный источник электрической энергии имеет одинаковые напряжение и род тока с основным источником энергии, то один фидер идет от ГРЩ, второй от АРЩ. Фидеры прокладываются по разным бортам;
– аварийный источник электрической энергии должен обеспечить питание в течение не менее 6 часов пассажирских и грузопассажирских судов класса «М», не менее 3 часов судов класса «О», «Р», «Л»;
– время перехода с основного источника питания на аварийное должно составлять не более 15 секунд.
Рули и поворотные насадки.
3.1. Классификация рулей и поворотных насадок
Рули бывают активные и пассивные.
Активные рули обеспечивают управляемость судна без хода и на малых скоростях, когда обычные рули не эффективны. В их качестве могут применяться:
– перьевые рули с встроенными винтами и электродвигателями;
– поворотные насадки с раздельным управлением;
Пассивные рули обеспечивают управляемость судна на ходу. К ним относятся перьевые рули и поворотные насадки при совместном управлении.
По конструкции различают:
По количеству опор рули бывают подвесные, одноопорные и многоопорные.
По форме контура пера руля различают прямоугольные и произвольной формы, часто повторяющие очертания кормовой оконечности судна.
По расположению оси вращения рули подразделяются на:
Рассмотрим на примере плоских рулей прямоугольной формы:
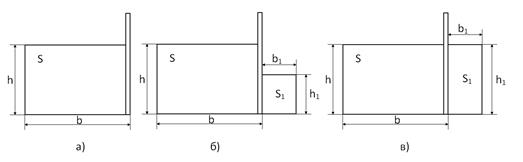
S – площадь пера руля;
S1 – площадь выступающей части пера руля;
h – высота пера руля;
h1 – высота выступающей (балансирной) части пера руля;
b – ширина пера руля – расстояние от набегающей кромки до кормовой оконечности пера руля;
b1 – ширина балансирной части руля – расстояние от набегающей кромки до оси вращения.
Простой руль. Для упрощения расчетов считают, что набегающая кромка пера руля совпадает с осью вращения.
Полубалансирный руль, когда высота выступающей (балансирной) части не равна высоте пера руля:
Балансирный руль, когда высота балансирной части равна высоте руля.
Балансирный и полубалансирные рули характеризуются коэффициентом компенсации, под которым понимают отношение площади выступающей части к полной площади пера руля:

Для балансирных рулей:

Число рулей на судне может быть 1, 2, 3, 4 и т.д. Они устанавливаются как за винтами, так и между ними. Наиболее эффективны рули при установке за винтами.
Поворотные направляющие насадки.
По конструкции различают:
– насадки без стабилизатора;
– с неподвижным стабилизатором;
– с управляемым стабилизатором.
По числу опор бывают насадки подвесные и насадки с одной опорой на пятке.
По длине окружности охвата винта насадки бывают полные и неполные.
Полная направляющая насадка представляет собой кольцевое крыло, имеющее в продольном сечении форму аэродинамического профиля и охватывающее с минимальным зазором гребной винт.
Из опыта проектирования и эксплуатации установлены оптимальные размеры:
Дн ≤ 1,02 Дв; lн = (0,7 ÷ 0,9) Дв
Поворотные насадки характеризуются коэффициентом раствора αн и коэффициентом расширения βн.

Особенность действия насадки, по сравнению с простым рулем, возникновение гидродинамических сил, стремящихся повернуть насадку на больший угол по отношению к набегающему потоку.
Для компенсации вращающего момента этих сил устанавливается стабилизатор, высота стабилизатора hСТ = ДВЫХ , длина lСТ = 0,6 ДН (при увеличении длины стабилизатора возрастает момент заднего хода МЗ.Х. на баллере, при уменьшении – ухудшается устойчивость судна на курсе).
Применение поворотных насадок (ПН) улучшает условия работы двигателя:
– повышается КПД, так как увеличивается площадь сечения струи винта при прочих равных условиях(частота вращения, упор). Так у буксиров поворотные насадки увеличивают тягу на гаке на 50 % на швартовах, на 20 – 30 % при ходе с составом и может увеличиться скорость порожнем;
– улучшаются условия работы винта при волнении из-за демпфирующего свойства ПН;
– уменьшается качка судна и уменьшаются перепады нагрузки на главных двигателях.
На быстроходных судах ПН не применяют из-за повышенного лобового сопротивления.
3.2. Действие потока воды на перо руля. Поворачивающий судно момент.
При прямолинейном движении судна и отклонении руля от диаметральной плоскости (ДП) на угол α (будем считать равным углу атаки, то есть углу, под которым поток набегает на плоскость пера руля) на пере руля под действием набегающего потока воды возникают силы давления. Поле сил давление может быть представлено равнодействующей силой Р, нормальная составляющая которой Рn направлена перпендикулярно продольной оси пера руля.
Разложим Рn на составляющие:
Р2 = Pn • sinα – продольная составляющая, лежащая практически в диаметральной плоскости. Может быть перенесена в центр тяжести судна. Отсюда видно, что она оказывает дополнительное сопротивление движению судна.
Р1 = Pn • cosα – поперечная составляющая .
Поместим в центр тяжести судна взаимно уравновешивающиеся силы Р′ и Р″, равные и параллельные силе Р1. Силы Р1 и Р′ составляют пару сил, плечо которой можно считать приблизительно равным половине длины судна L. Они образуют момент, поворачивающий судно в сторону перекладки руля.
Сила Р″ называется силой дрейфа. Она сносит судно боком во внешнюю сторону описываемой им дуги и создает, из-за наличия метацентрической высоты, крен судна.
Установлено, что нормальная составляющая Рn пропорциональна площади пера руля, квадрату скорости потока воды из под винтов (скорости движения судна) и sinα.

где: S – площадь пера руля, м 2 ;
V – скорость судна, м/с;
k – коэффициент пропорциональности, зависящий от угла перекладки, от обводов корпуса судна, глубины акватории.
Для различных типов рулей значения коэффициента k устанавливаются экспериментально и задаются в виде графиков и таблиц.
Для прямоугольных плоских рулей проф. Полонский предложил аналитическое выражение для коэффициента k:
 [кН]
[кН]
 [кН•м]
[кН•м]
Это выражение имеет максимум при 0 0 . Если взять производную по углу α и приравнять к нулю, то получим:



При решении найдем, что максимальный момент будет при α = 35,9 0 .
Следовательно, для эффективного поворота судна прикладывать руль на больший угол нет необходимости.
Отсюда и требования Регистра – перекладка руля от 35 0 одного борта до 35 0 другого за время менее 30 с.
Источник статьи: http://infopedia.su/15x235a.html