Устройство машин постоянного тока
Устройство статора.
Машина постоянного тока состоит из двух основных частей: неподвижной – статора и вращающейся – ротора, называемого в машинах постоянного тока якорем. Эскиз машины постоянного тока показан на рис. 1.1, а общий вид с разрезом — на рис. 1.2.


Статор состоит из станины 1, главных полюсов 2, дополнительных полюсов 3, подшипниковых щитов 4 и щеточной траверсы со щетками 6.
Станина имеет кольцевую форму и изготовляется из стального литья или стального листового проката. Она составляет основу всей машины и, кроме того, выполняет функцию магнитопровода.
Главные полюсы служат для создания постоянного во времени и неподвижного в пространстве магнитного поля. С этой целью по обмотке полюсов пропускается постоянный ток, называемый током возбуждения (в машинах малой мощности в качестве полюсов могут использоваться постоянные магниты).
Дополнительные полюсы устанавливаются между главными и служат для улучшения условий коммутации.
Подшипниковые щиты закрывают статор с торцов. В них впрессовываются подшипники и укрепляется щеточная траверса, которая с целью регулирования может поворачиваться. На щеточной траверсе закреплены пальцы, которые электрически изолированы от траверсы. На пальцах установлены щеткодержатели со щетками, изготовленными из графита или смеси графита с медью.
Устройство якоря.
Вращающаяся часть машин – якорь 9 (рис. 1.1, 1.2, а, б) состоит из сердечника 7, обмотки 8 и коллектора 5.
Сердечник имеет цилиндрическую форму. Он набирается из колец или сегментов листовой электротехнической стали, на внешней поверхности которых выштампованы пазы. В пазы сердечника укладываются секции из медного провода. Концы секций, которые выводятся на коллектор и припаиваются к его пластинам, образуют замкнутую обмотку якоря.
Коллектор (рис. 1.3) набран из медных пластин клинообразной формы, изолированных друг от друга, и корпуса 3миканитовыми прокладками 2, образующими в сборе цилиндр, который крепится на валу якоря.
 Рис. 1.3
Рис. 1.3
Источник статьи: http://electrono.ru/elektricheskie-mashiny/ustrojstvo-mashin-postoyannogo-toka
Схемы электродвигателей постоянного тока и их характеристики
 Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
1. с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ,
2. с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря,
3. с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря,
4. со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая — последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов .
Электродвигатель постоянного тока с независимым возбуждением
В этом электродвигателе (рис. 1, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения — к вспомогательному источнику в напряжением UB. В цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rn.
Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой — для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. Зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными (рис. 2, а). Следовательно, линейной будет и механическая характеристика двигателя — зависимость п (М) (рис. 2, б).
При отсутствии в цепи якоря реостата с сопротивлением Rn скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения IяΣRя в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3—5 % от Uном. Эти характеристики (прямые 1 на рис. 2, а и б) называются естественными. При включении в цепь якоря реостата с сопротивлением Rn угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным значениям Rn1, Rn2 и Rn3.
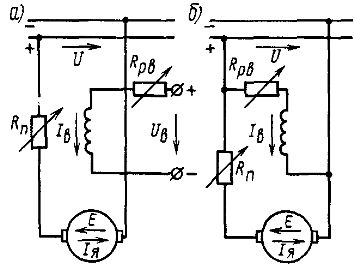
Рис. 1. Принципиальные схемы электродвигателей постоянного тока с независимым (а) и параллельным (б) возбуждением
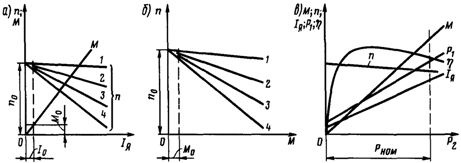
Рис. 2. Характеристики электродвигателей постоянного тока с независимым и параллельным возбуждением : а — скоростные и моментная, б — механические, в — рабочие Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом будет изменяться и частота вращения n.
В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря Iя и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания.
Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Фост от остаточного магнетизма) и э. д. с. Е и возрастает ток Iя. А так как приложенное напряжение U остается неизменным, то частота вращения n будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E= U — IяΣRя.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток Iя, и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I0, необходимый для компенсации внутренних потерь мощности, и развивает некоторый момент M0, требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше n0.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р2 (рис. 2, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря Iя и мощности Р1 от Р2 также практически линейны. Ток Iя и мощность Р1 при Р2 = 0 представляют собой ток холостого хода I0 и мощность Р0, потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин.
Электродвигатель постоянного тока с параллельным возбуждением
В этом электродвигателе (см. рис. 1, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат Rpв, а в цепь обмотки якоря — пусковой реостат Rп.
В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения Iв и магнитного потока Ф, что приводит к увеличению тока обмотки якоря Iя. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель постоянного тока с последовательным возбуждением
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 3, а), а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв.
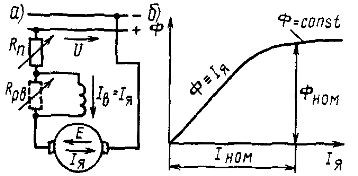
Рис. 3. Принципиальная схема электродвигателя постоянного тока с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
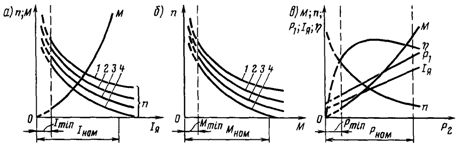
Рис. 4. Характеристики электродвигателя постоянного тока с последовательным возбуждением: а — скоростные и моментная, б — механические, в — рабочие.
Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rpв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 3, б).
При токе обмотки якоря Iя, меньшем (0,8—0,9) номинального тока Iном магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току Iя. Поэтому скоростная характеристика электродвигателя будет мягкая — с увеличением тока Iя частота вращения n будет резко уменьшаться (рис. 4, а). Уменьшение частоты вращения n, происходит из-за увеличения падения напряжения IяΣRя. во внутреннем сопротивлении Rя. цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока Iя будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току Iя. Поэтому при токе Iя, меньшем (0,8 Н- 0,9) Iном, скоростная характеристика имеет форму гиперболы, а моментная — параболы.
При токах Iя > Iном зависимости М и п от Iя линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока Iя меняться не будет.
Механическая характеристика, т. е. зависимость n от М (рис. 4, б), может быть построена на основании зависимостей n и М от Iя. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rn1, Rn2 и Rn3, при этом чем больше Rn, тем ниже располагается характеристика.
Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).
Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2 …. 0,25) Iном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой), применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.).
Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением, поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости n и М от мощности Р2 на валу электродвигателя (рис. 4, в), как следует из рассмотренных выше положений, являются нелинейными, зависимости P1, Iя и η от Р2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
Электродвигатель постоянного тока со смешанным возбуждением
В этом электродвигателе (рис. 5, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя

где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя, Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 5, б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2 (кривая 4 при малой м. д. с. параллельной обмотки).
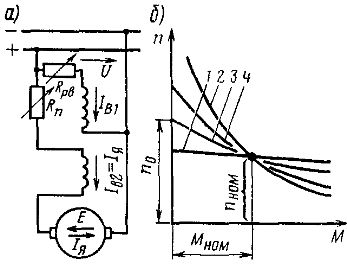
Рис. 5. Принципиальная схема электродвигателя со смешанным возбуждением (а) и его механические характеристики (б)
Достоинством двигателя постоянного тока со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл=0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).
Источник статьи: http://electricalschool.info/spravochnik/maschiny/1202-skhemy-jelektrodvigatelejj-postojannogo.html