- ТЕМА 5.7 УСТРОЙСТВО И РЕМОНТ КОНТРОЛЛЕРА МАШИНИСТА КМ-84 ЭЛЕКТРОВОЗОВ ПЕРЕМЕННОГО ТОКА ВЛ80
- Фрагмент работы с оформлением в формате PDF можно посмотреть ЗДЕСЬ
- Кинематическая схема контроллера машиниста км 84
- Контроллеры машиниста
- Электровозы и электропоезда
- Электродинамический тормоз электровозов ЧС2 Т и ЧС200

ТЕМА 5.7 УСТРОЙСТВО И РЕМОНТ КОНТРОЛЛЕРА МАШИНИСТА КМ-84 ЭЛЕКТРОВОЗОВ ПЕРЕМЕННОГО ТОКА ВЛ80
1 Краткая характеристика контроллера машиниста КМ — 84
1.1 Назначение
Контроллер машиниста предназначен для управления режимами работы электровоза. При его помощи осуществляются переключения в цепях управления.
1.2 Устройство
Контроллер машиниста КМ-84 представляет собой многопозиционный аппарат, установленный в кабине электровоза.

Рисунок 1 – Контроллер КМ 84 в кабине электровоза
Контроллер состоит из следующих основных узлов (см. рис.2): кулачковых валов, кулачковых контакторов, механической блокировки, датчика торможения, блока задатчика тормозной силы. Все эти узлы установлены между двумя рамами 5 и 7, соединенными рейками 6 и 8.Группа кулачковых контакторов 4 и соответствующий ей кулачковый вал составляют переключатель: главный 2, реверсивный 3 и тормозной 1. Кулачковые валы набираются из изоляционных прессованных шайб .
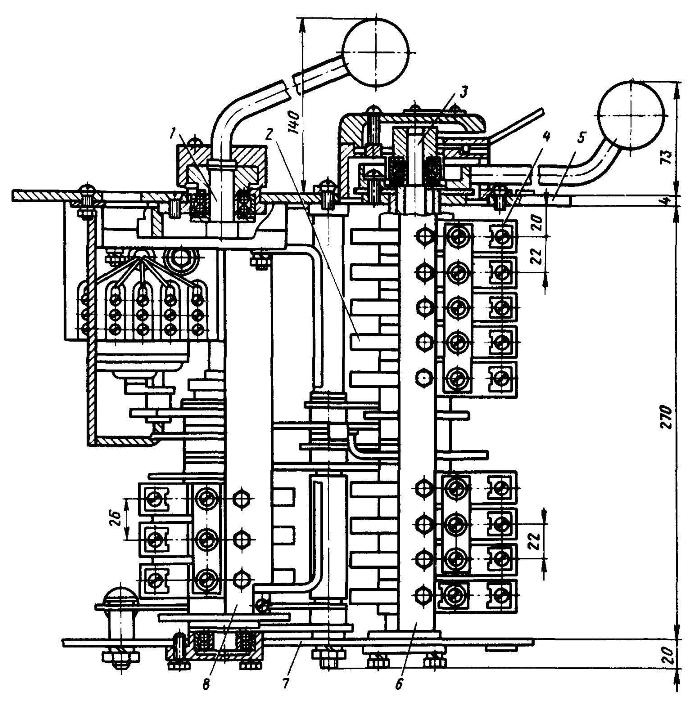
Рисунок 2 – Контроллер машиниста КМ-84
Для исключения ошибочных действий машиниста все переключатели сблокированы между собой при помощи механической блокировки, которая состоит из дисков, установленных на каждом валу, рычагов и пружин.
Механическая блокировка обеспечивает следующий порядок взаимодействия между валами (рис. 3 и 4) :
- возможность перемещения главной рукоятки в любое положение при установке реверсивной рукоятки в положения ПП (Вперед или Назад), ОП1, ОП2, ОПЗ и тормозной рукоятки в положение 0;
- возможность перемещения тормозной рукоятки в любое положение при установке реверсивной рукоятки в положение ПП <Вперед или Назад) и главной рукоятки в положение 0;
- возможность перемещения реверсивной рукоятки в положения ОП1, ОП2, ОПЗ при установке тормозной рукоятки только в положение 0, а в положение 0 при нахождении главной и тормозной рукояток в положении 0;
- невозможность перемещения главной и тормозной рукояток из положения 0 при нахождении реверсивной рукоятки в положении 0.
Фрагмент работы с оформлением в формате PDF можно посмотреть ЗДЕСЬ
В комплект входит чертеж контроллера иашиниста КМ-84 на формате А1, выполненный в программе Компас
Источник статьи: http://www.pomogala.ru/diplom/d_5.7_kontroller_km84.html
Кинематическая схема контроллера машиниста км 84
Контроллер машиниста КМ-84 электровоза BЛ80C
Назначение. Контроллер машиниста электровоза типа КМ-84 (в схеме на рис. 8.8 обозначен КМЭ, вкладка) является распорядительным аппаратом управления и служит для дистанционного управления аппаратами (реверсорами, линейными контакторами, главным контроллером, контакторами ослабления возбуждения, системой управления реостатным торможением), которые, в свою очередь, осуществляют непосредственное управление электровозом.
Устройство. Контроллер машиниста (рис. 7.1) состоит из следующих основных частей: основания, главного, реверсивного и тормозного переключателей с рукоятками привода, механических блокировок между рукоятками переключателей, а также сельсина указателя скорости и пакетного выключателя блока задатчика тормозной силы (БЗТС).
Основание — состоит из верхней и нижней стальных рам толщиной 4 мм, скрепленных между собой четырьмя рейками из силумина с помощью винтов. Верхняя рама основания укреплена к пульту шарнирно на двух петлях.
Реверсивный переключатель—состоит из кулачкового вала с четырьмя кулачковыми изоляционным шайбами. Каждая шайба имеет выре-зы и выступы для управления двумя контактными элементами типа КЭ-153, которые прикреплены к силуминовым рейкам основания, всего 7 контактов.

Рис. 7.1. Контроллер машиниста КМ-84:1 — нижняя рама основания; 2, 10 — силуминовые рейки (4 шт.) для крепления рам; 3 — тормозной переключатель; 4 — сельсин указателя скорости; 5 — верхняя рама основания; 6 — тормозная рукоятка; 7 — реверсивная рукоятка; 8 — главная рукоятка; 9 — главный переключатель; 11 — реверсивный переключатель
Контакты реверсивного переключателя главным образом включены в цепи управления реверсорами, а также в цепи управления контакторами ослабления возбуждения ТЭД. Реверсивный вал КМЭ поворачивает’ ся съемной реверсивной рукояткой и имеет следующие шесть положений:
«ПП Назад» — движение назад при полном возбуждении ТЭД;
«О» — нулевое положение;
«ПП Вперед» — движение вперед своей кабиной при полном возбуждении ТЭД;
«ОП1» — включение контакторов первой ступени ослабления возбуждения ТЭД при движении вперед;
«ОП2» — включение контакторов второй ступени ослабления возбуждения ТЭД при движении вперед;
«ОПЗ» — включение контакторов третьей ступени ослабления возбуждения ТЭД при движении вперед.
Реверсивную рукоятку можно снять только при нулевом положении вала реверсивного переключателя.
Главный переключатель — состоит из кулачкового вала с пятью кулачковыми шайбами, управляющими 10 контактными элементами. Вал выполнен в виде втулки, укрепленной на двух шарикоподшипниках сверху на реверсивном валу.
Главный вал КМЭ поворачивается главной рукояткой, жестко укрепленной на главном валу снизу реверсивной рукоятки, и имеет следующие восемь положений:
«БВ» — быстрое выключение, в этом положении происходит отключение главных выключателей на всех секциях электровоза;
«0» — нулевое положение, в этом положении происходит отключение линейных контакторов и автоматический сброс позиций до нулевой;
«АВ» — автоматическое выключение позиций главного контроллера;
«РВ» — ручное выключение позиций главного контроллера, происходит выключение (сброс) одной позиции;
«ФВ» — фиксация выключения позиций, происходит подготовка схемы к выключению (сбросу) позиции;
«ФП» — фиксация пуска, происходит подготовка схемы к пуску (набору) позиции;
«РП» — ручной пуск, происходит набор одной позиции;
«АП» — автоматический пуск, происходит автоматический набор позиций.
Оба крайних положения «БВ» и «АП» с самовозвратом (не фиксируются) — за счет двух возвратных сжатых пружин.
Тормозной переключатель — состоит из кулачкового вала с тремя кулачковыми шайбами, управляющими 5 контактными элементами. Вал укреплен в шарикоподшипниках верхней и нижней рам основания.
Тормозной вал поворачивается тормозной рукояткой КМЭ, жестко укрепленной на тормозном валу сверху и имеет следующие положения:
«О» — нулевое положение, в этом положении происходит отключение линейных контакторов и схема реостатного торможения разбирается;
«П» — подготовка, в этом положении собирается схема для реостатного торможения, однако ток через ТЭД не протекает;
«ПТ» — предварительное торможение, происходит автоматическое нарастание тормозной силы до 12 тс;
«Торможение»—нефиксируемая зона, для задания скорости торможения, крайние положения зоны — фиксируются.
Сельсин указателя скорости типа БД-1404 — служит для подачи сигнала электронному блоку управления реостатным торможением (БУРТ) о задаваемой скорости торможения. Вал сельсина приводится во вращение при вращении тормозной рукоятки в пределах нефик-сируемой зоны «Торможение» шайбой со специальным профилем, расположенной на тормозном валу.
Блок задатчика тормозной силы (БЗТС) — служит для задания тормозной силы в тс при реостатном торможении. Он представляет собой пакетный выключатель, расположенный на верхней раме КМЭ, имеет 12 положений для изменения тормозной силы от 20 тс в положении «1» до 50 тс в положении «12».
Механическая блокировка КМЭ — служит для исключения ошибочных действий машиниста при управлении электровозом. Механическая блокировка за счет рычагов с растянутыми пружинами, роликов и стальных шайб на трех валах обеспечивает следующий порядок взаимодействия между валами КМЭ:
невозможность поворота главной и тормозной рукояток из положения «0» при «0» положении реверсивной рукоятки;
возможность поворота главной рукоятки в любое положение — после поворота реверсивной рукоятки в положение «ПП Вперед» или «ПП Назад» и при «О» положении тормозной рукоятки;
возможность поворота реверсивной рукоятки в положение ОП1, ОП2, ОПЗ только при «О» положении тормозной рукоятки;
возможность поворота тормозной рукоятки в любое положение после поворота реверсивной рукоятки в положение «ПП Вперед» или «ПП Назад» и при «О» положении главной рукоятки.
Блокировочный контактный элемент типа КЭ-153 — служит для включения и отключения цепей управления (22 шт.). Он состоит из своего изоляционного основания с двумя боковыми щеками с армированной гайкой снизу — для крепления одним болтом к силу-миновой рейке основания КМЭ.
На основании контактного элемента сверху укреплен неподвижный блокировочный контакт в виде напайки на головке болтика. Снизу на оси между боковыми щеками основания шарнирно укреплен рычаг в виде коромысла. На этом рычаге сверху шарнирно укреплен подвижный блокировочный контакт в виде пружинящей пластинки с напайкой из серебра и гибким шунтом к выводу. На нижнем конце рычага укреплен ролик в виде шарикоподшипника—против кулачковой шайбы реверсивного, главного или тормозного вала.
С другой стороны в конец рычага упирается сжатая включающая пружина между щеками основания.
Включение контактного элемента происходит за счет включающей пружины, когда к ролику рычага подходит вырез кулачковой шайбы вала.
Отключение контактного элемента происходит при повороте реверсивного, главного или тормозного вала КМЭ, когда выступ кулачковой шайбы вала нажимает на ролик рычага.
Источник статьи: http://www.sinref.ru/000_uchebniki/05301_transport_jd_elektrovozi/100_ustroistvo_i_rabota_elektrovoz_vl80c_nikolaev_2006/095.htm
Контроллеры машиниста
Контроллеры машиниста служат для дистанционного (косвенного) управления работой тяговых двигателей в тяговом и тормозном режимах; с их помощью подключают к источнику низкого напряжения и отключают в определенной последовательности провода цепи управления, т. е. включают и выключают в определенной последовательности высоковольтные аппараты при пуске, регулировании скорости движения, остановке, изменении направления движения и электрическом торможении электровоза или электропоезда. Контроллер машиниста имеет ряд рукояток, каждая из которых предназначена для определенных операций управления и имеет несколько фиксированных позиций, соответствующих определенным включениям аппаратов силовой цепи.
При конструировании контроллеров должны быть соблюдены требования, обеспечивающие простоту и легкость пользования ими и наиболее простую кинематику блокировочных механизмов; наименьшие массу и габаритные размеры аппарата; надежность работы его переключающих устройств, удобство осмотра и ремонта всех его деталей. Распределение функций управления и расположение отдельных рукояток контроллера выполняют так, чтобы обеспечить простоту и удобство пользования ими и не допускать отвлечения машиниста от наблюдения за сигналами, путем и контактной сетью. Механические блокировки в контроллере создают взаимозависимость между рукоятками, что предотвращает ошибочные действия машиниста.
Одну из рукояток, чаще всего реверсивную или реверсивно-селективную, на каждом контроллере машиниста делают съемной. Съемная рукоятка может быть снята с аппарата только в нулевом поло жении, в которое ее можно поставить после возвращения других рукояток также в нулевое положение. Контроллер машиниста устанавливают в каждой кабине управления, а реверсивную или реверсивно-селективную рукоятку выдают одну на все контроллеры состава. Поэтому машинист не может случайно оставить какую-либо рукоятку на одном из контроллеров во включенном положении, так как это вызвало бы нарушение правильной работы электрических цепей при управлении составом с другого контроллера.
По конструкции различают контроллеры машиниста барабанные, кулачковые и бесконтактные.
В барабанных контроллерах (рис. 217, а) замыкание и размыкание цепей проводов управления осуществляют сегментами 2 при повороте барабана 1 на определенный угол. К сегменту 2 прижимаются пальцы 3, которые соединены с соответствующими проводами цепи управления. Пальцы укреплены на стойке 4
В кулачковых контроллерах (рис. 217, б) замыкание и размыкание цепей проводов управления осуществляют кулачковые контакторы (контакторные элементы), укрепленные на стойке 4, на которые воздействуют кулачковые шайбы 11.
При вращении рукояткой вала 12 контроллера кулачковая шайба 11 своим выступом 9 нажимает на ролик 8 и размыкает цепь контактами 5 и 6, к которым присоединены провода цепи управления. Как только выступ шайбы пройдет ролик, пружина 7 повернет рычаг 10 и снова замкнет контакты 5 и 6.
В барабанных контроллерах при скольжении пальцев по поверхности сегментов сильно изнашиваются их контактные поверхности. Износ увеличивается с увеличением длины пути скольжения пальцев, а также при образовании дуги


Рис. 217. Схемы кулачковых контакторов контроллеров машиниста на контактах. В этом отношении контроллеры барабанные уступают кулачковым, которые применяют на всем отечественном э. п, с. В качестве примера рассмотрим кулачковые контроллеры машиниста 1 КУ.019, КМ-84 и КМЭ-8.
Контроллер 1 КУ.019 электропоездов ЭР2Р и ЭР2Т каркасной конструкции имеет основание 22 (рис. 218, а) и крышку 14, соединенные вертикальными стальными угольниками 6 и 17.
На крышке сверху закреплена декоративная крышка 13, на ней выдавлены обозначения направления движения поезда и положений главного вала. На крышке размещен ограничитель 8 поворота съемной реверсивной рукоятки 9. На рейках 3 и 18 установлены кулачковые контакторы 4 к 19 типа КЭ-42, а на угольнике 17 — контактные пальцы 16. Контакторы закрыты кожухом 21 с замками 5 и соединены с поездными проводами разъемом 1, состоящим из колодки и вставки. Реверсивная рукоятка имеет три фиксированных положения: два рабочих — Вперед и Назад и нулевое; главная рукоятка — 11 таких положений: нулевое, маневровое, четыре ходовых и пять тормозных. С помощью реверсивной и главной рукояток управляют соответствующими кулачковыми валами 10 и 11, представляющими собой стальные стержни с насаженными на них кулачковыми шайбами 20, контактными кольцами 15, деталями 7 фиксации и механической блокировки валов. Реверсивный вал 10 установлен в подшипниках, запрессованных в крышку и кронштейн 2, закреп ленный на угольнике 6, а главный вал — в подшипниках, запрессованных в крышку и основание 22. Для исключения ошибочных действий машиниста реверсивный и главный валы механически сблокированы таким образом, что поворот реверсивного вала возможен только при нулевом положении главного, а поворот главного — только при рабочем положении (Вперед или Назад) реверсивного.
При нулевом положении реверсивного и главного валов ролик фиксатора 24 (рис. 218, б) входит в среднюю впадину храповика 25, жестко установленного на реверсивном валу. Одновременно конец фиксатора входит во впадину колеса 23, жестко установленного на главном валу 12, и запирает вал в нулевом положении. При установке реверсивной рукоятки в положение, соответствующее направлению движения поезда, вместе с реверсивным валом повернется храповик. Ролик фиксатора выйдет из средней впадины храповика и войдет под действием пружины 26 в более глубокую впадину. При этом конец фиксатора выйдет из впадины колеса, позволяя поворачивать главный кулачковый вал.
В свою очередь реверсивную рукоятку из крайнего положения перевести в среднее (нулевое) можно лишь в нулевом положении главного вала, так как только в этом случае впадина колеса находится против конца фиксатора. Фиксатор 27 обеспечивает фиксацию позиций главного вала, когда реверсивный вал находится в положении Вперед или Назад.
Главная рукоятка состоит из прессованного пластмассового корпуса 28 (рис. 218, в), прессованной волокнитовой головки 30, кнопки 31 и механизма электрической блокировки безопасности. При нажатии машинистом на кнопку 31 рукоятка перемещается вниз, преодолевая усилие пружины 32. Вместе с кнопкой перемещается ось 33, которая давит на ролик микропереключателя 29 и замыкает цепь блокировки безопасности. При этом раздается щелчок. Если машинист продолжает нажимать на кнопку, она перемещается вниз до соприкосновения с горизонтальной площадкой головки 30. Ось 33 скользит по ролику и удерживает микропереключатель во включенном положении. Когда машинист перестанет нажимать на кнопку, пружина 32 возвратит механизм в исходное положение, цепь блокировки безопасности разомкнется.
Контроллеры машиниста 1КУ.021 и 1КУ-023 электропоездов ЭР2 и ЭР9М
по конструкции и внешнему виду аналогичны контроллеру 1КУ.019. Они отличаются от него в основном числом фиксированных положений главной рукоятки и соответственно числом кулачковых контакторов на главном валу.
Все узлы контроллера машиниста КМ-84 электровоза ВЛ80 С смонтированы между двумя рамами 1 и 4 (рис. 219, а), соединенными рейками 11 и 12. Группы кулачковых контакторов 2 и 9 приводятся в действие валами, которые соединены со своими рукоятками — главной 10, тормозной 7 и реверсивной 8. Рукоятка 8 съемная. Каждый вал состоит из стальной оси и насаженных на нее кулачковых изоляционных прессованных шайб 6. Все валы сблокированы между собой механически (рис. 219, б, в и г) с помощью дисков 14, 18, 21, рычагов 20, валов 5, 13, 17, 22, пружин и защелок 16, 19, 23 с пазами 15. Эти блокировки обеспечивают следующее:

Рис. 218. Контроллер машиниста 1КУ.019 электропоездов ЭР2Р и ЭР2Т
возможность перемещения главной рукоятки 10 (см. рис. 219, а) в любое положение при установке реверсивной 8 в положения ПП (Вперед или Назад), ОП1, ОП2, ОПЗ и тормозной рукоятки 7 в положение 0;
возможность перемещения тормозной рукоятки 7 в любое положение при установке реверсивной 8 в положение ПП (Вперед или Назад) и главной 10 в положение 0\
возможность перемещения реверсивной рукоятки 8 в положения ОП1, ОП2, ОПЗ при установке тормозной рукоятки 7 только в положение 0, а в положении 0 при установке главной 10 и тормозной 7 рукояток в положение 0\ невозможность перемещения главной

10 и тормозной 7 рукояток при нахождении реверсивной 8 в положении 0.
Главный вал 22 расположен соосно с реверсивным 17, имеет положения: 0 — нулевое, АВ — автоматическое выключение, РВ — ручное выключение, ФВ — фиксация выключения, ФП — фиксация пуска, РП — ручной пуск, АП — автоматический пуск, БВ — быстрое выключение.
Положения 0, АВ, РВ, ФВ, ФП, РП — фиксированные, положения АП и БВ с самовозвратом.
Реверсивный вал 17 имеет положения 0 — нулевое; ПП (Вперед) — полное возбуждение; ОП1, ОП2, ОПЗ — соответственно первая, вторая, третья ступени ослабления возбуждения; ПП (На-

Рис 219. Общий вид (а), механические блокировки реверсивного и тормозного валов (б), главного, реверсивного и тормозного валов (в) и кинематическая схема контроллера машиниста КМ-84 электровоза ВЛ80 С (г)
5 — рукоятка главного вала,
6 — рукоятка тормозного вала; 7 — сектор зубчатый рукоятки тормозного вала, & — крышка (литая); 9 и 10 — стальные планкн, 11 — кулачковые контакторы, 12 — кнопка в торце рукоятки для выдержки времени при переходе с одного соединения тяговых двигателей на другое, 13 — фиксатор, 14 — сектор зубчатый рукоятки главного вала,15 — съемная рукоятка реверсивно-селективного вала

зад) — полное возбуждение. Все позиции реверсивного переключателя фиксированные.
Тормозной вал 13 устанавливается в следующие фиксированные положения: 0 — нулевое, Я — подготовка цепи к торможению, ПТ — предварительное торможение с тормозной силой до 12-10 4 Н (12 тс), Торможение. Положения 0, П, ПТ и крайние положения зоны Торможение фиксированные, положения зоны Торможение нефиксированные На валу 13 установлена профильная шайба, с помощью которой производится поворот ротора сельсина-датчика торможения 3; от угла поворота а тормозного вала зависит напряжение /7ВЫХ (например, при а = 270° напряжение /7аых = 0, при а = 60° -11вых = 24,5 В)
Контроллеры машинистов электровозов ВЛ80 Т по конструкции аналогичны контроллеру КМ-84. Конструкция контроллера электровозов ВЛ8, ВЛ10, ВЛ10 У пояснена рис. 220.
Электровозы и электропоезда
Электродинамический тормоз электровозов ЧС2 Т и ЧС200
Рассмотрены устройство и работа основного электронного оборудования, применяемого в электродинамическом (реостатном) тормозе системы «Шкода». Применительно к электродинамическому тормозу электровозов ЧС2 Т и его модификации на скоростном электровозе ЧС200
Источник статьи: http://poezdvl.com/ehlektrovozy-i-ehlektropoezda-kalinin/kontrollery-mashinista.html