Режимы работы (двигательный, генераторный, торможение) двигателя постоянного тока ДПТ

В двигателях параллельного возбуждения при неизменном токе в обмотке возбуждения (IВ = const ) магнитный поток изменяется при нагрузке весьма незначительно, поэтому с некоторым приближением можно принять Ф = const . В этом случае электромагнитный момент [см. (25.24)] пропорционален току в цепи якоря и механическая характеристика n = f(M) может быть представлена зависимостью n = f(Ia) (рис. 29.8). Если эту характеристику продолжить в обе стороны за пределы осей координат (прямая 1), то можно показать, что электрическая машина в зависимости от величины и знака внешнего момента, действующего на ее вал со стороны связанного с ним механизма, может работать в трех режимах: двигательном, тормозном и генераторном.
При работе двигателя без нагрузки ток в цепи якоря Ia0 небольшой. При этом частота вращения n = n0 (точка А). Затем с появлением на валу двигателя нагрузочного момента, противодействующего вращающему, ток в цепи якоря возрастает, а частота вращения уменьшается. Если увеличить противодействующий момент до значения, при котором якорь двигателя остановится (точка В), то ЭДС Ea = 0 и ток двигателя достигает значения 
Если двигатель применяют для привода механизма, нагрузочный момент которого может быть больше вращающегося (например, привод барабана, на который наматывается трос с грузом), то при последующем увеличении нагрузочного момента этого механизма якорь машины вновь начнет вращаться, но теперь уже в другую сторону. Теперь момент, действующий на вал электрической машины со стороны нагрузочного механизма, будет вращающим, а электромагнитный момент машины — тормозящим, т. е. электрическая машина перейдет в тормозной режим. При работе машины в этом режиме ЭДС якоря действует согласованно с напряжением, т. е.
При использовании машины в тормозном режиме необходимо принять меры для ограничения тока якоря. С этой целью в цепь якоря включают добавочное сопротивление, величина которого обеспечивает получение искусственной характеристики двигателя, пересекающейся с осью абсцисс при токе якоря  (штриховая прямая).
(штриховая прямая).
Если при работе двигателя в режиме х.х. к его валу приложить момент, направленный в сторону вращения якоря, то частота вращения, а следовательно, и ЭДС Ea начнут возрастать. Когда ЭДС Ea = U , машина не будет потреблять тока из сети (точка С) и частота вращения якоря достигает значения, называемого пограничной частотой вращения nxx
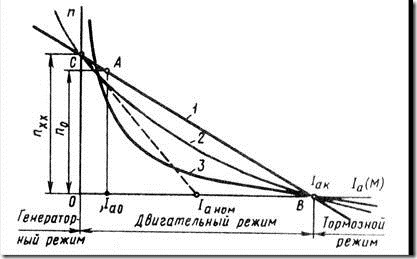
Рис. 29.8. Режимы работы машины постоянного тока:
1 — с параллельным (независимым) возбуждением;
2 — со смешанным возбуждением;
3 — с последовательным возбуждением
При дальнейшем увеличении внешнего момента на валу машины ЭДС Ea станет больше напряжения, а в цепи якоря опять возникает ток, но другого направления. При этом машина перейдет в генераторный режим: механическая энергия, затрачиваемая на вращение якоря, будет преобразовываться в электрическую и поступать в сеть.
Перевод машины из двигательного в генераторный режим используют для торможения двигателя, так как в генераторном режиме электромагнитный момент является тормозящим (рекуперативное торможение).
Источник статьи: http://electrikam.com/rezhimy-raboty-dvigatelnyj-generatornyj-tormozhenie-dvigatelya-postoyannogo-toka-dpt/
Работа машины постоянного тока в режиме двигателя
При работе машины постоянного тока в режиме двигателя обмотка якоря подключается к источнику постоянного тока UЯ.
Вследствие взаимодействия тока протекающего в активных проводниках обмотки якоря с магнитным потоком возбуждения на валу машины возникает момент электромагнитных сил (см.2.16), который при работе машины в режиме двигателя является вращающим моментом
Якорь двигателя начинает вращаться в направлении определяемом направлением вектора вращающегося момента. Для изменения направления вращения следует изменить либо направление тока в якоре (полярность напряжения подведенного к якорю), либо направление магнитного потока возбуждения (полярность напряжения подведенного к обмотке возбуждения).
Двигатели постоянного тока могут включаться (см. рис. 2.13), по схемам с независимым, параллельным), последовательным или смешанным возбуждением. Применяются также двигатели с возбуждением от постоянных магнитов.
Схемы с параллельным, последовательным и смешанным возбуждением применяются в основном в приводах с нерегулируемой или регулируемой в небольших пределах скоростью вращения. В регулируемых приводах как правило применяются двигатели с независимым возбуждением или с постоянными магнитами.
При вращении якоря в его обмотке индуктируется ЭДС EЯ определяемая выражением (2.13). У двигателя эта ЭДС является противоэлектродвижущей силой и направлена против напряжения, подведенного к якорю.
Напряжение, подведенное к якорю, уравновешивается этой противо — ЭДС и падением напряжения на активном сопротивлении якоря.
 (2.21)
(2.21)
Отсюда находим уравнение частотной (скоростной) характеристики двигателя n(IЯ).
 (2.22)
(2.22)
Подставляя в (2.22) IЯ из (2.20) получаем уравнение механической характеристики двигателя n(M).
 (2.23)
(2.23)
Из уравнения (2.23) следует, что скорость вращения можно регулировать следующими способами
1. Изменением сопротивления цепи якоря. Способ легко реализуется включением реостата последовательно в цепь якоря. Однако этот способ во первых не экономичен, вследствие потерь энергии в реостате, а кроме того снижает жесткость механических характеристик (усиливается зависимость скорости от момента нагрузки). На рис. 2.16 приведены механические характеристики двигателя при отсутствии (RР =0) и наличии (RР >0) регулировочного сопротивления RР в цепи якоря.
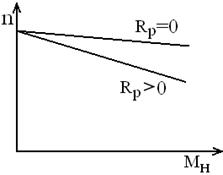
Рисунок 2.16 – Механические характеристики двигателя
2. Изменением магнитного потока возбуждения путем изменения напряжения на обмотке возбуждения. Однако при этом регулировочная характеристика является нелинейной, а кроме того при изменении потока возбуждения изменяется вращающий момент на валу двигателя.
3. Изменением напряжения подводимого к якорю. Данный способ является наиболее рациональным, так как обеспечивает регулирование скорости в широких пределах при сохранении практически неизменным вращающего момента и сохранении жесткости механических характеристик.
Способ чаще всего реализуется применением управляемого тиристорного выпрямителя или транзисторного импульсного регулятора напряжения с широтно – импульсной модуляцией.
Двигатель постоянного тока обладает свойством саморегулирования – при изменении нагрузки автоматически устанавливается новое значение скорости, при которой двигатель работает устойчиво. Роль регулятора играет противо – ЭДС в обмотке якоря. В установившемся режиме вращающий электромагнитный момент двигателя равен статическому моменту нагрузки
(МЕ = МС). Ток, потребляемый двигателем, в соответствии с (2.20), определяется моментом на валу двигателя:
 (2.24)
(2.24)
Статический момент нагрузки МС включает в себя момент нагрузки МН и момент потерь холостого хода М0 , обусловленный трением в подшипниках, трением щеток и потерями в якоре на вихревые токи.
C ростом момента на валу уменьшается (см. 2.23) скорость вращения двигателя n и противо – ЭДС Е, а потребляемый ток будет возрастать, пока при новом значении скорости не восстановится равенство (2.21). При уменьшении момента на валу уменьшится ток IЯ , что, в соответствии с (2.21) приведет (при UЯ = const) к возрастанию Е за счет роста скорости.
Таким образом изменение момента нагрузки приводит к некоторому изменению скорости вращения двигателя, то есть механическая характеристика двигателя n = f(MН) является пологопадающей. Для обеспечения стабильной скорости вращения (жесткости механической характеристики) электропривод следует выполнять с системой стабилизации скорости (частоты) вращения.
Дата добавления: 2015-02-10 ; просмотров: 1111 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник статьи: http://helpiks.org/2-50586.html
Работа машины постоянного тока в режиме двигателя
§ 113. РАБОТА МАШИНЫ ПОСТОЯННОГО ТОКА В РЕЖИМЕ ДВИГАТЕЛЯ
При включении двигателя постоянного тока в сеть под действие ем приложенного напряжения протекает ток как в обмотке якоря, так и в обмотке возбуждения. Ток возбуждения возбуждает магнитный поток полюсов.
В результате взаимодействия тока в проводниках обмотки якоря с магнитным полем полюсов создается вращающий момент и якорь машины приходит во вращение. Таким образом, электрическая энергия, полученная машиной из сети источника энергии, преобразуется в энергию механическую.
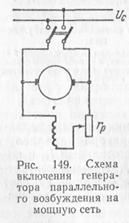
Механические силы создаются в результаты взаимодействия магнитного поля полюсов с токами в проводах обмотки якоря. Проводники обмотки якоря уложены в пазах, т. е. окружены сталью зубцов якоря, и эти силы в основном будут приложены к зубцам, так как магнитная проницаемость стали зубцов во много раз больше магнитной проницаемости немагнитной среды пазов, в которой находятся проводники обмотки якоря. Положим, что генератор параллельного возбуждения работает на сеть большой мощности (рис. 149). Ток нагрузки генератора определяется следующим выражением:

где I — ток в обмотке якоря,
rн — сопротивление цепи этой обмотки,
E —э. д. с, индуктируемая в этой же обмотке,
U — напряжение сети.
Направление э. д. с. и тока в активных проводах якоря показало на схеме (рис. 150,а). Машина развивает электромагнитный момент Мэ, являющийся тормозным, т. е. потребляет механическую энергию и вырабатывает энергию электрическую.
Если посредством регулировочного сопротивления понизить ток возбуждения, то уменьшится как магнитный поток, так и э. д. с, индуктируемая в обмотке якоря. Это вызовет уменьшение нагрузки генератора. Изменяя сопротивление регулировочного реостата, можно довести ток возбуждения до такой величины, при которой э. д. с. в обмотке якоря равна напряжению сети (Е=U)) и ток в якоре равен нулю, т. е. генератор работает вхолостую.
Если ток возбуждения окажется меньше тока, соответствующего холостой работе генератора, то э. д. с. обмотки якоря будет меньше напряжения сети, и ток в якоре изменит направление на обратное (рис. 150, б).
При изменении направления I тока в проводниках обмотки  якоря также изменится направление электромагнитного момента Мэ, развиваемого машиной, т. е. момент станет вращающим. Таким образом, машина, потребляя электрическую энергию, вырабатывает энергию механическую, т. е. работает двигателем.
якоря также изменится направление электромагнитного момента Мэ, развиваемого машиной, т. е. момент станет вращающим. Таким образом, машина, потребляя электрическую энергию, вырабатывает энергию механическую, т. е. работает двигателем.
Если отключить первичный двигатель, то якорь машины будет продолжать вращаться под действием развиваемого электромагнитного момента Мэ.
При вращении якоря в проводниках его обмотки индуктируется э. д. с, направление которой противоположно направлению тока. Поэтому ее называют противо-э. д. с. или обратной э. д. с. Противо-э. д. с. играет роль регулятора потребляемой мощности, т. е. изменение потребляемого тока происходит вследствие изменения противо-э. д. с. Противо-э. д. с. равна:

Вращающий момент, развиваемый двигателем,

Приложенное напряжение уравновешено противо-э. д. с. и падением напряжения в сопротивлении обмотки якоря и щеточных Контактов. Поэтому для двигателя уравнение равновесия э. д. с. примет следующий вид:

где Е — составляющая приложенного напряжения, которая уравн0ч вешивает противо-э. д. с, т. е. величина, обратная противо. э. д. с. Ток в обмотке якоря
определяется следующим выражением

Число оборотов якоря двигателя

Условием установившегося режима работы двигателя является равенство моментов вращающего и тормозного. Если вращающий момент, развиваемый двигателем Мэ, уравновешен тормозным моментом на валу Мт, то скорость вращения якоря остается постоянной. При нарушении равновесия моментов появляется дополнительный момент, создающий положительное или отрицательное ускорение вращения якоря.
Если увеличить нагрузку (тормозной момент на валу двигателя Мт),то равновесие моментов нарушится (МЭ Мэ), скорость вращения уменьшается непрерывно до остановки двигателя. Такие случаи могут возникать при больших тормозных моментах на валу и значительных понижениях напряжения сети.
При уменьшении нагрузки на валу двигателя (МЭ>Мт) скорость вращения якоря начнет увеличиваться, что вызывает увеличение противо-э. д. с. в его обмотке. Ток в обмотке якоря начнет уменьшаться, уменьшая вращающий момент двигателя. Изменение скорости, противо-э. д. с. и тока в якоре будет протекать также до восстановления равновесия моментов (Мэ=Мт).
Однако в двигателях постоянного тока сравнительно часто создаются условия, при которых равновесие моментов не восстанавливается при любом изменении скорости, так что вращающий момент всегда остается больше тормозного момента на валу двигателя (МЭ>Мт). В таких случаях скорость вращения якоря непрерывно увеличивается, теоретически стремясь к бесконечности. Практически при значительном превышении номинальной скорости машина разрушается — разрываются бандажи, скрепляющие лобовые соединения обмотки, проводники обмотки выходят из пазов и т. д. Такой аварийный режим называется разносом двигателя.
Направление вращения якоря двигателя зависит от полярности полюсов и от направления тока в проводниках обмотки якоря.
Таким образом, для реверсирования двигателя, т. е. для изменения подавления вращения якоря, нужно либо изменить полярность ролюсов, переключив обмотку возбуждения, либо изменить направление тока в обмотке якоря.
Обмотка возбуждения обладает значительной индуктивностью, переключение ее нежелательно. Поэтому реверсирование двигателей постоянного тока обычно заключается в переключении обмотки якоря.
Источник статьи: http://servomotors.ru/documentation/electrical_engineering/1/10_113.html