- Классификация и характеристики электродвигателей
- Классы электродвигателей:
- Таблица классификации электронных двигателей:
- Электродвигатели постоянного тока
- Электродвигатели переменного тока
- Асинхронные электродвигатели
- Синхронные двигатели переменного тока
- Универсальные двигатели
- Электродвигатели
- Конструкция электродвигателя
- Принцип работы электродвигателя
- Классификация электродвигателей
- Типы электродвигателей
- Коллекторные электродвигатели
- Универсальный электродвигатель
- Коллекторный электродвигатель постоянного тока
- Бесколлекторные электродвигатели
- Асинхронный электродвигатель
- Cинхронный электродвигатель
- Специальные электродвигатели
- Серводвигатель
- Основные параметры электродвигателя
- Момент электродвигателя
- Мощность электродвигателя
- Механическая мощность
- Коэффициент полезного действия электродвигателя
- Частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- Механическая характеристика
- Сравнение характеристик внешне коммутируемых электрических двигателей
- Области применения электродвигателей
Классификация и характеристики электродвигателей
Электродвигатель – устройство для преобразования электроэнергии во вращательное движение вращающейся части электрической машины. Преобразование энергии в двигателях происходит за счет взаимодействия магнитных полей обмоток статора и ротора. Эти электрические машины широко используются во всех отраслях промышленности, в качестве привода электротранспорта и инструментов, в системах автоматизации, бытовой техники и так далее.
Существует множество видов электродвигателей, различающихся по принципу действия, конструкции, исполнению и другим признакам. Рассмотрим основные типы этих электрических машин.
По принципу действия различают магнитоэлектрические и гистерезисные электрические машины. Несмотря на простоту конструкции, высокий пусковой момент, последние не получили широкого распространения. Эти электродвигатели имеют высокую цену, низкий коэффициент мощности, ограничивающие их применение. Подавляющее большинство выпускаемых электродвигателей – магнитоэлектрические.
По типу напряжения питания различают:
- Электродвигатели постоянного тока.
- Двигатели переменного тока.
- Универсальные электрические машины.
По конструкции различают электродвигатели с горизонтально и вертикально расположенным валом. Кроме того, электрические машины классифицируют по назначению, климатическому исполнению, степени защиты от попадания влаги и посторонних предметов, мощности и другим параметрам.
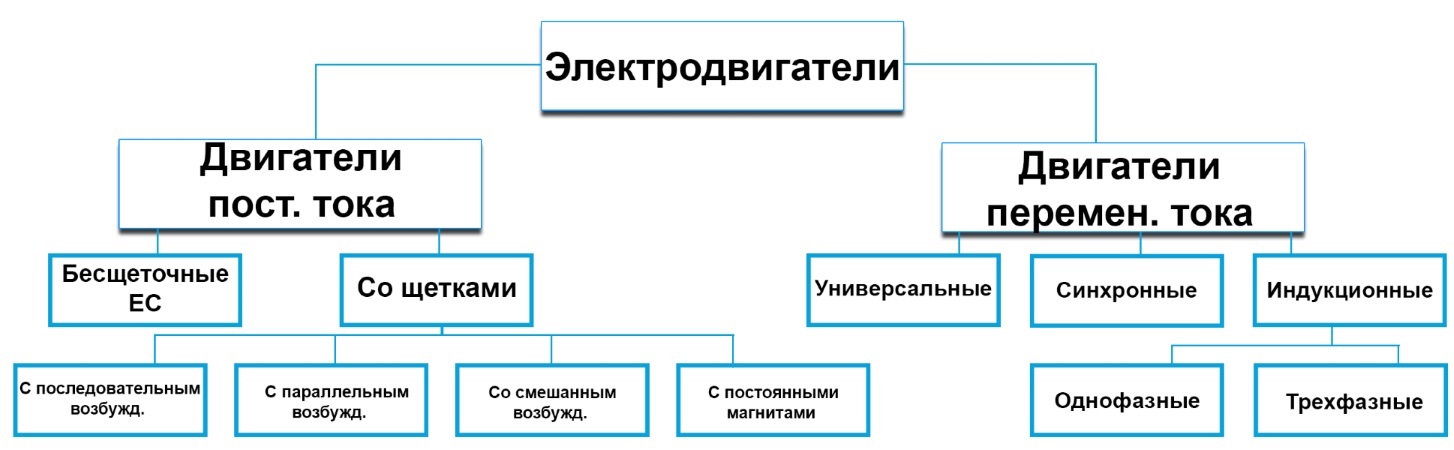
Классы электродвигателей:
- Постоянного тока
- Бесщеточные ЕС (электронно-коммутируемые)
- Со щетками
- С последовательным возбуждением
- С параллельным возбуждением
- Со смешанным возбуждением
- С постоянными магнитами
- Переменного тока
- Универсальные
- Синхронные
- Индукционные
- Однофазные
- Трехфазные
Таблица классификации электронных двигателей:
Электродвигатели постоянного тока
Двигатели постоянного тока широко применяются в качестве привода электротранспорта, промышленного оборудования, а также микропривода исполнительных механизмов. Такие электрические машины обладают следующими преимуществами:
- Возможность регулировки частоты вращения путем изменения напряжения в обмотке возбуждения. При этом крутящий момент на валу ДПТ (двигатели постоянного тока) остается неизменным.
- Высокий к.п.д. (коэффициент полезного действия) у машин постоянного тока несколько выше, чем у самых распространенных асинхронных двигателей переменного тока. При неполной нагрузке на валу к.п.д. ДПТ выше на 10-15%.
- Возможность изготовления ДПТ небольших габаритов. Практически все используемые микроприводы рассчитаны на постоянный ток.
- Простота схем управления. Для пуска, реверса и регулирования скорости и момента не требуется сложного электронного оборудования и большого количества аппаратов для коммутации.
- Возможность работы в режиме генератора. Электродвигатели такого типа можно использовать в качестве источников постоянного тока.
- Высокий пусковой момент. ДПТ используют в составе электроприводов кранов, тяговых и грузоподъемных механизмов, где требуется запуск под значительной нагрузкой.
ДПТ различают по способу возбуждения, они бывают:
- С постоянными магнитами. Такие двигатели отличаются малыми габаритами. Основная область их применения – микроприводы.
- С электромагнитным возбуждением.
Электрические машины с электромагнитами такого типа получили самое широкое распространение. Их классифицируют по способу подключения обмотки статора:
- Двигатели с параллельным возбуждением. Обмотки якоря и статора в электрической машине такого типа соединены параллельно. Такие электрические машины не требуют дополнительного источника питания для обмотки возбуждения, скорость вращения ротора практически не зависит от нагрузки. Их используют для привода металлорежущих станков и другого оборудования.
- Электродвигатели с последовательно включенной обмоткой статора. ДПТ этого типа имеют значительный пусковой момент. Их применяют в качестве привода электротранспорта и промышленных установок с необходимостью пуска под нагрузкой.
- Двигатели с независимым возбуждением. Для питания обмотки статора таких электромашин используется независимый источник постоянного тока. ДПТ такого типа отличаются широким диапазоном регулирования скоростей.
- Электрические машины со смешанным возбуждением. Электромагнит возбуждения в таких двигателях поделен на 2 части. Одна из них включена параллельно, вторая последовательно обмотке якоря. Электрические машины такого типа используются в механизмах и оборудовании, где необходим высокий пусковой момент, а также переменная и постоянная скорость при переменном моменте.
Электродвигатели переменного тока
Электрические машины такого типа широко используют для приводов всех типов технологического оборудования, электроинструментов, автоматических регуляторов. По наличию разности между скоростью вращения магнитного поля статора и частотой вращения ротора различают синхронные и асинхронные двигатели.
Асинхронные электродвигатели
Благодаря дешевизне и простоте конструкции электрические машины такого типа получили самое широкое распространение. Их принципиальное отличие – наличие так называемого скольжения. Это разность между частотой вращения магнитного поля неподвижной части электрической машины и скоростью вращение ротора. Напряжение на вращающейся части индуцируется за счет переменного магнитного поля обмоток статора двигателя. Вращение вызывает взаимодействие поля электромагнитов неподвижной части и магнитного поля ротора, возникающего под влиянием наведенных в нем вихревых токов. По особенностям обмоток статора выделяют:
- Однофазные двигатели переменного тока. Двигатели такого типа требуют для пуска наличия внешнего фазосдвигающего элемента. Это может быть пусковой конденсатор или индуктивное устройство. Область применения однофазных двигателей – маломощные приводы.
- Двухфазные электрические машины. Такие двигатели имеют 2 обмотки со смещенными относительно друг друга фазами. Их также используют для бытовых устройств и оборудования, имеющего небольшую мощность.
- Трех- и многофазные электродвигатели. Наиболее распространенный тип асинхронных машин. Электрические двигатели такого типа имеют от 3-х и более обмоток статора, сдвинутых по фазе на определенный угол.
По конструкции ротора асинхронные электрические машины делят на двигатели с короткозамкнутым и фазным ротором.
Обмотка ротора электрических машин первого типа представляет собой несколько неизолированных стержней, выполненных из сплавов меди или алюминия, замкнутых с двух сторон кольцами (конструкция “беличья клетка”). Асинхронные двигатели такого типа обладают следующими преимуществами:
- Достаточно простая схема пуска. Такие электрические машины можно подключать непосредственно к электрической сети через аппараты коммутации.
- Допустимость кратковременных перегрузок.
- Возможность изготавливать электрические машины высокой мощности. Двигатель такого типа не содержит скользящих контактов, препятствующих наращиванию мощности.
- Относительно простое ТО и ремонт. Асинхронные электромашины имеют несложную конструкцию.
- Невысокая цена. Двигатели асинхронного типа стоят дешевле синхронных машин и ДПТ.
Электрические машины с короткозамкнутым ротором имеют свои недостатки:
- Предельная скорость вращения составляет не более 3000 об/мин при входе в синхронный режим.
- Технически сложная реализация регулирования частоты вращения.
- Высокие пусковые токи при прямом запуске.
Электродвигатели с фазным ротором частично лишены недостатков, присущих машинам с ротором конструкции “беличья клетка”. Вращающаяся часть электрической машины такого типа имеет обмотки, соединенные в схему “звезда”. Напряжение подводится к обмотке через 3 контактных кольца, закрепленных на роторе и изолированных от него.
Такие электродвигатели обладают следующими достоинствами:
- Возможность ограничивать пусковые токи при помощи резистора, включенного в цепь электромагнитов ротора.
- Больший, чем у электромашин с короткозамкнутым ротором, пусковой момент.
- Возможность регулировки скорости.

Недостатками таких двигателей являются относительно большие габариты и масса, высокая цена, более сложный ремонт и сервисное обслуживание.
Синхронные двигатели переменного тока
Как и в асинхронных электродвигателях, вращение ротора в синхронных машинах достигается взаимодействием полей ротора и статора. Скорость вращения ротора таких электрических машин равна частоте магнитного поля, создаваемого обмотками статора.
Обмотка неподвижной части двигателя рассчитана на питание от трехфазного напряжения. К электромагнитам ротора подключается постоянное напряжение. Различают явнополюсные и неявнополюсные обмотки. В синхронных двигателях малой мощности используют постоянные магниты.
Запуск и разгон синхронной машины осуществляется в асинхронном режиме. Для этого на роторе двигателя имеется обмотка конструкции “беличья клетка”. Постоянное напряжение подается на электромагниты только после разгона до номинальной частоты асинхронного режима. Синхронные двигатели имеют следующие особенности:
- Постоянная скорость вращения при переменной нагрузке.
- Высокий к.п.д. и коэффициент мощности.
- Небольшая реактивная составляющая.
- Допустимость перегрузки.
К недостаткам синхронных электродвигателей относятся:
- Высокая цена, относительно сложная конструкция.
- Сложный пуск.
- Необходимость в источнике постоянного напряжения.
- Сложность регулировки скорости вращения и момента на валу.
Все недостатки электрических машин переменного тока можно исправить установкой устройства плавного пуска или частотного преобразователя. Обоснование выбора того или иного устройства обусловлено экономической целесообразностью и требуемыми характеристиками электропривода.
Универсальные двигатели
В отдельную группу выделяют универсальные электродвигатели, которые могут работать от сети переменного тока и от источников постоянного напряжения. Они используются в электроинструментах, бытовой технике, а также других маломощных устройствах. Конструкция такой электрической машины принципиально не отличатся от двигателя постоянного тока. Главное отличие – конструкция магнитной системы и обмоток ротора. Магнитная система состоит из изолированных друг от друга секций для снижения магнитных потерь. Обмотка ротора такой машины поделена на 2 части. При питании от переменного тока напряжение подается только на ее половину. Это делается в целях снижения радиопомех, улучшения условий коммутации.
К преимуществам таких машин относятся:
- Высокая скорость вращения. Универсальные электродвигатели развивают скорость до 10 000 об/мин и более.
- Питание от переменного и постоянного напряжения. Двигатели такого типа широко применяют для электроинструментов, имеющих дополнительные аккумуляторные батареи.
- Возможность регулирования скорости без использования дополнительных устройств.
Однако, такие электромашины имеют свои недостатки:
- Ограниченная мощность.
- Необходимость обслуживания коллекторного узла.
- Тяжелые условия коммутации при питании от переменного напряжения из-за наличия трансформаторной связи между обмотками.
- Электромагнитные помехи при подключении к сети переменного тока.
Каждый тип двигателя имеет свои достоинства и недостатки. Выбор электрической машины для привода любого оборудования делается исходя из условий эксплуатации, требуемой частоты вращения, экономической целесообразности, типа нагрузки и других параметров.
Источник статьи: http://drives.ru/stati/ehlektricheskie-dvigateli/
Электродвигатели
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является — электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
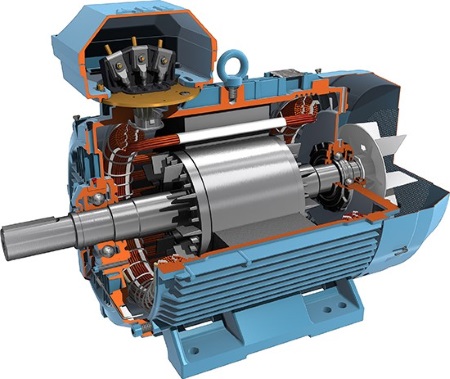
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор — неподвижная часть, ротор — вращающаяся часть.

У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя




- Подробное описание принципа работы электродвигателей разных типов:
- Принцип работы однофазного асинхронного электродвигателя
- Принцип работы трехфазного асинхронного электродвигателя
- Принцип работы синхронного электродвигателя
Классификация электродвигателей
| Вращающийся электродвигатель | ||||
|---|---|---|---|---|
| Само коммутируемый | Внешне коммутируемый | |||
| С механической коммутацией (коллекторный) | С электронной коммутацией 1 (вентильный 2, 3 ) | Асинхронный электродвигатель | Синхронный электродвигатель | |
| Переменного тока | Постоянного тока | Переменного тока 4 | Переменного тока | |
|
|
|
|
|
| Простая электроника | Выпрямители, транзисторы | Более сложная электроника | Сложная электроника (ЧП) | |
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
- АДКР — асинхронный двигатель с короткозамкнутым ротором
- АДФР — асинхронный двигатель с фазным ротором
- СДОВ — синхронный двигатель с обмоткой возбуждения
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина — вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель

Коллекторный электродвигатель постоянного тока
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина — вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].

Асинхронный электродвигатель

Cинхронный электродвигатель
Специальные электродвигатели

Серводвигатель
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
 ,
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
 ,
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин -1 [4]
Начальный пусковой момент — момент электродвигателя при пуске.
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
 ,
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].
 ,
,
Для вращательного движения
 ,
,
- где
 – угол, рад,
– угол, рад,
 – угол, рад,
– угол, рад, ,
,
- где – углавая скорость, рад/с,
 – углавая скорость, рад/с,
– углавая скорость, рад/с,Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
 ,
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (механическая), Вт
 – коэффициент полезного действия электродвигателя,
– коэффициент полезного действия электродвигателя,- При этом потери в электродвигатели обусловлены:
- электрическими потерями — в виде тепла в результате нагрева проводников с током;
- магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Частота вращения

- где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
 ,
,
- где J – момент инерции, кг∙м 2 ,
- m — масса, кг
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением
 ,
,
- где – угловое ускорение, с -2 [2]
 – угловое ускорение, с -2 [2]
– угловое ускорение, с -2 [2] ,
,
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где – постоянная времени, с
 – постоянная времени, с
– постоянная времени, сМеханическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.


| Параметр |  АДКР |  СДПМП |  СДПМВ |  СРД-ПМ |  СДОВ |
|---|---|---|---|---|---|
| Постоянство мощности во всем диапазоне скоростей | |||||
| Эффективность (КПД) во всем рабочем диапазоне |
В соответствии с выше приведенными показателями гибридный синхронный электродвигатель, а именно синхронный реактивный электродвигатель со встроенными постоянными магнитами, является наиболее подходящим для применения в качестве тягового электродвигателя в автомобилестроении (выбор проводился для концепта автомобилей BMW i3 & BMW i8). Использование реактивного момента обеспечивает высокую мощность в верхнем диапазоне скоростей. Более того такой двигатель обеспечивает очень высокую эффективность (КПД) в широком рабочем диапазоне [7]. Области применения электродвигателейЭлектродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии [6]. Источник статьи: http://engineering-solutions.ru/motorcontrol/motor/ |