Рулевой ракетный двигатель
Большая советская энциклопедия. — М.: Советская энциклопедия . 1969—1978 .
Смотреть что такое «Рулевой ракетный двигатель» в других словарях:
рулевой ракетный двигатель — raketinis vairo variklis statusas T sritis Gynyba apibrėžtis Pagalbinis raketinis variklis raketos (erdvėlaivio) padėčiai aktyviajame trajektorijos ruože valdyti. Raketa (erdvėlaivis) valdoma sudarant jėgas ir momentus, kurie keičia traukos… … Artilerijos terminų žodynas
рулевой жидкостный ракетный двигатель — рулевой ЖРД Жидкостный ракетный двигатель, предназначенный для управления вектором скорости перемещаемого аппарата на активном участке траектории движения. [ГОСТ 17655 89] Тематики двигатели ракетные жидкостные Синонимы рулевой ЖРД … Справочник технического переводчика
Ракетный двигатель (РД) — реактивный двигатель, не использующий для своей работы окружающую среду. Основной тип двигателя в космонавтике. По видам ракетного топлива, энергии и рабочему телу различают химические, ядерные, электрические, газоаккумуляторные и фотонные… … Словарь военных терминов
Стратегический ракетный комплекс 15П699 с МБР РТ-20П (8К99) — 1967 Разработка подвижного грунтового ракетного комплекса, оснащенного межконтинентальной баллистической ракетой (МБР), началась в КБ «Южное» (г. Днепропетровск) в 1964 году. Первый вариант МБР РТ 20(8К99) представлял из себя… … Военная энциклопедия
Стратегический ракетный комплекс Р-16 с ракетой 8К64 (Р-16У/8К64У) — 1961 13 мая 1959 года специальным совместным постановлением ЦК КПСС и Правительства коллективу ОКБ 586 (КБ «Южное») академика М.К. Янгеля поручили разработать межконтинентальную ракету на высококипящих компонентах топлива. Впоследствии… … Военная энциклопедия
Зенитный ракетный комплекс 9К31 «Стрела-1» («Стрела-1м») — Зенитный ракетный комплекс 9К31 «Стрела 1» («Стрела 1м») 1968 Разработка полкового самоходного зенитного ракетного комплекса «Стрела 1» началась 25 августа 1960 г. в соответствии с Постановлением СМ СССР.… … Военная энциклопедия
Точка (тактический ракетный комплекс) — У этого термина существуют и другие значения, см. Точка. Точка индекс ГРАУ 9K79 обозначение НАТО SS 21 Scarab A, по договору РСМД ОТР 21 … Википедия
Медведка (ракетный комплекс) — У этого термина существуют и другие значения, см. Медведка (значения). РПК 9 «Медведка» (по классификации НАТО SS N 29) российский малогабаритный ракетный противолодочный комплекс с противолодочной ракетой 87Р оснащённой… … Википедия
Стратегический ракетный комплекс Р-36М2 «Воевода» (15П018М) с МБР 15А18М — Стратегический ракетный комплекс Р 36М2 «Воевода» (15П018М) с МБР 15А18М 1988 Ракетный комплекс Р 36М2 «Воевода» (15П018М) четвертого поколения с многоцелевой межконтинентальной ракетой тяжелого класса 15А18М разработан в… … Военная энциклопедия
Стратегический ракетный комплекс 15П018 (Р-36М УТТХ) с ракетой 15A18 — 1979 Стратегический ракетный комплекс (РК) третьего поколения 15П018 (Р 36М УТТХ) с ракетой 15A18, оснащенной 10 блочной разделяющейся головной частью (РГЧ), создан в результате реализации программы совершенствования и повышения боевой… … Военная энциклопедия
Источник статьи: http://dic.academic.ru/dic.nsf/bse/128561/%D0%A0%D1%83%D0%BB%D0%B5%D0%B2%D0%BE%D0%B9
Управление полетом ракеты
Дальше речь пойдет именно о системе управления полетом ракеты, а точнее об органах управления, а не о системах наведения (это отдельная и интересная тема).
Как управлять полетом ракеты
Ракеты были изобретены давным давно. 200 лет до нашей эры в Китае вместе с изобретение пороха. Китайцы, конечно же, применяли ракеты как оружие, но в основном при осаде городов. Попасть куда-либо древними китайскими ракетами было сложно, разве что стрелять по большому городу. Первые ракеты никак не управлялись, можно было только задать направление и учесть ветер.
Для стабилизации (не управления) полета использовалось тот же принцип, что и для стрелы лука — оперение или стабилизаторы. Самое интересное началось тогда, когда ракеты стали управляемыми, а для этого они должны были «научится» управлять полетом. Фактически есть только два подхода: использование аэродинамических сил и газодинамики.
Аэродинамические рули
Если сделать стабилизатор подвижным, получится аэродинамический руль. Стабилизаторы похожи на рули, но с их помощью нельзя управлять полетом, просто потому, что они неподвижны. Изменения положения плоскости руля создает на нем подземную силу, которая и меняет траекторию движения. Просто и эффективно, но есть одно но.

Ракета ЗРК C-175 «Нева». Хорошо видно рулевые поверхности
Боевым зенитным ракетам, например, нужно быть верткими и быстрыми, чтобы во-первых догнать самолет, а во-вторых попасть в него, когда он начнет уклонятся от атаки. Чтобы хорошо маневрировать можно просто увеличить площадь оперения (или количество «перьев»), тогда оно будет создавать большую силу, ракета будет поворачивать быстрее. Но чем больше стабилизатор, тем больше аэродинамическое сопротивления — меньше скорость, а при этом еще и больше расход топлива, что означает меньшую дальность.
И даже для не боевых ракет, большие стабилизаторы это и хорошо и плохо одновременно.
Решетчатые рули
Такое оперение обладает преимуществом на больших углах атаки (когда ракета сильно разворачивается относительно первоначального направления движения) из-за отсутствия «срыва потока» , более компактные и прочные, их легче складывать. Управляется лучше, но сопротивление никуда не девается. Интересно, что используется такое устройство не только военными.

Советско-Российская ракета «воздух-воздух» P-77
Стоит отметить факт, что такие стабилизаторы были созданы в СССР в 50-60-х годах ХХ века в инициативном порядке. История создания решетчатых рулей наглядно показывает, как сложно преодолеть инертность мышления. По воспоминаниям разработчиков, основным аргументов противников внедрения инновационной техники было то, что «на западе таких крыльев нет».

Спускаемый аппарат Союз
Но теперь есть и «на западе» тоже. Вот, например, знаменитый Фалькон 9 от Илона Маска.

Ракета Falcon 9
Управляемый вектор тяги
А что если убрать рули вовсе? Сопротивление уменьшится, но управление потеряем. Как в таком случае маневрировать? Есть решение — управлять не «вредными» аэродинамическими поверхностями, а непосредственно тягой (струей газа из сопла). Можно поворачивать сопло, а то и всю камеру сгорания механически (что сложно и дорого, но это самый распространенный способ), можно использовать специальные жаропрочные плоскости-дефлекторы или вовсе добавить в конструкцию дополнительные двигатели.

ПРО «Thaad». У ракеты нет никаких рулей
А можно сделать сопло неподвижным и отклонять и саму струю газа, впрыскивая через форсунки в сопле жидкость или газ которые будут вызывать появление скачков уплотнения меняющих направление струи.
Все эти способы чаще используются в больших ракетах, с большим размером сопла. Например, на гражданских ракетоносителях или на межконтинентальных баллистических ракетах.

В американском Шаттле отклонялось все сопло сразу
Газодинамический пояс
Для некоторых типов ракет маневренность — критически важный показатель. Аэродинамические рули не могут одинаково хорошо работать на малой высоте и на большой. Что касается отклонения вектора тяги, то он тоже не гарантирует «быстрой реакции», та как сопло двигателя находится далеко от центра масс. Но решение есть.
Сотни маленьких сопел на ракете — двигатели поперечного управления. Или так называемых газодинамический пояс, способный очень быстро разворачивать ракету почти на месте и не созидающий аэродинамического сопротивления, пока это не станет действительно нужно. Располагаются двигатели практически в центре масс корпуса (там где он будет когда ракета выработает большую часть топлива) и включаются на конечном участке траектории, чтобы наверняка поразить цель.

Ракета для РСЗО Ольха. Импульсные двигатели газодинамического пояса
Иногда инженерам приходится объединять принципы управления находя компромиссы. Французская зенитная ракета Aster использует и аэродинамические рули и управление вектором тяги, названную pif-paf*, может маневрировать с огромной перегрузкой до 60g и уничтожать не только самолеты и вертолеты, где маневренность ограничивается пилотами (человек может пережить перегрузку в 9 g и то кратковременную) но и своих родственников — ракеты.

Ракета Aster-30. Черная часть — разгонная первая ступень
*PIF (Pilotage Intertiel en Force) + PAF (Pilotage Aeronautique en Force) — инерционное управление+аэродинамическое управление.
Источник статьи: http://interesnye-istorii.in.ua/rocket-flight-control/
Система управления ракеты 8К14
Система управления (СУ) предназначена для подготовки к пуску,осуществления пуска и управления полётом ракеты. В комплект системы управления входят: бортовая аппаратура СУ с электрооборудованием (автономная система управления); испытательно-пусковое оборудование технической позиции; испытательно-пусковое оборудование стартовой позиции.
Автономная система управления предназначена для управления полётом ракеты на активном участке траектории и состоит из:
- системы стабилизации движения,
- прибора управления дальностью,
- коммутационных устройств,
- электрооборудования.
Система стабилизации движения ракеты
Система стабилизации движения ракеты выполняет следующие функции:
- стабилизацию углового положения ракеты в пространстве относительно трёх взаимно перпендикулярных осей:
- оси рыскания – поперечной оси, расположенной в плоскости стабилизаторов I и III;
- оси тангажа – поперечной оси, расположенной в плоскости стабилизаторов II и IV;
оси вращения – продольной оси ракеты;
Система стабилизации воздействует на исполнительные органы управления ракеты (рулевые машины) по трем каналам:
- по каналу, обеспечивающему стабилизацию движения ракеты в плоскости стрельбы (по углу тангажа);
- по каналу, обеспечивающему стабилизацию бокового движения (по углу рыскания и боковому отклонению);
- по каналу, обеспечивающему стабилизацию движения ракеты вокруг продольной оси (по углу вращения).
Все приборы, входящие в систему стабилизации движения ракеты, можно разделить на четыре группы:
- датчики (в качестве датчиков используются гироприборы 1СБ9 и 1СБ10, которые служат для выдачи командных сигналов, пропорциональных отклонениям ракеты от заданного положения и боковой составляющей ускорения центра масс ракеты);
- счетно-решающий прибор (счетно-решающий прибор автомата стабилизации 1СБ13 служит для преобразования, суммирования и усиления командных сигналов, снимаемых с датчиков);
- исполнительные органы (рулевые машины 1СБ14 приводят во вращение газоструйные рули ракеты);
- потенциометры обратной связи (предназначены для улучшения стабильности работы и обеспечения малой зависимости статических коэффициентов усиления автомата стабилизации от возмущений рулевая машина и счётно-решающий прибор охватываются внешней отрицательной обратной связью. Сигналы обратной связи снимаются с потенциометров обратной связи 9Б312)
Гирогоризонт 1СБ9 вырабатывает текущие значения программного угла поворота ракеты по заданной функции времени, а так же командные сигналы, пропорциональные угловым отклонениям продольной оси ракеты в плоскости наведения от задаваемого программой направления (отклонения по углу тангажа). Кроме того, гироприбор 1СБ9 вырабатывает команду в систему АПР в случае, если отклонение от заданной траектории по углу тангажа превышает 10°.
Гировертикант и гироскопический интегратор боковых ускорений 1СБ10 представляет собой сочетание двух приборов и предназначен для выработки командных сигналов в виде напряжений, пропорциональных: угловому отклонению продольной оси ракеты от плоскости стрельбы — углу рыскания; повороту ракеты вокруг продольной оси — углу вращения; проекции скорости ракеты в направлении, перпендикулярном плоскости стрельбы. Кроме того, он вырабатывает команду для системы АПР в тех случаях, когда угол рыскания ракеты или угол её вращения достигает 10°±1°.
Счетно-решающий прибор автомата стабилизации 1СБ13 выполняет следующие функции:
- Преобразование командных сигналов, поступающих с датчиков гироприборов, по определённому математическому закону в соответствии с требованиями динамической устойчивости движения ракеты на активном участке траектории и обеспечения заданной кучности стрельбы.
- Суммирование в нужных сочетаниях преобразованных сигналов по каналам тангажа, рыскания, вращения, боковой стабилизации и внешней отрицательной обратной связи.
- Усиление мощности командных сигналов, поступающих на управляющие обмотки реле рулевых машин.
- Управление работой рулевых машин.
Рулевые машины 1СБ14 являются силовыми исполнительными органами автомата стабилизации ракеты 8К14 и предназначены для поворота рулей в соответствии с поступающим на них командным током.
Гироскопический интегратор продольных ускорений 1СБ12 предназначается для использования в бортовой системе управления ракеты в целях обеспечения её полёта на заданную дальность путём автоматической подачи сигналов для выключения двигателя при приобретении ракетой скорости, необходимой для свободного полёта из точки выключения двигателя до цели. Измерение скорости полёта ракеты в приборе 1СБ12 основано на принципе интегрирования ускорения движения.
Гироплата 1СБ11 является опорной плоскостью для установки приборов 1СБ9, 1СБ10 и 1СБ12. На верхней плоскости платы имеются установочные площадки под гироприборы и базовые пальцы, предназначенные для фиксации приборов на плате. Прибор 1СБ12 устанавливается так, чтобы гирограма составляла с продольной осью ракеты угол 5°50′ — этим достигается уменьшение влияния продольного ветра на дальность полёта ракеты.
Прибор управления дальностью.
В качестве прибора управления дальностью используется гироскопический интегратор продольных ускорений 1СБ12, который вырабатывает команду на выключение двигателя при достижении ракетой скорости полёта, обеспечивающей заданную дальность стрельбы.
Коммутационная аппаратура СУ
Временной механизм 1СБ15 представляет собой электромеханический прибор, предназначенный для коммутации электрических цепей системы управления по заданной программе времени.
Коммутационная коробка 1СБ16 предназначена для осуществления коммутации межприборных цепей и необходимых переключений схемы, связанных с подготовкой ракеты к старту и работой бортовых приборов, а также электроавтоматики двигательной установки на активном участке полёта ракеты.
Бортовое отключающее устройство С-229 предназначено для отключения питания приборов системы управления от шины бортовой батареи +Б в случае прохождения команды на аварийное выключение двигателя.
Бортовая кабельная сеть системы управления 1СБ20 ракеты 8К14 предназначена для:
- соединения отдельных бортовых приборов и элементов электроавтоматики двигательной установки между собой;
- связи системы управления с системой аварийного подрыва ракеты и аппаратурой головной части;
- связи бортового электрооборудования с испытательно-пусковой аппаратурой.
Бортовая кабельная сеть ракеты 8К14 по своему назначению разделена на:
- комплект основных боевых кабелей 1СБ20
- комплект боевых головных кабелей 1СБ48 ( В случае, если ракета используется не с боевой головной частью, а с телеметрической, то вместо кабелей комплекта 1СБ48 применяются кабели комплекта 1СБ49).
- Комплект сменных кабелей 1СБ21 предназначен для соединения ракеты с испытательно-пусковой аппаратурой.
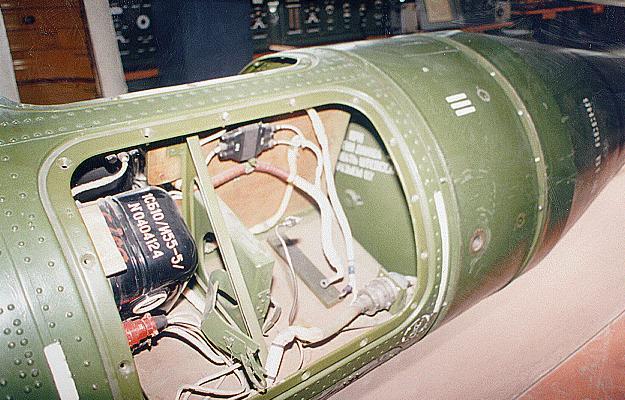
Бортовое электрооборудование состоит из первичного химического источника питания постоянного тока и вторичных источников питания трехфазного переменного тока частоты 500 и 1000Гц и обеспечивает электропитанием бортовые приборы системы управления. Бортовые приборы, электрооборудование и коммутационная аппаратура в основном размещены в приборном отсеке и частично в головной и хвостовой частях ракеты. Кабели, соединяющие приборный отсек с хвостовой частью, проходят с наружной стороны баков ракеты под обтекателями. Бортовая аппаратура системы управления ракеты соединяется с испытательно пусковой аппаратурой через три 86-контактных разъема типа С-589 (Ш37, Ш38 и Ш39)
Ампульная батарея системы управления 1СБ18 (1СБ18М) является первичным источником питания на борту ракеты и представляет собой химический источник тока одноразового действия ампульного типа. Электрохимический источник тока приводится в действие переливом электролита, находящегося в ампулах, в элементный моноблок под действием сжатого воздуха при давлении 10±2атм. (для 1СБ18М — 11±1атм.). В результате электрохимической реакции батарея приводится в действие и через 7с после подачи импульса сжатого воздуха может быть нагружена номинальным током. Залитый электролитом источник тока при подключении нагрузки работоспособен в течение 100с при разрядном токе 110А и напряжении в конце разряда не менее 24,8В. Для нормальной работы батареи 1СБ18 температура окружающего воздуха должна быть не ниже +25°С, для батареи 1СБ18М — не ниже -15°С. В связи с этим в корпусе батареи размещён электронагреватель с терморегулятором.
Комплект преобразователя 1СБ47 с прецизионным регулятором частоты ПРЧ-30Б используется на борту ракеты в качестве источника переменного тока. Он предназначен для преобразования постоянного тока напряжением 27В в трехфазный переменный ток напряжением 40В частотой 500 и 1000Гц и для получения токовых импульсов частотой 50 и 12,5Гц. Регулятор частоты, работающий в комплекте с преобразователем, служит для поддержания постоянной частоты трехфазного тока и частоты токовых импульсов в заданных пределах при колебаниях напряжения питающей сети и изменении нагрузки. От генератора 500Гц преобразователя 1СБ47 питаются гиромоторы автомата дальности, гировертиканта и гирогоризонта. От генератора 1000Гц питаются гиромоторы бокового стабилизатора прибора 1СБ10 и счетно-решающий прибор автомата стабилизации 1СБ13. Пульсирующее напряжение преобразователя частотой 50 Гц используется для питания шаговых моторов программного механизма гирогоризонта и бортового временного механизма, а также для питания шагового электромагнита автомата дальности при установке дальности. Пульсирующее напряжение 12,5Гц предназначено для питания шагового электромагнита автомата дальности в полёте.
В состав электроавтоматики пневмогидравлической схемы входят следующие элементы:
- электропневмоклапан (бортовой) ЭПК;
- сигнализаторы давления СД1, СД2, СД3;
- 28 пиропатронов : ВП, АП, ПК, ППШ, ОП, ПС.
В электроавтоматике ДУ применены пиропатроны типа ДП-1.
Источник статьи: http://missilery.info/missile/8k14/su