Создать квадрокоптер как платформу для летающего робота я планирую уже очень давно. Первые расчеты и заказ деталей я сделал год еще назад. Однако, делать «просто коптер» чтобы полетать, управляя с пультом или даже в FPV режиме конечной задачей не является. Поэтому коптер должен быть максимально гибким и как можно менее дорогим. По отдельности все детали для коптера есть, но их сопряжение — дело простое только в теории. Нужно быть и программистом и инженером и моделистом — вертолетчиком. Поэтому процесс движется довольно небыстро. А летать хочется 🙂 Ничто так не расхолаживает и не демотивирует как отсутствие видимых результатов, особенно когда прогресс-то вроде есть, но не наглядный. Да и экспериментировать сразу на большом квадракоптере дорого и опасно. Поэтому я решил собрать для экспериментов миникоптер. Как всегда — задача сделать недорого, просто и гибко. Мой результат — готовый коптер за 1 день (на сборку и запуск) и $120 (стоимость квадрокоптера включая доставку). А с аппаратурой — $145.
Кому как, а для меня основной преградой в коптеростроении всегда была дороговизна проверенных наборов деталей (kit), которые можно купить в одном месте и поэкспериментировать. Ведь собрав коптер, просто так летать надоест очень быстро, если, конечно, вы не авиамоделист, для которого это лишь еще одна забавная моделька. Самое интересное — добавить коптеру немного (или много, зависит от умений и изобретательности) самостоятельности. Но пока поднимешь коптер в воздух потратишь столько сил, что на самое интересное запал уже начинает угасать. Да и пока отладишь программу управления — разоришься, ведь каждая ошибка — это почти наверняка падение, а самое дешевое падение — это сломанные пропеллеры. Сейчас покажу, как это преодолеть.
На самом деле основной бюджет коптера еще меньше, всего около $100 включая доставку. Итак, обязательные запчасти:
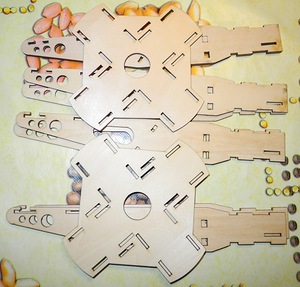
Рама с моторами 445 мм
$28,95
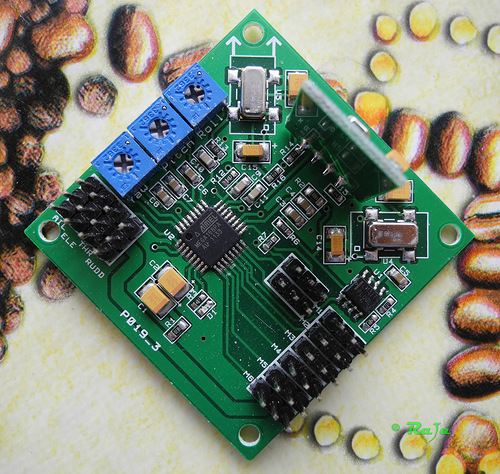
Плата управления (аналог KKmulticopter, но от HK)
$14,95
ESC (регуляторы хода)
$5,96 х 4
Пропеллеры прямого и обратного вращения
$1,34 + $1,94
Резиновые кольца для крепления пропеллеров
$1,4
Пропсейверы Prop Saver w/ Band 4mm (10pcs)
$3,99
Аккумулятор на 1300мАч
$5,96
Вот и весь джентльменский набор.
Но нам понадобится и кое-что дополнительно. Возможно, у вас что-то из этого имеется, поэтому заказывайте то, чего не хватает:
AVR ISP Программатор для платы управления (подойдет FTBB, USBASP, Arduino… любой)
$4,75
Провода от ресивера к плате управления
$4
Servo extension для подключения ESC — свои провода не достают, берите любые или спаяйте сами — там три проводка
Радиоаппаратура — любая с 4 и более каналами
от $22,99
Разъемы XT60 к батарее
$2.16
Силовой провод или аналогичный медный красного и черного цветов (+ -)
$1,29
Радиоаппаратура у меня Turnigy 9x, которую я доработал для использования с LiIon аккумулятором и впаял разъем для обновления прошивки аппаратуры (я пользуюсь прошивкой er9x), но ее сейчас очень долго ждать из-за ее популярности, поэтому и не стал ее рекомендовать. Вообще, берите любую, какая есть в наличии и которая вам нравится с количеством каналов от 4. У меня Mode2 (ручка газа слева), но это не принципиально. Если возьмете 6-канальную Hobby King 2.4Ghz 6Ch Tx & Rx V2, не забудьте к ней шнурок для программирования, т.к. на ней самой никаких настроек не сделать, даже реверсировать каналы. Настраивается только с ПК.
Я покупал на HobbyKing только потому, что абсолютно все, что нам понадобится можно заказать там, но вы можете брать на rctimer.com или в любом другом месте. Если будете брать на HK, заказывайте сразу внизу нужные combo детали — так будет дешевле, чем набирать их по отдельности. ЗИП: Нам понадобятся еще винтики М2х10 или М3х10 (их проще достать в магазине, но придется чуть-чуть рассверлить отверстия в креплении моторов, это несложно). Аккумуляторов берите по возможности хотя бы пару. Если нет зарядки для LiPo аккумуляторов, тоже берите, это разовое вложение, пригодится. Пропеллеров берите побольше. Не смотрите, что их по 5 штук в пакете. Я в первый день сломал 4 штуки, пока настраивал и обнаружил глюк в прошивке. 🙂 Это расходный материал, особенно в тесной комнате как у меня. Запасные моторы тоже, наверное не помешают, но это позднее, сразу вы их вряд ли сломаете. Понадобится также паяльник, немного припоя и флюса, термоусадочная трубка диаметром 2 и 5 мм или изолента, резинка для денег или от трусов для крепления аккумулятора 🙂 Как только определились что у нас есть, а что заказываем и в каком количестве, заказываем и спокойно ждем недельки три (ну это как повезет с почтой).
Собираем наш квадрик
Боковинки каждого луча склеиваем с помощью ПВА-М или суперклея (ПВА-М дает прочные эластичные швы, но собирать раму лучше вечерком, чтобы до утра оставить клей высохнуть как следует). Собираем все лучи и приклеиваем к нижней центральной пластине. Верхнюю пока отложите в сторону. Ножки лучей склеиваются из двух одинаковых половинок. Поскольку в луче всего 5 деталей (2 стенки и три распорки :), думаю, что сложности в сборке не составит. Откладываем раму сохнуть до утра. А с утра достаем паяльник, термоусадку, провода и садимся паять. Сначала продеваем провода всех 4х ESC в лучи вот таким макаром:
Затем берем толстый провод, отрезаем по 2 куска красного и черного цветов длиной сантиметров по 5-7. Зачищаем с концов по 5 мм и в середине примерно 5-7 мм. Куски спаиваем зачищенными серединами крест-накрест. Получится два креста — черного и красного цветов. Концы пока просто залудить. Затем к красному перекрестию припаиваем красные концы от всех четырех ESC, не забыв надеть кусочки термоусадочной трубки по 1.5-2 см. То же самое проделываем с черной крестовиной. Размещаем все это в центре квадрокоптера. Отрезаем еще по 1 куску толстого провода и припаиваем их к перекрестьям, концы выводим в отверстие в днище коптера, а место спайки изолируем:
Проверьте все внимательно, чтобы не было непропаев и коротких замыканий. Припоя не жалейте, токи тут очень серьезные текут, поэтому площадь контакта нужна побольше. Если все в порядке, можно смазать ПВА-М верхнюю крестовину коптера и приклеить ее, спрятав таким образом все силовые провода внутри. На хвостик из просунутых в отверстие днища проводов надеваем термоусадку и припаиваем коннектор XT60 в соответствии с обозначенной на нем полярностью (красный провод к +). Теперь крепим моторы к раме парой винтов М3х10, подложив с обратной стороны шайбу. Просовывем в отверстие в раме провода от мотора, припаиваем их к ESC. Перед пайкой наденьте термоусадочные кембрики, но пока не усаживайте их, после проверки может понадобиться сменить направление вращения мотора, для этого нужно поменять местами любые два провода. Выглядит в готовом виде это примерно так:
Ну вот, теперь можно проверить и настроить ESC и моторы. Не надевая пропеллеры, подключаем к ресиверу в 3й канал — это Throttle в стандартной 4х канальной схеме (или серво-тестеру, если имеется), затем включаем передатчик (предварительно нужно связать их- bind, эта операция описана в инструкции). Подключаем аккумулятор к коннектору XT60. После писка от ESC плавно даем газ и проверяем, что мотор с ESC в порядке. Повторяем процедуру для остальных моторов. Я бы заодно порекомендовал настроить тип батареи и скалибровать газ, но это можно и потом. Проверяя моторы, обратите внимание на направление вращения. Нам нужно, чтобы два мотора напротив друг друга вращались в одну сторону, а соседние — в разные:
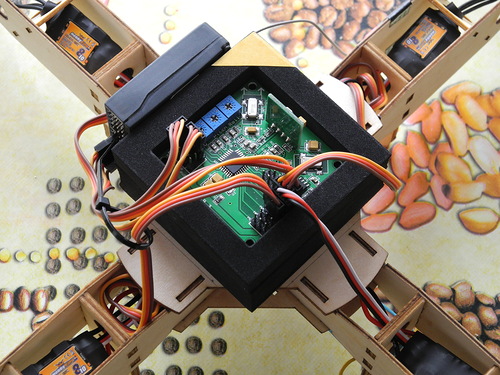
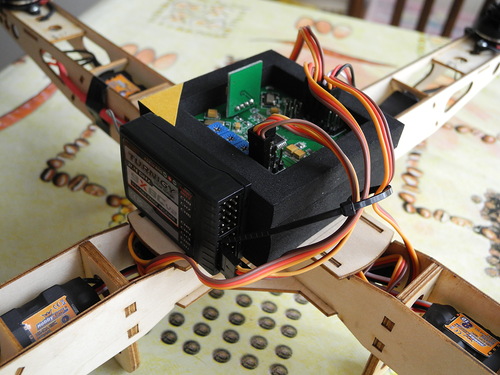
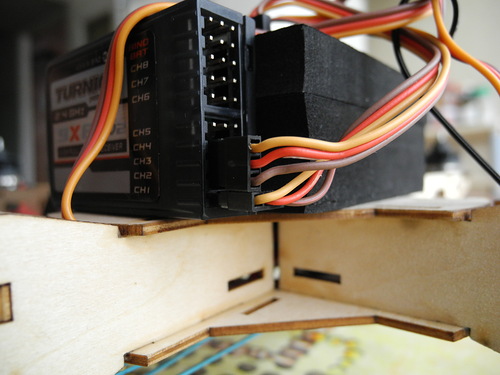
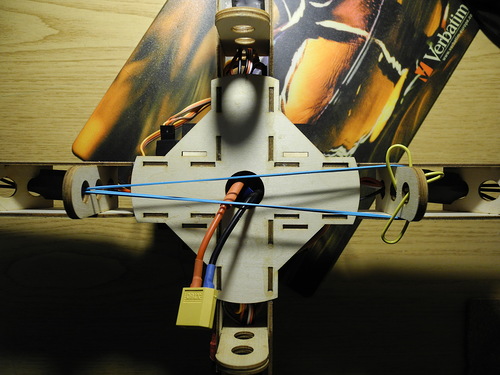
Поменять направление вращения мотора, напоминаю, можно поменяв местами любые 2 из трех проводов, которые идут к ESC. Можно сразу пронумеровать моторы по схеме соответственно направлению вращения и подписать карандашом на лучах. Все вращается правильно и реагирует на ручку газа передатчика правильно? Замечательно, переходим к плате управления. Она поставляется в мягком корпусе из пеноматериала. аккуратно ее извлекаем, переворачиваем и вставляем обратно, а мягкий корпус на двусторонний скотч или клей крепим на раму так, как указано на картинке выше, чтобы стрелка смотрела между лучами, на которых установленым моторы 1 и 2. Сбоку к нему клеим на двусторонний скотч ресивер радиоаппаратуры (антенну крепим к одному из лучей):
Я наклеил стрелку на корпус, чтобы было легче ориентироваться на земле где у коптера перед. Теперь подключаем мозги — скорее всего 2-3 из 4 ESC не достанут до платы управления, тут то и пригодятся servo extension кабели. Но их можно сделать самим. Нужна 3пиновая вилка из обычный PLS гребенки с шагом 2.54 ммм и половинка кабеля для соединения ресивера и платы управления (нам нужен Female коннектор). Подключаем моторы соответственно нумерации в разъемы M1-М4
Сигнальный провод к центру платы, землю к краю (на предыдущей фото все видно). Теперь подключаем ресивер. По умолчанию 4-х канальная настройка такая: 1 — Aileron (элероны, ROLL) 2 — Elevator (тангаж, PITCH) 3 — Throttle (газ) 4 — Rudder (руль направления, рыскание, YAW) Вот и подключаем по порядку каналы к плате, на ней подписано соответственно AIL, ELE, THR, RUDD. Только не 4 проводами, а проще: первый подключаем как положено — черный провод (земля) к краю платы, сигнальный внутрь, а остальные три канала подключаем одним проводом, нас интересует только сигнальный провод:
Все, осталось прикрепить батарею и коптер собран. Тут и настал черед резинки 🙂
Батарею при взвешивании просто положил сверху.
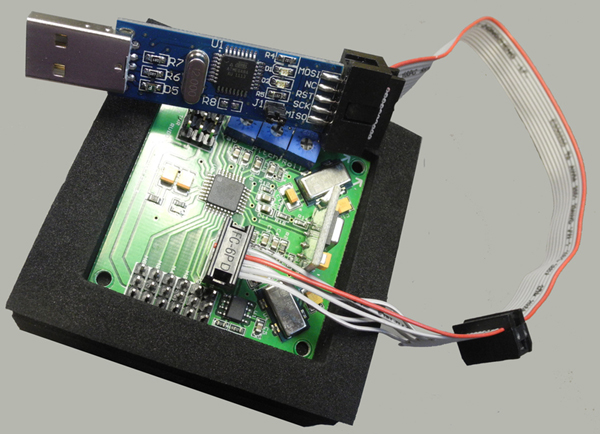
Осталось прошить плату управления и настроить коптер. Для прошивки используем AVR ISP программатор. Подключение такое:
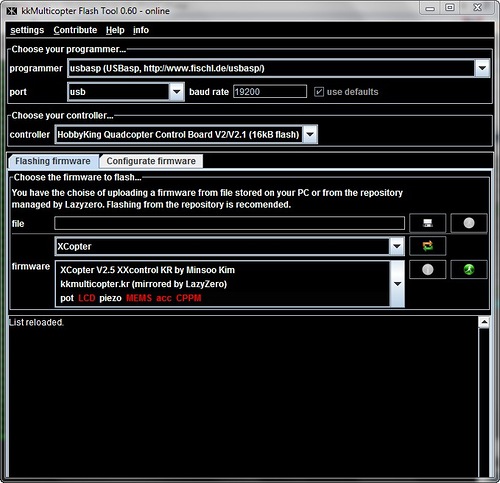
Т.к. плата является клоном Kaptein Kuk quadrokopter, можно воспользоваться их софтинкой (KKmulticopter Flash) для прошивки. У меня стабильно заработала прошивка XXcontrol_KR_XCopter v2.5. Ее можно прошить с помощью avrdude: avrdude -c usbasp -p m168p -U flash:w:XXcontrol_KR_XCopter_v2_5.hex:a или выбрать в программульке для прошивки, она скачает сама.
v4.7 от Kaptein Kuk у меня заработала некорректно, поэтому не советую ее.
Отключаем от программатора, выполняем настройку по инструкции (пункты 1, 2, 4 и 8, остальное по желанию). Все, полетели 🙂 Взлетать советую медленно и очень осторожно. Сначала поставьте коптер стрелкой от себя, нужно попробовать приподнять коптер газом, если наклоняется или вращается, триммируем его, чтобы он взлетал без перекоса (попробуйте покачать аккуратно стиками элеронов и тангажа, буквально касаясь их, пока он еще на земле, чтобы убедиться, что все каналы работают правильно, если нет, инвертируйте нужные, у меня это был канал Elevator). Затем если он покачивается стиками правильно, чуть-чуть добавьте газа, чтобы взлетел на пару сантиметров, и опускайте обратно. Ну и дальше учимся летать 🙂 (Я пока определил что к чему, сломал 2 пропеллера об стену — глюк прошивки v4.7, а потом еще в процессе настройки коэффициентов усиления гироскопов сломал еще пару — коптер раскачивался и задел диван, дома тесно, поэтому дома больше не летаю). Если не уверены или страшно — наденьте защитные очки и оденьтесь, пропеллеры бьют ощутимо, мне не попадало по рукам, но они острые и вращаются очень быстро! Как освоите эту платформу, можно ставить свой контроллер или писать свою прошивку, добавлять акселерометры, барометр, компас, сонар, GPS, телеметрию, LPS лазер и делать из платформы робота. Но сначала получаем удовольствие, от винта, мы взлетели! Удачных вам полетов!
Источник статьи: http://volamar.ru/subject/03kolibri/view_post.php?cat=1&id=9
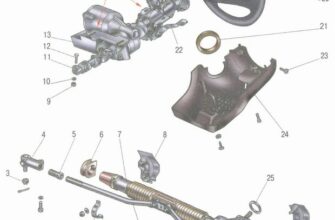
Рулевая машинка принцип работы
авиамоделизм — мир увлеченных
Главная > Статьи > Аппаратура радиоуправления > Устройство сервоприводов
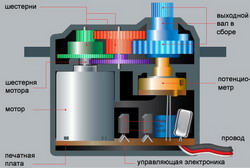
Что в корпусе тебе моем? Изучаем начинку сервоприводов и надписи на коробках
Все мы бывали в подобной ситуации, стояли перед прилавком местного магазинчика товаров для хобби, смотрели на море запчастей и думали, что же выбрать. Обычное дело! Часто выбрать правильную деталь сложнее, чем определиться с цветом вашего нового автомобиля ;-).
Как и остальные комплектующие типа двигателей, лопастей, топлива и радиоаппаратуры, сервоприводы представлены в огромном ассортименте. К счастью есть мы, источники информации и автор-переводчик и сейчас мы поведаем о том, как это море сервоприводов классифицируется, называется, какие конструкции бывают и для чего их придумали. Надеемся это поможет вам разобраться в ваших требованиях и быстро определиться с выбором. Справедливости ради надо заметить, что рассказ пойдет о обычных авиационных сервоприводах.
Начнем с хвоста
Все сервоприводы для радиоуправляемых моделей используют три провода для работы. Положительный провод для питания, обычно 4.8В или 6В, отрицательный провод и сигнальный провод. Управляющий сигнал передает информацию о требуемом положении выходного вала. Вал связан с потенциометром, который определяет его положение. Контроллер по сопротивлению потенциометра и значению управляющего сигнала определяет, в какую сторону требуется вращать мотор, чтобы получить нужное положение выходного вала. Чем выше напряжение питания сервопривода, тем быстрее он работает и больший момент развивает.
Управляющий сигнал представляет собой импульсы переменной ширины. Импульсы повторяются с постоянной частотой, которая измеряется в герцах. Большая часть приемников генерирует импульсы с частотой 50Гц. Это означает, что они передают команды о требуемом положении сервопривода 50 раз в секунду. Положение сервопривода определяется шириной импульса. Для типичного сервопривода, используемого в радиоуправляемых моделях, длительность импульса в 1520 мкс означает, что сервопривод должен занять среднее положение. Увеличение или уменьшение длины импульса заставит сервопривод повернуться по часовой или против часовой стрелки соответственно.
Гироскопы используют более высокую частоту импульсов: 250Гц и 333Гц, что позволяет гироскопам чаще передавать команды сервоприводам. Гироскопы GY601/611 используют нестандартную ширину импульса 760мкс. Среднее положение при этом соответствует 760мкс, аналогично 1520мкс в стандартном сервоприводе.
Размеры бывают микро, мини, стандартный и гигант(1/4). В пределах каждого класса размеры могут немного меняться, но в целом указанные группы покрывают 95% встречающихся размеров.
Средние размеры сервоприводов для справки:
Микро: 24mm x 12mm x 24mm
Мини: 30mm x 15mm x 35 mm
Стандарт: 40mm x 20mm x 37mm
Скорость сервоприводов измеряется временем поворота качалки сервопривода на угол 60 градусов при напряжении питания 4.8В и 6В. Например, сервопривод с параметром 0.22с/60° при 4.8В поворачивает вал на 60 градусов за 0.22с при напряжении питания 4.8В. Это не так быстро, как может показаться. Наиболее быстрые сервоприводы имеют время перемещения от 0.06 до 0.09с.
Момент сервопривода измеряется по весу груза в кг, который сервопривод может удерживать неподвижно на качалке с плечом 1 см. Указывают две цифры, для напряжения питания 4.8В и 6В. Например если указано, что сервопривод развивает 10кг/см, значит, что на качалке длиной 1см сервопривод может развить усилие 10 кг, прежде чем остановится. Для качалки в 2см такой сервопривод сможет развить усилие 5кг, а на 5мм целых 20кг.
Пластиковые, карбонитовые или металлические шестерни?
Как видно из названия, сервоприводы бывают с пластиковыми, карбонитовыми и полностью, либо частично металлическими шестернями или только с металлическим выходным валом. У всех есть свои плюсы и минусы, в зависимости от того где вы будете их использовать.
Пластиковые шестерни относительно непрочные, зачастую ломаются при падении модели, но ремкомплекты на них недороги, а сами шестерни практически не изнашиваются. Карбонитовые во многом аналогичны пластиковым, немного прочнее последних и чуть более подвержены износу. Металлические шестерни намного прочнее, хорошо противостоят падениям, однако имеют самый дорогой ремкомплект и сильно подвержены износу. Со временем в металлических шестернях появляется люфт и, по-хорошему, их надо полностью менять каждый сезон.
Обычный мотор, мотор без сердечника или бесколлекторный мотор?
Обычный мотор это мотор постоянного тока, который имеет наборный железный сердечник, разделенный на секции, на которые наложены витки обмотки. Сердечник, обмотки и коллектор образуют якорь. По бокам якоря расположены постоянные магниты. Сердечник бывает с 3-мя и 5-ю полюсами. Пять полюсов дают более высокий момент и плавность хода. Тяжелый якорь мешает мотору быстро набирать обороты и быстро останавливаться, а во время вращения якорь совершает колебания каждый раз как очередная секция сердечника проходит мимо магнита. Все это делает работу сервопривода с таким мотором дерганой и неточной.
Моторы без сердечника, напротив, имеют единственный неподвижный магнит в центре и вращающуюся обмотку, которая оформлена в виде цилиндра или стакана и окружает магнит. Такая конструкция легче, не имеет секций и в результате более динамична и работает без рывков. Естественно, моторы без сердечника дороже, но дают более высокую точность, момент и скорость по сравнению со стандартными моторами.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно и на данный момент выпускаются только компанией Футаба. Преимущества те же что и у остальных бесколлекторных моторов: нет щеток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Недостаток — цена выше на 50-70%.
Цифровые или аналоговые?
Что бы определиться какие лучше, давайте рассмотрим принцип работы тех и других и выбор станет очевиден. Но для начала отметим, что цифровые и аналоговые сервоприводы механически не отличаются друг от друга. У них те же корпуса, моторы, шестеренки и даже потенциометры. Все дело в способе управления мотором!
Работа аналогового сервопривода
Сервоприводы управляют мотором с помощью импульсов напряжения, подаваемых на мотор. Напряжение при этом постоянно и равно напряжению питания приемника (4.8 — 6В). Частота импульсов стандартна — 50Гц. Чем длиннее импульс, тем быстрее вращается мотор и больший момент развивает. Точно так же работает большинство регуляторов моторов. Подобное поведение можно получит включая и выключая бытовой вентилятор. Чем реже включаем тем медленнее вращается, а чем чаще и дольше держим включение — тем быстрее.
Возвращаемся к сервоприводу. В покое на мотор не подается напряжение, а если лишь слегка отклонить стик передатчика, то на мотор пойдет короткий импульс напряжения. Чем больше перемещение стика тем шире импульс питания для мотора, и тем быстрее сервопривод двигается в нужное положение. Важно, что на малых перемещениях на мотор подаются короткие импульсы малой мощности, т.е. если стик или внешняя сила медленно сдвигает вал с места, сначала на мотор подаются слабые сигналы и чем сильнее отклоняется стик или дальше смещается вал от точки удержания, тем более мощные импульсы питания посылаются на мотор.
Как вы понимаете, короткие слабые импульсы не могут заставить мотор вращаться быстро и развивать высокий момент. В этом и состоит проблема всех аналоговых сервоприводов: они медленно и слабо реагируют на малые команды управления или когда внешняя сила сдвигает их с места. Зона низкой скорости и момента называется мертвая зона (deadband).
Впрочем, все это не так страшно пока вертолетом управляет обычный человек, но когда за дело берется гироскоп, система стабилизации или топ-пилот с реакцией мангуста, аналоговые сервоприводы становятся проблемой.
Работа цифрового сервопривода
Спасение в цифровых сервоприводах! Как говорилось ранее, аналоговые и цифровые сервоприводы сделаны из одних деталей и даже трехжильный провод для управления тот же. Вся разница в том, как управляющие импульсы посылаются на мотор.
Миниатюрный микроконтроллер анализирует сигнал поступающий с приемника и преобразует его в высокочастотные импульсы управления мотором. В отличии от аналоговых сервоприводов где мотор получает управляющие импульсы 50 раз в секунду, мотор цифрового сервопривода получает таких сигналов более 300 в секунду. Само собой, импульсы будут короче, но при таком их количестве сервопривод и ускоряется быстрее и создает постоянный высокий момент. Вы наверняка обращали внимание на «пение» цифровых сервоприводов под нагрузкой — это слышны короткие частые управляющие импульсы, посылаемые на мотор.
В результате мы получаем сервопривод который имеет намного меньшую мертвую зону, быстрый отклик, быстрый и плавный набор скорости и отличное удержание.
Все здорово, но все эти ускорения и моменты имеют один маленький недостаток — энергопотребление! Да-да, цифровые сервоприводы охотно потребляют энергию бортового аккумулятора, их достоинства надо кормить. Вы можете совершенно справедливо заметить, что при нынешнем развитии аккумуляторных технологий дополнительное энергопотребление не такая уж проблема. Это так, но убедитесь, что в случае использования встроенного в регулятор линейного BEC, его мощности достаточно для питания постоянно отрабатывающих цифровых сервоприводов! Оптимально в таких случаях использовать внешний или встроенный импульсный BEC.
И так, цифровые сервоприводы намного лучше аналоговых. Конечно, вы по-прежнему можете летать на аналоговых, но однажды попробовав цифровые, вряд ли вернетесь назад. И под конец сравнения обратим внимание еще на один момент: в спецификациях аналоговых сервоприводов зачастую указаны цифры скорости и момента выше чем у некоторых цифровых, но вы же помните что аналоговые приводы имеют меньшую скорость и момент на коротких и малых перемещениях. Красивые цифры даны для максимального отклонения стика, когда сервопривод работает на полную мощность. Даже с меньшими значениями характеристик цифровые сервоприводы все равно будут работать лучше на малых перемещениях, когда скорость и момент особенно важны.
Подшипники качения или подшипники скольжения?
Выходной вал проходит через корпус сервопривода и в месте выхода вал поддерживается либо шарикоподшипником, либо пластиковой втулкой.
Как и прочие вращающиеся механизмы, сервоприводы работают более плавно и точно если в них используются подшипники качения. Такие сервоприводы менее подвержены износу чем сервоприводы с втулкой, поскольку втулка неизбежно изнашивается и появляется люфт между корпусом и выходным валом. Желательно везде использовать сервоприводы с подшипниками качения, хотя они и несколько дороже.
Скорость или момент?
В большинстве случаев предпочтительны более мощные и быстрые сервоприводы. Однако скоростные сервоприводы хороши когда пилот успевает реагировать на резкое поведение вертолета или когда высокая скорость требуется для правильной работы модели.
Многие пилоты не осознают, что сервоприводы могут быть слишком быстрыми для их уровня подготовки и рефлексов и могут сделать вертолет сложным в управлении. Быстрые сервоприводы необходимы для управления хвостом вертолета, тогда как для управления циклическим и коллективным шагом требуется высокий момент, который позволяет сервоприводу держать положение и быстро возвращаться в центр, что особенно важно при выполнении 3D маневров.
Немного о тюнинге 😉
Рекомендуется смазать место выхода вала из корпуса сервопривода густой смазкой, а место выхода провода герметиком, чтобы защитить начинку от попадания воды и топлива. Впрочем, это дело вкуса.
Существует ли такой? Зависти от того, кого вы спросите и от того, где сервопривод применяется. Отличный сервопривод должен работать так быстро как вам надо, давать большой момент, хорошо держать положение и при этом быть дешевым. Похоже, такого еще не изобрели. Каждый производитель ищет баланс характеристик и рекламирует свой товар, поэтому выбирайте мудро. Во многом выбор сервопривода зависит от опыта применения и ваших личных потребностей. В конечном итоге не столь важны цифры на коробке и хорошая цена, сколько важно, что бы сервопривод делал свою работу и позволял вам летать!
Зачастую английские и американские производители и интернет-магазины используют исключительно английские единицы измерения. Для нас привычнее единицы СИ. Для перевода можно воспользоваться данными ниже:
Для перевода момента из унций на дюйм (oz/in) в килограммы на сантиметр (kg/cm), разделите исходное значение на 13.89