Схема поворота четырехосного автомобиля
Главная Конструктивные решения многоосных автомобилей
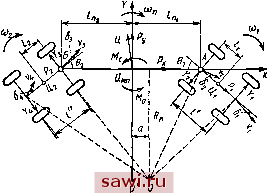
Рис. 68. Расчетная схема поворота сочлененного автомобиля
особенности свойств сочлененных и многоопорных многоосных автомобилей.
Сочлененные автомобили. Используя допущения и методику анализа, принятые в подразд. 31, составим расчетную схему и уравнения криволинейного движения сочлененного автомобиля.
Для получения наиболее общих зависимостей в качестве исходной схемы
примем схему поворота сочлененного автомобиля полуприцепного типа (рис. 68).
Как видно, схема состоит из двух двухосных секций, соединенных грузовой платформой с управляемыми шарнирами А и Б. На схеме положение шарниров совпадает с центрами осей, что принято для упрощения расчетов геометрических связей. Их положение определяется координатами /пь /п2, U и /г, показывающими расстояния от центра симметрии платформы и звеньев до шарниров. Подвижную систему координат Х и У свяжем с платформой.
Как и в подразд. 31, все внешние силы, действующие на автомобиль с учетом сил инерции, будем считать заданными и заменим их обобщенными силами Рх я Ру и моментом приведения ЛГо. Неизвестными силами будем считать силы тяги и Рг и боковые силы на осях У,-. Момент сопротивления повороту Мс равен сумме моментов сопротивления повороту секций.
На основании рис. 68 и принятых допущений (см. разд. 31) получим систему общих уравнений, описывающих криволинейное движение сочлененного автомобиля полуприцепного типа:
уравнения динамического равновесия
Л?с+Ло + 1 sin sin 61 2-УI (4i cos 6i + 2/i)-f
+ cos 61 — Гз/ 2 cos + Г4 (/ 2 cos 62 + 21) = 0; + Pi cos 61 + Я2 cos 62+r 1 sin 61 — K2 sin 61 —
-Kgsin e2 + r4Sin 92=0; Pj, -PiSin ej + Pj sinOa + ri cos 61 — — У 2 cos 01 -f K3 cos 02 — Г4 cos 62=0;
Источник статьи: http://sawi.ru/mnogoostnost/34.html
Схема поворота четырехосного автомобиля
Главная Конструктивные решения многоосных автомобилей
где =(/, cos Cj -f —/3) — R [(sin Cj — sin 04) -f -(P sin ai —
Г i=cosai-j-cos 04-f 2.
С целью получения сравнимых результатов схем управления 1-00-4 и 12-00 был проведен расчет кинематических характеристик поворота условных автомобилей по общим исходным данным: /, = L = 6 м; Кб=Ш кН/рад; Ga = 200 кН; b = L/2; привод колес полностью дифференциальный. Расчет проводился при равенстве максимальных углов поворота и равенстве радиусов поворота. Размещение осей по базе симметричное. Результаты расчета приведены на рис. 58.
Анализ графиков подтверждает известный вывод о том, что схема управления с передними и задними управляемыми колесами 1-00-4 дает значительное уменьшение радиуса поворота или потребных углов поворота осей, в данном случае -почти в 2 раза. Это главное и важное преимущество схемы 1-00-4 над схемой 12-00.
С изменением скорости у обеих схем в параболической зависимости изменяется смещение центра поворота. Несколько больше смещение для схемы 1-00-4. В соответствии с общей зависимостью (69) смещение центра а поворота связано с углами увода б осей, поэтому большее смещение должно дать большие углы увода. Радиус поворота для схемы 1-00-4 при увеличении скорости движения не изменяется. При схеме 12-00 радиус поворота с увеличением скорости незначительно возрастает.
Выводы по оценке кинематических характеристик двух схем рулевого управления условного автомобиля подтверждены экспериментальными данными, полученными на механических моделях [2].
При проведении экспериментов отмечено, что для многоосных автомобилей характерно большое смещение центра поворота а, которое может быть переменным даже при одном и том же угле а поворота колес. Центр поворота как бы плавает вокруг какого-то среднего значения. Здесь большое значение имеет абсолютное полное и частичное ——попеременное скольжение отдельных шин, которое трудно учесть при расчетах.
Рис. 58. Изменение радиуса и смещения центра поворота для двух схем рулевого управления четырехосного автомобиля в зависимости от скорости при равных углах поворота колес:
Источник статьи: http://sawi.ru/mnogoostnost/30.html
При равнорасположенных осях

» ID Новости: 1770
» Источник: Не указан
При равнорасположенных осях у четырехосного автомобиля в процессе поворота возникают значительные боковые усилия, главным образом у колес третьей и четвертой осей. Сближение этих осей уменьшает боковые усилия и в этом отношении целесообразно. Однако для увеличения проходимости, точнее – для улучшения преодоления автомобилем горизонтальных препятствий (канав, рвов и т. п.), выгоднее уменьшать расстояние между второй и третьей осями. В этом случае удобнее управляемыми делать колеса первой и четвертой осей. Автомобиль с такой схемой управления при движении на повороте прокладывает всего четыре колеи, в результате чего сопротивление повороту на деформируемых грунтах получается меньшим, чем у автомобиля с двумя передними управляемыми осями. Уменьшению сопротивления на повороте также способствует то обстоятельство, что поворот практически не вызывает циркуляции мощности. Наряду с улучшением проходимости автомобиля улучшается и поворотливость.
Рано или поздно перед любым автомобилистом станет вопрос замены той или иной запасти. В последнее время стали популярны интернет-магазины, так форд96.рф предлагает широкий ассортимент запчастей для автомобилей семейства Форд. Здесь вы можете найти оригинальные и неоригинальные детали, однако их объединяет одно — вся продукция имеет высокое качество и заслужила уважение автовладельцев в нашей стране. К тому же приемлемые цены станут дополнительным преимуществом.
Имеется ряд конструкций четырехосных автомобилей со всеми управляемыми колесами, Радиус поворота таких автомобилей определяется таким же образом, как у двухосных автомобилей со всеми управляемыми колесами, т. е. радиус поворота четырехосного автомобиля со всеми управляемыми колесами равен радиусу поворота двухосного автомобиля, имеющего такую же базу. При правильном подборе углов поворота управляемых колес, когда оси всех колес пересекаются в одной точке, лежащей на поперечной оси симметрии автомобиля, поворот с малой скоростью не вызывает увода колес, а следовательно, и боковых сил.
Сопротивление повороту у такого автомобиля будет наименьшим по сравнению с рассмотренными выше схемами поворота четырехосных автомобилей. Это объясняется не только тем, что отсутствуют боковые силы, но также и практически отсутствием циркуляции мощности и тем, что колеса при повороте на деформируемом грунте движутся только по четырем колеям. Однако рулевой привод к восьми управляемым колесам получается весьма сложным. Кроме того, четырехосный автомобиль со всеми управляемыми колесами обладает теми же недостатками, что и двухосный автомобиль со всеми управляемыми колесами.
Полное или частичное копирование материала допускается лишь при наличии текстовой гиперссылки, ведущей на данный материал!
Источник статьи: http://al-club.ru/news/pri_ravnoraspolozhennykh_osjakh/2015-10-15-1770
Схема поворота автомобиля
Основы проектирования рулевого управления автомобиля
Общие сведения
Рулевое управление служит для обеспечения (изменения или поддержания выбранного) заданного водителем направления движения автомобиля.
В общем случае, изменение направления движения автомобиля может осуществляться четырьмя способами:
– поворотом управляемых колес (колес передней оси, нескольких или всех осей);
– поворотом управляемых осей или тележек (передней, нескольких, всех осей или тележек);
– складыванием силовым звеньев (оппозитным способом);
– бортовым способом («по гусеничному» – затормаживанием колес одного борта).
Наиболее распространенным для автомобилей общего назначения является первый способ маневрирование – путем поворота управляемых колес.
Для автомобилей дорожной проходимости наибольшее распространение имеет схема рулевого управления с передними управляемыми колесами. Эта схема расположения управляемых колес наиболее оптимальна для обеспечения достаточно хорошей управляемости и устойчивости автомобиля с колесной формулой 4х2 и 6х4. Применение задней управляемой оси на транспортных автомобилях не используется.
Такой способ достаточно полно удовлетворяет большинству требований к управляемости и маневренности автомобиля. Поэтому назначение рулевого управления для транспортного автомобиля дорожной проходимости часто формулируется следующим образом: «Рулевое управление автомобиля служит для обеспечения заданного водителем направления движения автомобиля путем поворота его управляемых колес».
Второй способ поворота используется на некоторых автомобильных прицепах при работе автомобиля в составе автопоезда. Третий способ поворота применяется на сочлененных автомобилях. Последний способ, который производится за счет отключения от двигателя колес одного из бортов и их торможением специальным трансмиссионным тормозом, и подачей мощности к колесам другого борта, – наиболее рационален для короткобазных транспортных средств. Он связан с большим расходом мощности, но, как правило, упрощает и удешевляет конструкцию транспортного средства. Этот способ поворота используется в конструкциях некоторых многоосных автомобилей с равнорасположенными осями.
Все управляемые колеса применяют на автомобилях очень редко – на специальных транспортных средствах, когда необходимо существенно сократить радиус поворота.
В общем случае структура рулевого управления автомобиля включает в себя три составные части:
— рулевой механизм с рулевым валом и колесом;
Под рулевым приводом понимается система рычагов, валов, тяг и т.п., обеспечивающая передачу необходимого усилия от рулевого механизма (как правило, от сошки) на управляемые колеса с помощью усилителя или без него, и обеспечивающая требуемое соотношение углов поворота управляемых колес для их качения без скольжения относительно опорной поверхности. Как следует из сказанного выше, усилитель применяется в рулевом управлении для обеспечения легкости управления автомобилем при маневрировании.
Конструкция рулевого управления автомобиля должна удовлетворять следующим требованиям:
1. обеспечивать заданную траекторию криволинейного или прямолинейного движения автомобиля с необходимыми параметрами поворотливости, поворачиваемости и устойчивости. При этом автомобиль должен поворачиваться с заданным минимальным радиусом.
Выполнение этого требования влияет на выбор числа управляемых колес, схему поворота, максимальные углы поворота управляемых колес, а также на выбор типа рулевого управления (механическое, гидравлическое, электрическое, комбинированное, с усилителем или без него), передаточное число рулевого механизма и закон его изменения. Оценочные показатели, методы из экспериментального определения и нормативные значения для различных категорий автомобилей приведены в ОСТ 37.001.471 и РД 37.001.005.
В теории автомобиля под поворотливостью понимают способность автомобиля совершать поворот или разворот за минимальное время. Поворотливость оценивается угловой скоростью поворота автомобиля. Поворачиваемость – это свойство автомобиля совершать повороты с заданной кривизной на дороге и на местности, т.е. изменять курсовой угол в соответствии с управляющим воздействием. Чем меньше радиус поворота и больше кривизна, тем лучше поворачиваемость автомобиля.
2. усилие, прикладываемое к рулевому колесу при маневрировании автомобиля, не должно превышать нормативного значения.
В соответствии с требованиями ГОСТ 21398 усилие на рулевом колесе не должно превышать 120Н при наличии усилителя в рулевом управлении , 500Н – при неработающем усилителе и 250Н – для рулевого управления без усилителя. Для грузовых автомобилей стран Западной Европы рекомендуемое усилие на рулевом колесе составляет 120…160Н, а в США – 50…120Н. при этом по мере увеличения угла поворота управляемых колес усилие на рулевом колесе должно возрастать, чтобы обеспечить водителю возможность определить положение управляемых колес. При наличии усилителя должна быть обеспечена кинематическая и силовая согласованность между поворотом рулевого и управляемых колес. ГОСТ Р 52302-2004 предусматривает следующие усилия на рулевом колесе в зависимости от категории АТС (таблица 01).
| Категория АТС | Усилие на рулевом колесе, Н, не более | ||
| Неподвижный автомобиль | Движущийся автомобиль | ||
| Без рулевого усилителя | С рулевым усилителем | С исправным усилителем | При отказе усилителя |
| M1 | |||
| M2 | |||
| M3 | |||
| N1 | |||
| N2 | |||
| N3 | 450 * | ||
| * Для грузовых автомобилей с двумя или большим числом мостов (осей) с управляемыми колесами допускается 500 Н. |
3. суммарное число оборотов рулевого колеса от среднего положения до каждого из крайних не должно превышать 1,8 для легковых автомобилей и 3,0 – для грузовых, а передаточное число рулевого механизма должно быть максимальным в начале поворота рулевого колеса от среднего положения и регрессивно уменьшаться к концу его поворота. Холостой ход рулевого колеса не должен превышать 25…30 0 . При этом рулевое управление должно обеспечивать высокую чувствительность при передаче нагрузки от рулевого колеса к управляемым колесам.
Это требование обеспечивается минимальными зазорами во всех сочленениях рулевого управления.
Статическая чувствительность рулевого управления автомобиля, которая характеризует возможность объезда неожиданного препятствия без изменения положения рук на рулевом колесе, должна быть в пределах:  (м*рад) -1 , при этом
(м*рад) -1 , при этом  , где
, где  – кривизна траектории автомобиля при маневрировании:
– кривизна траектории автомобиля при маневрировании:  , где
, где  – радиус поворота автомобиля;
– радиус поворота автомобиля;  – угол поворота рулевого колеса. Кинематическая чувствительность рулевого управления определяется выражением:
– угол поворота рулевого колеса. Кинематическая чувствительность рулевого управления определяется выражением:  , где
, где  – передаточное число рулевого управления, а
– передаточное число рулевого управления, а  – база автомобиля.
– база автомобиля.
4. поддерживать такое соотношение между углами поворота управляемых колес, при котором качение всех колес автомобиля не сопровождается боковым скольжением. При повороте автомобиля его колеса должны катиться по концентрическим окружностям, что обеспечит отсутствие из бокового проскальзывания относительно опорной поверхности.
5. прямой КПД рулевого механизма должен быть выше обратного. Под прямым КПД понимают КПД при передаче нагрузок от рулевого колеса на управляемые колеса, а под обратным – от управляемых колес к рулевому колесу.
Выполнение этого требования обеспечит снижение динамических нагрузок на рулевом колесе при наезде управляемых колес на неровности дороги. Однако для обеспечения стабилизации управляемых колес в направлении прямолинейного движения рулевое управление проектируют на пределе обратимости, т.е. так, чтобы все нагрузки от управляемых колес уравновешивались в рулевом механизме и на рулевое колесо практически не передавались.
6. при выходе их строя усилителя должна сохраняться возможность управления направлением движения автомобиля.
7. конструкция рулевого управления должна быть проста, иметь малые размеры и массу, надежной в работе и быть приспособленной для проведения технического обслуживания.
Оценочными параметрами рулевого управления являются:
– минимальный радиус поворота автомобиля;
– силовое и кинематическое передаточные числа;
– величина зазора в зацеплении;
– КПД рулевого управления в целом и его составных частей.
В общем случае классификация рулевых управлений автомобиля может быть представлена следующим образом:
по расположению рулевого колеса и механизма:
§ с левым расположением,
§ с правым расположением;
по конструкции рулевого механизма:
§ червячные (с сектором или роликом),
§ кривошипно-винтовые (с шипом у кривошипа; с гайкой у кривошипа);
по конструктивным особенностям привода:
§ привод к управляемым колесам;
§ привод к управляемым осям (тележкам);
§ привод к складывающимся звеньям;
§ передняя и задняя трапеция;
по принципу действия усилителя:
· гидравлический усилитель (с открытым или закрытым центром);
· пневматический усилитель (в том числе — вакуумные);
по числу управляемых колес:
§ на передней оси;
§ на двух передних осях;
§ на передней и задней оси; …
Расстановка (расположение) управляемых колес зависит от типа и назначения автомобиля, его колесной формулы (рис..1).

Во всех случаях, когда это допустимо, число пар управляемых колес стремятся выбрать наименьшим. Это упрощает конструкцию рулевого управления, повышает устойчивость движения (меньше люфты и выше жесткость привода…).
Но если число пар управляемых колес меньше, чем (n-1), где n – общее число осей, то при повороте автомобиля неизбежно боковое скольжение неуправляемых колес. Таким образом, при повороте автомобиля с задней тележкой, особенно при установке пневмокатков, всегда будет иметь место скольжение колес тележки. Оно будет снижаться при уменьшении базы тележки (рис. 1-б).
Схема поворота автомобиля
Схема поворота автомобиля рис.2 должна обеспечить минимальное боковое скольжение колес или исключать его для повышения параметров устойчивости автомобиля при выполнении поворота и увеличения срока службы шин. Это обеспечивается перемещением колес при повороте по концентрическим окружностям.
Для неуправляемых колес автомобиля с колесной формулой 4х2 это условие обеспечивается при положении центра поворота на продолжении осевой линии этих колес. Для автомобиля с колесной формулой 6х4 или 6х6 с тележечной компоновкой задней и средней оси это условий для неуправляемых колес задней тележки практически не может быть выполнено. Минимизация бокового скольжения этих колес при повороте автомобиля обеспечивается минимальным смещением центра поворота от осевой линии колес мостов. Для этого стараются уменьшить базу задней тележки.

Рис. 2. Схема поворота автомобиля:
– а) с жесткими шинами; – б) с эластичными шинами.
Управляемые колеса автомобиля для отсутствия бокового скольжения при повороте должны поворачиваться на разные углы. Разность углов их поворота обеспечивается условием:
 ,
,
где:  – теоретический радиус поворота автомобиля по внешнему управляемому колесу;
– теоретический радиус поворота автомобиля по внешнему управляемому колесу;
 – расстояние между осями ворота управляемых колес;
– расстояние между осями ворота управляемых колес;
 и
и  – углы поворота управляемых коле левого и правого бортов соответственно;
– углы поворота управляемых коле левого и правого бортов соответственно;
 – вынос управляемого колеса относительно оси его поворота.
– вынос управляемого колеса относительно оси его поворота.
Координаты положения центра поворота:
 .
.
Эти выражения справедливы для поворота автомобиля с абсолютно жесткими колесами (рис. 2-а). При повороте автомобиля с эластичными колесами картина поворота автомобиля будет иной (рис.2-б). за счет бокового увода шин мгновенный центр поворота автомобиля смещается с линии оси задних колес. Направление такого смещения зависит от соотношения боковой жесткости шин передней и задней осей. Кроме этого боковой увод эластичных шин приведет к уменьшению или увеличению величины радиуса поворота автомобиля (в зависимости от соотношения жесткостей шин передней и задней осей). Более подробно влияние бокового увода на поворачиваемость автомобиля рассматривается в курсе Теория автомобиля
Другие способы (схемы) изменения направления движения меньше распространены на автомобилях. К таким способам относятся следующие.
Поворот складыванием применяется на специальных длиннобазных транспортных средствах для выполнения требования повышенной маневренности на ограниченных площадках. Или для автомобилей высокой проходимости для снижения сопротивления при повороте на податливых опорных поверхностях.
Поворот «по гусеничному» применяется при относительно небольшой базе автомобиля с числом осей больше двух.
Источник статьи: http://poisk-ru.ru/s10182t1.html