Моторист-рулевой
Рулевое устройство является основным средством, обеспечивающим надежное управление судном при любых условиях плавания. Его конструкция должна удовлетворять требованиям Речного Регистра, предъявляемым к судну данного типа. Оно состоит из руля, рулевого привода, рулевой машинки, аксиометра, а иногда и рулевого указателя. В настоящее время на судах находят применение поворотные насадки, активные рули и подруливающие устройства.
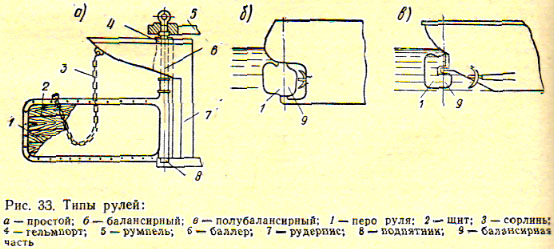 Рули в зависимости от формы и расположения пера по отношению к оси вращения подразделяются на простые, балансирные и полубалансирные (рис. 33).
Рули в зависимости от формы и расположения пера по отношению к оси вращения подразделяются на простые, балансирные и полубалансирные (рис. 33).
Простым называется руль, у которого перо расположено по одну сторону оси вращения (баллера). По форме профиля в плане простые рули могут быть плоскими (пластинчатыми) и обтекаемыми. Балансирным называется руль, у которого перо расположено по обе стороны баллера. Передняя по отношению к баллеру часть пера называется балансирной частью. В зависимости от конструкции кормовой части судна балансирные рули могут иметь нижнюю опору крепления или быть подвесными. Подвесной балансирный руль крепится на палубе или в корпусе судна (ахтерпике) на специальном фундаменте.
 Полубалансирный отличается от балансирного руля тем, что его балансирная часть меньше по высоте, чем все перо руля, и расположена только в нижней части.
Полубалансирный отличается от балансирного руля тем, что его балансирная часть меньше по высоте, чем все перо руля, и расположена только в нижней части.
Для обеспечения управляемости на заднем ходу толкачи оборудуются рулями заднего хода (так называемыми фланкирующими), которые устанавливаются впереди гребных винтов с таким расчетом, чтобы поток воды, возникающий при работе винтов на задний ход, был направлен на эти рули.
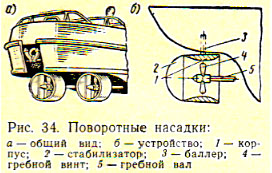
Поворотная насадка (рис. 34) представляет собой металлический цилиндр, внутри которого находится гребной винт судна. Своей верхней частью цилиндр крепится к баллеру, при помощи которого его можно поворачивать относительно гребного винта.
 У выходного отверстия насадки, для большей эффективности ее действия на управляемость судна, укреплен пластинчатый руль, который часто называют стабилизатором. С этой же целью в дополнение к стабилизатору иногда насадки оборудуются радиальными ребрами жесткости и шайбами.
У выходного отверстия насадки, для большей эффективности ее действия на управляемость судна, укреплен пластинчатый руль, который часто называют стабилизатором. С этой же целью в дополнение к стабилизатору иногда насадки оборудуются радиальными ребрами жесткости и шайбами.
Подруливающее устройство представляет собой трубу, установленную поперек корпуса судна, через которую с борта на борт прокачивается забортная вода с помощью центробежного насоса или винта. В первом случае подруливающее устройство называют насосным, а во втором-туннельным. Выходные отверстия в бортах имеют профилированную наделку и решетки для защиты трубы (туннеля) от попадания посторонних предметов. Принцип действия устройства заключается в том, что при перекачке (прогонке) воды с одного борта на другой вследствие реакции выбрасываемой струи создается упор, перпендикулярный диаметральной плоскости судна, что способствует перемещению судна вправо или влево. При изменении направления выброса струи будет изменяться и направление перемещения судна.
 Рулевые приводы служат для передачи усилий от рулевой машины на баллер руля. Наибольшее распространение получили приводы секторного типа с гибкой или жесткой передачей.
Рулевые приводы служат для передачи усилий от рулевой машины на баллер руля. Наибольшее распространение получили приводы секторного типа с гибкой или жесткой передачей.
.jpg) Рис. 37. Схема электрогидравлического рулевого устройства
Рис. 37. Схема электрогидравлического рулевого устройства
При гибкой передаче, которая получила название штуртросовой, усилие с рулевой машины на сектор передается при помощи цепи, стального гибкого троса или стального прутка. Цепь обычно ставят на участке, проходящем через звездочку рулевой машины, а на прямых участках — стальной трос или пруток. Для соединения отдельных участков штуртроса применяются замки, зажимы и талрепы. Чтобы изменить направление штуртроса, на криволинейных участках ставят направляющие блоки-роульсы, а для предохранения штуртроса от истирания о палубу — палубные катки.
В последнее время на судах находят все большее применение жесткие передачи — валиковые и шестеренчатые.
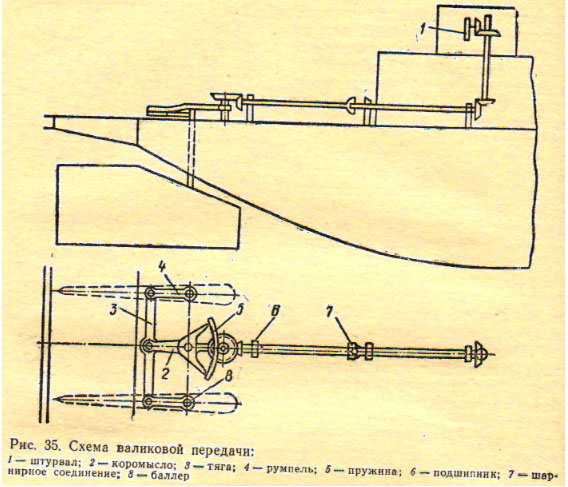
Валиковая передача (рис. 35) представляет собой систему жестких звеньев валиков, соединенных между собой универсальными шарнирами или коническими зубчатыми шестеренчатыми передачами.
Шестеренчатая передача представляет собой систему шестерен и валиков, при этом усилие рулевой машины передается на сектор руля с помощью червяка через шестерню.
На судах, имеющих два и более рулей, рулевой привод имеет более сложную конструкцию.
Рулевые машины по своей конструкции делятся на ручные, паровые, электрические и гидравлические.
Ручные рулевые машины просты по конструкции, поэтому их устанавливают на небольших судах (катерах) и на несамоходном флоте. Основными элементами ручных рулевых машин являются штурвальное колесо и связанный с ним барабан, на который наматывается цепь или трос (при штуртросной передаче). Если на судне применяется не штуртросная, а валиковая передача усилий от рулевой машины к рулю, то штурвальное колесо соединяется с шестеренчатым или червячным приводом, который механически связан с этой валиковой передачей.
Паровые рулевые машины ставятся на пароходах в качестве основных.
На большинстве современных теплоходов нашли применение электрические рулевые машины. Они устанавливаются в рулевой рубке или в румпельном отделении, находящемся в кормовом отсеке судна. Электродвигатель приводится в действие с пульта управления из рулевой рубки. Пульт управления имеет манипулятор. Поворотом рукоятки манипулятора вправо или влево включаются соответствующие контакты, и вал электродвигателя начинает вращаться в правую или в левую сторону, изменяя положение рулей судна. Если рули повернутся на тот или иной борт до своего крайнего положения, контакты размыкаются и электродвигатель автоматически выключается.
.jpg) Рис. 38. Схема гидравлического рулевого устройства теплохода «Метеор»:
Рис. 38. Схема гидравлического рулевого устройства теплохода «Метеор»:
1-цилиндр-исполнитель; 2-гидроусилитель; 3-штурвал; 4-цилиндр-датчик; 5-рулевая машина; 6-расходный бачок; 7-баллон с воздухом; 8-ручной аварийный насос; 9-гидронасос; 10-гидроаккумулятор
На заметку: Киевская автошкола Штурман проводит обучение вождению и повышение водительских навыков.
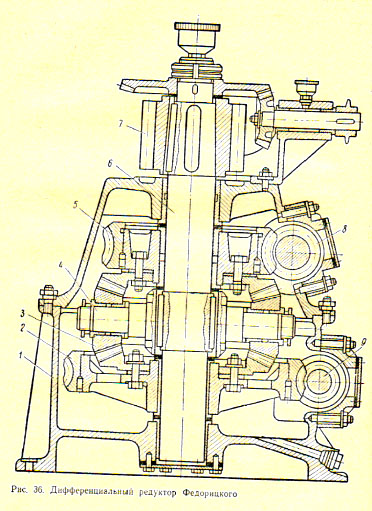
При установке электрических рулевых машин в обязательном порядке предусматривается резервный (запасной) ручной привод рулевого устройства. Чтобы не выполнять каких-либо переключений, при переходе на ручное управление применяют дифференциал Федорицкого.
Этот дифференциал (рис. 36) устроен и работает следующим образом. Червячные шестерни (колеса) 2 и 5 свободно вращаются на вертикальном валу 6. Внутренние торцовые поверхности этих червячных шестерен жестко связаны с коническими шестернями. На вертикальном валу при помощи шпоночного соединения закреплена крестовина 4, на конце которой свободно вращаются конические шестерни-сателлиты 3, связанные с коническими шестернями червячных колес 2 и 5. На верхний конец вала 6 посажена на шпонке цилиндрическая шестерня 7, входящая в зацепление с зубчатым сектором рулевого привода.
Червячный винт 9 вращается электродвигателем рулевого устройства. Червячный винт 8 связан с ручным запасным приводом и при работе электродвигателя неподвижен. Вследствие этого оказывается застопоренной червячная шестерня 5 с прикрепленной к ней снизу конической шестерней. Червячная шестерня 2 вращается винтом 9, а ее коническая верхняя шестерня заставляет вращаться шестерни-сателлиты 3. Но поскольку шестерня 5 застопорена, то шестерни 3 обегают по ее конической части, поворачивая крестовину 4, связанный с ней вал 6 и шестерню 7. Зубчатый сектор, соединенный шестерней 7, поворачивается.
При ручном управлении застопоренной оказывается червячная шестерня 2. Тогда при вращении червячного винта 9 шестерни-сателлиты обегают коническую шестерню червячного колеса 2, за счет чего происходит поворот вала 6.
Дифференциал Федорицкого является одновременно и регулятором, снижающим число оборотов вала 6 по сравнению с оборотами вала электродвигателя (т. е. червячного винта 9). Регулятор заключен в корпус 1.
Гидравлические рулевые машины, несмотря на целый ряд положительных качеств, получили на речном флоте меньшее распространение. Они устанавливаются главным образом на крупных и скоростных судах с подводными крыльями. Принцип их работы заключается в следующем (рис. 37): электродвигатель 1 приводит в действие насос 2, перекачивающий масло в правый 5 или левый 3 гидравлический цилиндр, в результате чего в цилиндрах перемещается поршень 6 и соединенный с ним румпель 4 рулевого привода, осуществляющий поворот рулей судна.
Гидравлический рулевой привод теплохода на подводных крыльях «Метеор» представлен на рис. 38. Он состоит из силовой системы и системы управления гидроусилителем.
В силовую (открытую) систему входят гидронасос с электроприводом, гидроусилитель, гидроаккумуляторы, расходный бак, фильтры, баллон с воздухом емкостью 8 л с давлением 150 кгс/см2, ручной аварийный насос, арматура и трубопроводы.
Система управления гидроусилителем (закрытая) состоит из цилиндров-датчиков, приводимых в действие от штурвала рулевой машины, цилиндров-исполнителей, заполнительного бачка, арматуры и трубопроводов.
В качестве рабочей жидкости в системе применяется авиационная смесь АМГ-10 (авиационное масло для гидравлики).
В рулевом приводе предусмотрено комбинирование ручного и гидравлического управления, что дает возможность в случае отказа гидравлического управления немедленно перейти на ручное.
Все крупные суда независимо от того, имеют ли они паровые, электрические или гидравлические машины, должны иметь запасное ручное управление. Время перехода с основного управления рулем на запасное не должно превышать 1 мин.
Усилие на рукоятке штурвала ручных рулевых приводов не должно превышать 12 кгс.
Продолжительность перекладки руля с борта на борт на самоходных судах с механическими или электрическими машинами не должна превышать 30 с, а с ручными — 1 мин. Аксиометр — механический или электрический прибор, служащий для указания угла отклонения пера руля. На новых судах аксиометр устанавливается на пульте управления.
Рулевые указатели конструктивно связаны только с головкой баллера руля, они показывают истинное положение руля независимо от работы рулевых приводов. Показание электрического рулевого указателя может быть выведено непосредственно в рулевую рубку судна.
Источник статьи: http://rulewoy.ru/statya/RULEVOE-USTROYSTVO.php
Рулевые машины
Рулевые машины по виду используемой энергии делятся на ручные, паровые, электрические и гидравлические. Часто применяют различные комбинации этих основных типов: пароручные, парогидравлические, ручные гидравлические и электрогидравлические.
Ручные рулевые машины устанавливают только на небольших самоходных судах. Как правило, их комбинируют со штуртросовой проводкой или валиковой передачей. Конструкция этих машин довольно проста и включает в себя штурвальную тумбу, внутри которой располагается зубчатая передача (ведущая и ведомая шестерни), тяговый барабан (при штуртросовой проводке) или звездочки (при цепном штуртросе). Вся система приводится в движение от штурвального колеса, поворачиваемого руками штурвального. Процесс управления судном в этом случае становится довольно утомительным и требует от штурвального большой внимательности. Для облегчения его работы ранее применялись пароручные рулевые машины, которые, как правило, изготовлялись двухцилиндровыми в вертикальном или горизонтальном исполнении. На современных судах паровые рулевые машины полностью вытеснены ручными гидравлическими плунжерными рулевыми машинами, облегчающими и упрощающими управление судном.
Схема ручной гидравлической рулевой машины приведена на рис. 112. Внутри штурвальной тумбы 8 смонтирован ручной масляный нагнетательный насос 7, приводимый в действие вращением штурвала 9. При помощи труб 1 насос соединяется с двумя гидравлическими цилиндрами 2 рулевой машины. В цилиндрах перемещается плунжер 10, связанный с баллером 5 руля 6 посредством регистра 3 и румпеля 4. В зависимости от направления вращения штурвала масло подается насосом в один из цилиндров, и руль соответственно перекладывается на тот или иной борт. Обводной трубопровод 1 снабжается предохранительным клапаном 11, предназначенным для перепуска масла при повышении давления в системе выше номинального.

Рис. 112. Схема ручной гидравлической румпельной рулевой машины.
Ручные гидравлические машины создают небольшие крутящие моменты на баллере руля (2500—10 000 н · м) и очень редко снабжаются следящей системой контроля за перекладкой руля, поэтому они применяются в основном для судов малого водоизмещения. На средне- и крупнотоннажных судах находят широкое применение электрические, гидравлические и электрогидравлические рулевые машины большой мощности, снабженные следящими системами контроля и позволяющие автоматизировать управление ими.
Электрические рулевые машины, широко распространенные на судах транспортного флота, имеют в качестве исполнительного рулевого двигателя реверсивный электродвигатель с большой частотой вращения (до 3000 об/мин). Поэтому исполнительный электродвигатель спаривают с червячной передачей, передающей крутящий момент на зубчатый сектор баллера руля и позволяющей значительно уменьшить частоту вращения рулевого привода. Кроме того, самотормозящая червячная пара (червяк и червячное колесо) при остановке электродвигателя обеспечивает остановку руля.
Исполнительный электродвигатель управляется из рулевой рубки нажатием кнопки или вращением штурвала. При кнопочном управлении электродвигатель запускается нажатием кнопки соответствующего борта и вращается в определенном направлении до тех пор, пока кнопка не будет отпущена. Управление штурвалом обеспечивает курсозависимое дистанционное управление, т. е. управление, при котором угол отклонения руля соответствует отклонениям указателя положения руля при штурвальной тумбе.
Электрические рулевые машины изготовляют для работы как rfa постоянном, так и на переменном токе. Обычно их используют при диапазоне крутящих моментов на баллере от 6300 до 16 000 н-м, т. е. в основном для судов среднего водоизмещения.
Электрогидравлические рулевые машины, устанавливаемые на современных крупных морских судах и быстроходных судах среднего водоизмещения, имеют гидравлический привод баллера руля (рис. 113). Такой привод располагается в румпельном помещении судна и передает от рулевой машины непосредственно на баллер руля усилие, необходимое для его поворота. Для этой цели служат четыре (или два) гидравлических цилиндра 3, соединенных посредством двух поперечных 2 и двух продольных 4 балок в один общий блок. Крепление блока к судовому фундаменту производится лампами 1 цилиндра 3.

Рис. 113. Гидравлический привод баллера руля.
В цилиндрах располагаются плунжеры 6, перемещающиеся вдоль оси цилиндров под давлением масла, шарнирно соединенные при помощи цапф 7 с поперечным румпелем 8. Румпель, при помощи шпонок жестко соединяется с баллером 9 руля. Для
уменьшения нагрузки от боковых усилий, возникающих при повороте румпеля, плунжеры 6 имеют ползуны 5, скользящие по направляющим плоскостям продольных балок. При повороте румпеля его цапфы 7 перемещаются в шарнирах 11 (см. узел А), цапфы 10 которых при этом могут вращаться в отверстиях вилок плунжеров вокруг оси I—I. Таким образом обеспечивается свободный поворот румпеля, а вместе с ним и руля при продольном перемещении плунжеров в гидравлических цилиндрах привода.
В состав электрогидравлической рулевой машины (рис. 114), кроме гидравлического привода А, входят следующие основные узлы: масляные электронасосы переменной производительности Б; механизм В управления насосами переменной производительности; масляный трубопровод Д с главной клапанной коробкой; телемоторы Г, предназначенные для гидравлического управления рулевой машиной с дистанционных постов управления № 1 я № 2; ручной (аварийный) масляный насос и система указателей положения руля (на схеме не показаны).

Рис. 114. Схема электрогидравлической рулевой машины.
Устройство и принцип действия электронасосов Б переменной производительности были рассмотрены ранее в § 29 (см. рис. 94).
Эти насосы подают масло под Давлением до 15 000 кн/м 2 (150 кгс/см 2 ) в гидравлические цилиндры привода А в зависимости от расположения направляющего кольца насоса. В указанном положении (рис. 114) рабочее масло по трубам 5 и 6 нагнетается насосом переменной производительности Б в главную коробку 7, а из нее по трубам 4 и 8 направляется в два гидравлических цилиндра 2, расположенных по диагонали. В это время из другой пары цилиндров масло отсасывается вторым насосом переменной производительности. Под давлением масла плунжеры 1 перемещаются вдоль осей цилиндров, передавая усилия на цапфы 9 поперечного румпеля 10 и поворачивая баллер 11 руля. Поворот руля (в данном случае на правый борт) будет происходить до тех пор, пока тяга 3 не возвратит направляющее кольцо насоса переменной производительности в среднее положение. При этом подача масла в гидравлические цилиндры прекратится и руль будет зафиксирован в заданном положении.
Гидравлический телемотор Г состоит из двух цилиндров с поршнями. Один из цилиндров (передаточный) установлен на ходовом мостике, другой (приемный) — у рулевой машины. Полости цилиндров соединены трубопроводом, вся система заполнена жидкостью— обычной водой с глицерином. Вращение штурвала передается поршню передаточного цилиндра, вызывая его перемещение и увеличение давления жидкости на поршень приемного цилиндра. В результате этого поршень приемного цилиндра перемещается, воздействуя при помощи системы тяг на насосы переменной производительности, связанные трубопроводом рабочего масла с гидравлическим приводом баллера. Таким образом, все основные узлы электрогидравлической рулевой машины соединяются между собой трубопроводом, который состоит из труб рабочего масла, труб управления телемотором, труб смазочного масла и арматуры. По трубам смазочного масла подается смазка к трущимся частям рулевой машины.
Наиболее важной арматурой является главная распределительная коробка, в которой размещены четырнадцать клапанов: восемь разобщительных — по четыре клапана для насосов переменной производительности и для гидравлических цилиндров привода, четыре перепускных и два предохранительных. Все эти клапаны служат для регулирования подачи рабочего масла к механизмам рулевой машины и предохранения всей системы от повышенного давления масла.
Электрогидравлические плунжерные рулевые машины находят в настоящее время преимущественное применение по сравнению с другими типами рулевых машин. Это объясняется тем, что они имеют более гибкое регулирование скоростей в широком диапазоне и точный контроль положения руля. Отечественные рулевые машины такого типа выполняются в двух вариантах: двухцилиндровые— с вращающим моментом на баллере до 100 кн-м (10 тс-м) и четырехцилиндровые — с вращающим моментом от 160 до 2000 кн-м (от 16 до 200 тс-м). Рабочее давление масла у таких машин колеблется от 7000 до 15 000 кн/м 2 (от 70 до 150 кгс/см 2 ).
В последнее время на малых промысловых и транспортных судах (дедвейтом 25 000—29 000 т) стали применять лопастные, или крыльчатые, электрогидравлические рулевые машины. По сравнению с плунжерными такие машины значительно компактнее, проще и легче, у них отсутствуют массивные гидравлические приводы, отпадает необходимость в румпеле и т. д.
В состав лопастной электрогидравлической рулевой машины (рис. 115, а) входят: рулевая тумба 1 со штурвалом и телемотором, трубопровод 2, клапан остановки 3, насос переменной производительности 4 с электродвигателем 5, контактор 6 для пуска электродвигателя, лопастной гидромотор 7 и главная распределительная коробка 8. Ротор гидромотора (рис. 115, б), снабженный лопастями, непосредственно соединяется с баллером руля, а его лопасти располагаются между неподвижными сегментами. В эти полости от насоса 4 через каналы 10 и кольцевой зазор 9 подается рабочая жидкость под давлением 4500— 5000 кн/м 2 (45—50 кгс/см 2 ), которая давит на лопасти, создавая необходимый вращающий момент на баллере. Поворот руля на правый или левый борт зависит от направления подачи рабочей жидкости (масла) к гидромотору. Гидромотор крепится к судовому фундаменту основанием 11.

Рис. 115. Схема лопастной электрогидравлической рулевой машины.
Большой интерес представляет применение в качестве привода баллера гидравлического шарнира, представляющего собой винтовое соединение вала баллера с подвижной гайкой, помещенной в гидравлическом цилиндре. Гайка специальными выступами соединяется с цилиндрической стальной рубашкой, закрепленной при помощи шпонок на валу баллера. При подаче рабочей жидкости в одну из полостей между корпусом цилиндра и гайкой жидкость давит на кольцевой фланец гайки, заставляя ее совершать вращательно-поступательное движение вдоль внутренней стенки цилиндра, имеющей винтовую нарезку. Вращательное движение гайки через рубашку передается на баллер. Совмещение гидравлического шарнира с баллером делает привод компактным и позволяет практически отказаться от румпельного отделения.
При использовании электрогидравлических рулевых машин на современных судах стало возможным применение системы автоматического удержания судна на заданном курсе с помощью авторулевого. Этот прибор, компонуемый в виде штурвальной тумбы, автоматически воздействует на рулевой привод при получении сигнала от датчика курса (обычно гирокомпаса).
Источник статьи: http://www.stroitelstvo-new.ru/sudostroenie/mmu/rulevye-mashiny.shtml