Сверхпереходные параметры синхронной машины
По аналогии с разделом 6.1 рассмотрим явнополюсную синхронную машину с демпферными (успокоительными) обмотками, а также схемы замещения по продольной и поперечной осям. По сравнению с машиной без демпферных обмоток пути изменившегося магнитного потока статора практически полностью замыкаются в воздушном зазоре и не проникают в магнитный ротор. Это приведет к еще большему уменьшению сопротивления машины в сверхпереходном режиме, то есть в начальный момент для машины с демпферными обмотками путь изменившегося магнитного потока статора синхронной машины с демпферными обмотками проходит вне ротора, что резко уменьшает  и, следовательно
и, следовательно  (рис. 6.6).
(рис. 6.6).
По оси q демпферная обмотка  оказывает влияние, подобное влиянию обмотки возбуждения машины без демпферных обмоток, что приводит к уменьшению сопротивления машины по поперечной оси и возникновению ЭДС
оказывает влияние, подобное влиянию обмотки возбуждения машины без демпферных обмоток, что приводит к уменьшению сопротивления машины по поперечной оси и возникновению ЭДС  .
.

Рис. 6.6. Путь изменившегося магнитного потока статора синхронной
машины с демпферными обмотками

Рис. 6.7. Схема замещения а) по продольной оси; б) по поперечной оси
Применим 2-й закон Кирхгофа к схеме рисунка 6.7а:
 , (6.9)
, (6.9)
где для (6.9) справедливо  .
.
В выражении (6.9)  – поперечная составляющая сверхпереходной ЭДС.
– поперечная составляющая сверхпереходной ЭДС.
Аналогичную операцию произведем для схемы рисунка 6.7б:
 . (6.10)
. (6.10)
Здесь  – продольная составляющая сверхпереходной ЭДС, при этом
– продольная составляющая сверхпереходной ЭДС, при этом  .
.
Тогда величины тока по продольной и поперечной оси и полного тока будут определяться как
 (6.11)
(6.11)

По выражениям (6.9) – (6.10) строится векторная диаграмма до и после короткого замыкания (рис. 6.8).
Рис. 6.8. Векторные диаграммы до и после КЗ
Таким образом, начальные ток и ЭДС приближенно могут быть найдены как
 (6.12)
(6.12)
6.3. Учет подпитки синхронных и асинхронных двигателей
при расчете токов КЗ
В начальный момент времени все двигатели, подключенные к системе, ведут себя как генераторы и посылают ток к месту короткого замыкания, увеличивая тем самым ток КЗ, т.е. осуществляется подпитка места, где произошло КЗ. При этом подпитка может достигать 30 % и более от общего тока, и ее необходимо учитывать в расчетах.
Рассмотрим простейшую схему ГПП промышленного предприятия, к которой подключены электродвигатели. Из рисунка 6.9 видно, что в наиболее тяжелых условиях при КЗ находится выключатель отходящей линии. Учет подпитки всегда производится для наиболее тяжелого режима, то есть при включенном секционном выключателе. Можно сделать вывод о том, что номинальные токи не определяют выбор оборудования, силового питающего кабеля и т.д., решающее значение имеют токи КЗ, при расчете которых необходимо учитывать подпитку от всех двигателей.

Рис. 6.9. Подпитка двигателями места КЗ на ГПП
Синхронный двигатель (СД).
Подпитку от синхронного двигателя учитывают как в ударном, так и в отключаемом токе КЗ. СД может работать в двух режимах:
− режим перевозбуждения – при этом  . Если
. Если  при КЗ, то двигатель будет посылать ток к месту КЗ (рис. 6.10);
при КЗ, то двигатель будет посылать ток к месту КЗ (рис. 6.10);

Рис. 6.10. Расчетная схема замещения
сверхпереходный ток КЗ при этом
 ; (6.13)
; (6.13)
− режим недовозбуждения – при этом  . В этом случае, если , то двигатель также будет посылать ток к месту КЗ.
. В этом случае, если , то двигатель также будет посылать ток к месту КЗ.
И сверхпереходный ток КЗ в данном случае будет находиться как
 . (6.14)
. (6.14)
Однако если же и  , то двигатель будет потреблять реактивный ток и не увеличивает ток в месте КЗ.
, то двигатель будет потреблять реактивный ток и не увеличивает ток в месте КЗ.
Обычно если двигатель отделен от места короткого замыкания более чем двумя трансформациями [2], подпитку можно не учитывать. При расчете подпитки синхронный двигатель необходимо рассматривать как перевозбужденный.
Асинхронный двигатель (АД)
Расчет подпитки от асинхронного двигателя производится подобно СД, но при меньших значениях ЭДС, что видно из векторной диаграммы рисунка 6.11. Как для СД, так и для АД не учитывается различие параметров по продольной и поперечной осям.

Рис. 6.11. Векторная диаграмма электродвигателя

Знак + соответствует перевозбужденному СД, знак – недовозбужденному СД либо АД.
Максимальный ток подпитки от асинхронного двигателя при трехфазном коротком замыкании на его выводах будет определяться как
, (6.15)
где:  , где
, где  − кратность пускового тока электродвигателя, .
− кратность пускового тока электродвигателя, .
Если двигателей много, то они рассматриваются как обобщенная нагрузка. При этом принимается  . Здесь значения приведены к полной номинальной мощности нагрузки и номинальным напряжениям той ступени, где она присоединена.
. Здесь значения приведены к полной номинальной мощности нагрузки и номинальным напряжениям той ступени, где она присоединена.
Пределы изменения реактивных сопротивлений синхронных генераторов и данных, необходимых для расчета подпитки места КЗ, приведены в таблицах 6.1 и 6.2:
Типовые реактивности генераторов
| Параметр | Турбогенератор (неявнополюсный) | Гидрогенератор (явнополюсный) |
 | 0,85…2,56 | 0,6…1,94 |
 | 0,18…0,46 | 0,2…0,57 |
 | 0,07…0,32 | 0,13…0,45 |
Сверхпереходные реактивные сопротивления и ЭДС
Источник статьи: http://infopedia.su/14xf63d.html
Схемы замещения синхронной машины.
Принцип действия синхронного генератора. Приводной двигатель развивает момент  , вращая ротор генератора с частотой
, вращая ротор генератора с частотой  . По обмотке ротора протекает постоянный ток
. По обмотке ротора протекает постоянный ток  , её МДС
, её МДС  создает магнитный поток ротора
создает магнитный поток ротора  . Вращаясь вместе с ротором относительно статора, поток в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в каждой фазе обмотки статора ЭДС
. Вращаясь вместе с ротором относительно статора, поток в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в каждой фазе обмотки статора ЭДС  . При замкнутой внешней цепи по обмоткам статора протекает ток нагрузки I, который, в свою очередь, образует МДС статора
. При замкнутой внешней цепи по обмоткам статора протекает ток нагрузки I, который, в свою очередь, образует МДС статора  . МДС создает магнитный поток реакции якоря
. МДС создает магнитный поток реакции якоря  и поток рассеяния
и поток рассеяния  (аналогичный асинхронному двигателю), который замыкается поперёк пазов статора и вокруг лобовых частей обмотки статора. Потоки и наводят в обмотке статора соответственно ЭДС
(аналогичный асинхронному двигателю), который замыкается поперёк пазов статора и вокруг лобовых частей обмотки статора. Потоки и наводят в обмотке статора соответственно ЭДС  и
и  .
.
Векторная сумма ЭДС  и падение напряжения на активном сопротивлении обмотки статора
и падение напряжения на активном сопротивлении обмотки статора  равно напряжению на выходах генератора U.
равно напряжению на выходах генератора U.
Магнитные потоки статора и складываются с магнитным потоком ротора , который, взаимодействуя с током статора I, образует тормозной момент  (обратная связь), противодействующий вращающему моменту приводного двигателя. Вырабатываемая статором генератора активная мощность P поступает в электрическую нагрузку.
(обратная связь), противодействующий вращающему моменту приводного двигателя. Вырабатываемая статором генератора активная мощность P поступает в электрическую нагрузку.
Уравнение напряжений обмотки статора.На рис 4.9 приведена схема замещения одной фазы статора генератора. Составим по этой схеме уравнения второго закона
 (4.1)
(4.1)
Здесь — ЭДС, индуцируемая магнитным потоком ротора ; и – ЭДС, индуцируемая соответственно магнитным потоком реакции якоря и потоком рассеяния; — падение напряжения на активном сопротивлении обмотки статора;U – фазное напряжение статора генератора.
 ЭДС и наводятся магнитными потоками и , которые пропорциональны вызывающему их току статора. Поэтому эти ЭДС могут быть выражены через постоянные индуктивные сопротивления
ЭДС и наводятся магнитными потоками и , которые пропорциональны вызывающему их току статора. Поэтому эти ЭДС могут быть выражены через постоянные индуктивные сопротивления  и
и  , т.е.
, т.е.  и
и  . Тогда
. Тогда  .
.
Обозначим сумму внутренних индуктивных сопротивлений машины  , где
, где  – синхронное сопротивление.
– синхронное сопротивление.
Обычно 
 . (4.2)
. (4.2)
Схема замещения генератора, отвечающая уравнению (4.2), изображена на рис. 4.8.
Векторная диаграмма синхронного генератора. Векторную диаграмму строят в соответствии с уравнением (4.2). Если нагрузка генератора активно-индуктивная, то вектор тока статора I отстает по фазе на угол  от вектора напряжения U, а вектор индуктивного
от вектора напряжения U, а вектор индуктивного  падения напряжения
падения напряжения  опережает вектор тока на угол
опережает вектор тока на угол  (рис. 4.10,а). Сумма векторов U и дает вектор ЭДС . Угол
(рис. 4.10,а). Сумма векторов U и дает вектор ЭДС . Угол  между векторами и U называют углом нагрузки, а угол между векторами и I обозначается
между векторами и U называют углом нагрузки, а угол между векторами и I обозначается  . ЭДС соответствует магнитный поток ротора , а напряжению U – результирующий магнитный поток машины
. ЭДС соответствует магнитный поток ротора , а напряжению U – результирующий магнитный поток машины  (рис. 4.9,б). В генераторном режиме поток опережает поток на угол , чему соответствует сдвиг на тот же угол полюса ротора
(рис. 4.9,б). В генераторном режиме поток опережает поток на угол , чему соответствует сдвиг на тот же угол полюса ротора  относительно полюса N и результирующего поля машины. Силовые линии магнитного поля между полюсами показаны тонкими сплошными линиями. В генераторном режиме в результате взаимодействия полюсов и Nобразуется противодействующий момент
относительно полюса N и результирующего поля машины. Силовые линии магнитного поля между полюсами показаны тонкими сплошными линиями. В генераторном режиме в результате взаимодействия полюсов и Nобразуется противодействующий момент  .
.
Работа синхронного генератора на автономную нагрузку. Синхронные генераторы работают в автономном режиме (рис. 4.4, б) в тех случаях, когда промышленная электрическая сеть имеет недостаточную мощность или вообще отсутствует, например, на удалённых строительных площадках, нефтяных и газовых промыслах, лесозаготовительных пунктах, морских и речных судах, летательных аппаратах и т.п. Напряжение на выводах автономно работающего синхронного генератора U в большой степени зависит от нагрузки и её характера.
Зависимость U(I) при n0=const, Iв=const и cosφ = const называется внешней характеристикой генератора. Семейство внешних характеристик синхронного генератора при различных cos изображено на рис. 4.10. Характеристики показывают, что напряжение генератора при активно – индуктивной нагрузке ( >0) довольно резко падает, что объясняется размагничивающим действием реакции якоря, а при активно–ёмкостной нагрузке (
По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию (а не в электрическую, как это происходит в трансформаторе), поэтому на схеме замещения добавляют переменное активное сопротивление r2‘(1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Zн.
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания.
Как и у трансформатора, у асинхронного двигателя есть Т-образная схемазамещения.
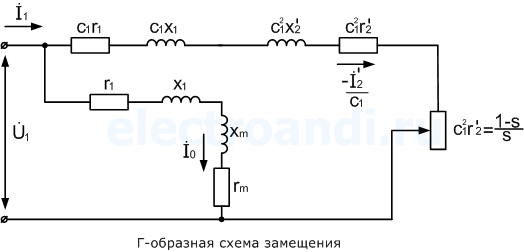 Более удобной при практических расчетах является Г-образная схемазамещения.
Более удобной при практических расчетах является Г-образная схемазамещения.
В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения подводимого к двигателю, к ЭДС статора.
 Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
 89. Схемы замещения трансформатора.
89. Схемы замещения трансформатора.
 Одним из средств изучения работы трансформатора является эквивалентная схема замещения, в которой магнитная связь между обмотками трансформатора замещена электрической связью, а параметры вторичной обмотки приведены к числу витков первичной.
Одним из средств изучения работы трансформатора является эквивалентная схема замещения, в которой магнитная связь между обмотками трансформатора замещена электрической связью, а параметры вторичной обмотки приведены к числу витков первичной.
 Так как в приведенном трансформаторе k=1, то и –E1=E2. В результате точки a1и a2, b1 и b2 имеют одинаковый потенциал, поэтому на схеме их можно соединить, получив тем самым Т-образную схему замещения трансформатора.
Так как в приведенном трансформаторе k=1, то и –E1=E2. В результате точки a1и a2, b1 и b2 имеют одинаковый потенциал, поэтому на схеме их можно соединить, получив тем самым Т-образную схему замещения трансформатора.
Параметры r1, x1 – активное и индуктивное сопротивления первичной обмотки, соответственно.
r2, x2 – приведенные значения активного и индуктивного сопротивлений вторичной обмотки, соответственно.
Zн – полное сопротивление нагрузки.
Магнитный поток не зависит от нагрузки, поэтому его представляют как индуктивное сопротивление xm, активное сопротивление rm, которое обусловлено магнитными потерями и протекающий через них ток холостого хода I0. Эти параметры определяются в опыте холостого хода трансформатора.
Изменяя Zн на схеме замещения, можно получить любой режим работы трансформатора. Например, при разомкнутой вторичной обмотке Zн= ∞, что соответствует режиму холостого хода трансформатора, а при Zн= 0 – режиму короткого замыкания. При любых других значениях Zн – режим работы под нагрузкой. Режимы работы необходимы для определения параметров схемы замещения.
При практических расчетах, током холостого хода пренебрегают, тогда схема сводится к упрощенной.
Источник статьи: http://infopedia.su/15x88c8.html