Разработка кинематической схемы машины.
Кинематическая, гидравлическая, пневматическая схемы машины отражают соответствующие принципы взаимодействия и работы элементов машины. Эти схемы дают представление о том, как механическая энергия и движение передаются от источника до пункта её потребления и преобразования. Схемы являются принципиальными и позволяют установить, какие элементы и сколько их входят в устройство и в каких сочетаниях (кинематических парах) они объединяются.
Кинематические схемы вычерчивают в виде плоскостного (вид спереди и вид сбоку) и пространственного изображений. На кинематической схеме указывают наименование каждой кинематической группы элементов и основные характеристики и параметры кинематических элементов. Если кинематическая схема служит для динамического анализа, то на ней указывают необходимые размеры и характеристики элементов. Каждому кинематическому элементу на схеме присваивают порядковый номер, валы нумеруют римскими цифрами, а остальные элементы – арабскими.
На кинематических схемах указывают тип, мощность и частоту вращения электродвигателей, размер, исполнение и передаточное отношение редукторов, диаметр и ширину шкивов, типы и количество клиновых ремней, число зубьев и модули зубчатых передач, число заходов, шаг и направление нагрузки червяков и так далее.
В качестве примера на рис. 4.1 приведена кинематическая схема двухступенчатого редуктора [2].
 Рис.4.1. Кинематическая схема двухступенчатого редуктора.
Рис.4.1. Кинематическая схема двухступенчатого редуктора.
I (Т) — тихоходный вал; II — промежуточный вал;
III (Б) – быстроходный вал.
Конечной целью проектирования кинематической схемы машины является воспроизведение заданных движений рабочих органов. При проектировании необходимо учитывать динамические свойства механизмов, так как они определяют динамические нагрузки и характер движения звеньев кинематических цепей.
В основе расчёта кинематических цепей механизмов лежат две задачи динамики: по известному закону движения ведущего звена определить силы, приложенные к звеньям механизма и по известным силам определить закон движения по уравнениям Лагранжа.
Первая задача решается методом кинетостатики по уравнению Даламбера [1]. Так, например, для кинематической цепи, трансформирующей кратные круговые движения
 (4.1)
(4.1)
где МКР = МДВ — крутящий и движущий моменты; МС – момент сопротивления; J — момент инерции.
Вторая задача заключается в определении закона движения в соответствии с уравнением Лагранжа. Так, для кинематической цепи, реализующей линейно-круговые движения, уравнение Лагранжа имеет вид:
 (4.2)
(4.2)
где РДВ и Р С — сила движущая и сила сопротивления; Jпр и mпр— приведённые моменты инерции и масса; Z — количество элементов кинематической цепи.
Гидравлические и пневматические механизмы являются завершающими элементами в гидро – и пневмосистемах, в которых, помимо этих механизмов, имеются двигатели – насосы, регуляторы давления и расхода рабочего тела (масла, воздух); распределители и переключатели потоков рабочих тел, контрольно-измерительные приборы и так далее.
Перечень элементов кинематических, гидравлических и пневматических схем оформляют в виде таблицы. На полях схем допускается указывать данные, необходимые для монтажа, испытания и проверки системы: маркировка трубопроводов, рабочие среды, рабочие давления, температуру и др. На рис. 4.2 показана гидравлическая схема механизма для приведения в движение силового поршня, шток которого связан с рабочим органом машины.

Рис.4.2 Гидравлическая схема механизма.
1 – распределитель; 2,6 – электромагниты; 3 – гидроцилиндр; 4 – поршень; 5 – тормозное устройство; 7 – масляный бак; 8 – фильтр; 9 – клапан переливной; 10 – гидронасос.
Схема пневматического механизма имеет аналогичный вид, только насос заменяется источником сжатого воздуха (компрессором), а выброс отработавшего воздуха производится в атмосферу.
Совокупность кинематических, гидравлических и пневматических элементов и устройств на схемах изображают в виде условных графических символов (рис.4.1; 4.2)
4.2 Методы расчёта механизмов при проектировании БМП
Кинематический расчёт выполняют с целью выбора типа механизма и определения таких размеров его звеньев, при которых механизм обеспечивает перемещение исполнительного органа по заданному закону в соответствии с требованиями технологического процесса.
Кинематические параметры механизмов определяют динамичность технологических нагрузок, давлений в кинематических парах и напряжений в звеньях механизмов.
Методы определения размеров звеньев и расчёта элементов кинематических пар для механизмов различных типов различны.
Основными задачами силового расчёта механизмов являются задачи определения при заданных условиях давления в кинематических парах; определение величины и закона движущих сил, размеров звеньев, обеспечивающих оптимальные динамические условия работы механизма.
Для удовлетворения требований работоспособности механизма его звенья и кинематические пары должны быть правильно рассчитаны.
К тихоходным механизмам применят статический метод силового расчета, при котором учитываются все действующие на механизм нагрузки, кроме инерционных.
К быстроходным машинам применяют кинетостатический метод расчета с учётом всех действующих сил, включая силы инерции.
В результате кинетостатического расчета можно определить давление в кинематических парах, силы, воздействующие на звенья; а также определить движущую силу, обеспечивающую движение механизма, нагруженного внешними силами:
РДВ = РС + РИ (  m) (4.3)
m) (4.3)
где РС и РИ (  ,m) – силы сопротивления и инерции, приведённые к главному звену; и m — ускорение и масса звена приведения.
,m) – силы сопротивления и инерции, приведённые к главному звену; и m — ускорение и масса звена приведения.
При динамическом проектировании новых механизмов сначала задаются приближённым законом движения ведущих звеньев механизма и внешними силами, а затем после определения конструктивных размеров звеньев решают вопрос об истинном движении спроектированного механизма с учётом различных действующих на него сил. После этого в ранее выполненный расчёт вносят необходимые коррективы.
Дата добавления: 2015-09-25 ; просмотров: 3368 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник статьи: http://helpiks.org/5-38195.html
Тема: СОСТАВЛЕНИЕ КИНЕМАТИЧЕСКИХ СХЕМ МЕХАНИЗМОВ
Цель работы — исследовать принцип действия и кинематику простейших механизмов; ознакомится с условным изображением звеньев и кинематических пар по ЕСКД.
Краткие теоретические сведения
Единая система конструкторской документации (ЕСКД) ГОСТ 2.101-68. «Виды изделий» устанавливает для всех отраслей промышленности следующие виды изделий: детали, сборочные единицы, комплексы и комплекты.
Деталь — изделие или часть его, изготовленное из однородного материала без применения сборочных операций. Ее называют неспецифицированным изделием, если она не имеет составных элементарных частей (вал, зубчатое колесо, болт, гайка и т. п.), и составным, или специфицированным, — если состоит из двух и более деталей.
Сборочная единица — специфицированное изделие, составные части которого соединены между собой при помощи сборочных операций (редуктор, кран, стрела крана, ковш, отвал и т. п.).
Комплекс — два или более специфицированных изделия, не соединенных сборочными операциями на предприятии-изготовителе, но предназначенные для выполнения взаимосвязанных эксплуатационных функций (буровая установка, технологическая линия, состоящая из нескольких станков и т. п.).
Комплект — набор изделий, не соединенных сборочными операциями на предприятии-изготовителе и имеющих общее эксплуатационное назначение вспомогательного характера (комплекты запасных частей, оснастки, инструментов и т. п.).
Звено — одна или несколько жестко соединенных деталей, входящих в состав механизма
Узел — часть машины, механизма, установки и т. п., состоящая из нескольких более простых деталей (например, подшипник).
Механизм — система звеньев, предназначенная для преобразования движения одного или нескольких звеньев в требуемые движения других. Если в преобразовании движения участвуют жидкая или газообразная среда, то механизм называется гидравлическим или пневматическим. Обычно в механизме имеется одно входное звено (деталь), получающее движение от двигателя, и одно выходное звено, соединенное с рабочим органом машины или указателем прибора.
Система — совокупность деталей, звеньев и элементов, обеспечивающих выполнение определенной функции машины. Например, система управления машиной обеспечивает согласованность движений рабочих органов в соответствии с заданной программой и т. п.
Машина — устройство, выполняющее механические движения для преобразования энергии, материалов и информации с целью получения новых продуктов и замены или облегчения физического и умственного труда человека. Так, с помощью строительных машин и устройств происходит перемещение грузов, материалов и других объектов в пространстве с требуемой скоростью. В энергетических машинах преобразуется энергия, а в информационных — вводимая информация для контроля, регулирования и управления движением. Машины могут состоять из одного или нескольких механизмов. Следовательно, любая машина представляет собой механизм или совокупность механизмов; однако не каждый механизм — машина. Основное назначение механизма заключается в передаче и преобразовании движения. Характерный признак машины заключается в выполнении ею полезной работы.
КИНЕМАТИЧЕСКИЕ СХЕМЫ
В тех случаях, когда интересуются только кинематикой машины или установки, т. е. когда рассматривают только части установки, обеспечивающие движение, схематические изображения могут быть значительно упрощены.
Правила выполнения кинематических схем изложены в ГОСТ 2.703—68* (СТ СЭВ 1187—78). Все элементы на схемах изображают условными графическими обозначениями по ГОСТ 2.770—68* или упрощенно в виде контурных очертаний.
Каждому кинематическому элементу, изображенному на схеме, как правило, присваивают порядковый номер, начиная от источника движения. При этом валы допускается нумеровать римскими цифрами, остальные элементы нумеруют только арабскими цифрами. Порядковый номер элемента проставляют на полке линии-выноски, основные характеристики и параметры кинематического
элемента располагают под полкой линии-выноски.
В ГОСТ 2.770—68* приведено свыше 200 условных обозначений для кинематических схем, которыми и следует пользоваться при составлении и чтении схем.
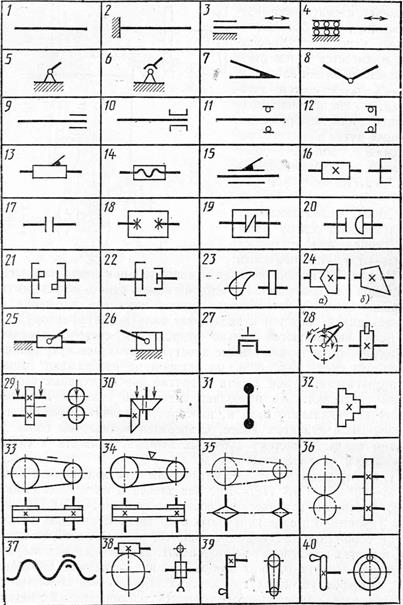 На рис. 1 приведены некоторые наиболее распространенные обозначения из ГОСТ 2.770—68* и часто встречающиеся в кинематических схемах сочетания некоторых обозначений
На рис. 1 приведены некоторые наиболее распространенные обозначения из ГОСТ 2.770—68* и часто встречающиеся в кинематических схемах сочетания некоторых обозначений
/—вал, ось, стержень и т. п.;
2 — неподвижное закрепление стержня;
3 — неподвижная опора скольжения для стержня, движущегося возвратно-поступательно;
4 — неподвижная опора качения для стержня, движущегося возвратно-поступательно;
5,6 — неподвижное звено (стойка);
7 — неподвижное соединение частей звена;
8 — вращательная кинематическая пара;
9 — подшипник на валу радиальный (без уточнения типа);
10 — радиальный подшипник скольжения;
// — радиальный подшипник качения;
12 — радиально-упорный односторонний подшипник качения;
13 — поступательная кинематическая пара;
14 — винтовая кинематическая пара;
цилиндрическая кинематическая пара;
16 — неподвижное соединение детали с валом, стержнем;
17 — муфта (общее обозначение);
18 — глухая муфта; 19 — упругая муфта; 20 — компенсирующая муфта;
21 — сцепляемая механическая синхронная муфта, например зубчатая;
22 — сцепляемая (управляемая) муфта (общее обозначение);
23 — плоский вращающийся кулачок;
24, а — цилиндрический барабанный кулачок;
24, б — конический барабанный кулачок;
26 — неподвижный цилиндр с поршнем и шатуном;
27 — соединение коленчатого вала с шатуном;
28 — храповой зубчатый механизм односторонний с наружным зацеплением;
29 — фрикционная передача с цилиндрическими роликами;
30 — фрикционная передача с коническими роликами;
31—маховик на валу;
32 — ступенчатый шкив, закрепленный на валу;
33 — открытая передача плоским ремнем;
34 — передача клиновидным ремнем;
35 — передача цепью (без уточнения типа цепи);
36 — цилиндрическая зубчатая передача (без уточнения типа зубьев);
37 — неразъемная гайка на винте, передающем движение;
38 — передача червячная с цилиндрическим червяком;
Зная условные обозначения для кинематических схем, можно сравнительно легко читать схематические изображения.
 Рассматривая кинематическую схему механизма коробки скоростей токарного станка (рис. 2), устанавливают, что на валу электродвигателя / находится шкив 2. С помощью плоскоременной передачи его вращение передается рабочему шкиву 3, находящемуся на валу /.
Рассматривая кинематическую схему механизма коробки скоростей токарного станка (рис. 2), устанавливают, что на валу электродвигателя / находится шкив 2. С помощью плоскоременной передачи его вращение передается рабочему шкиву 3, находящемуся на валу /.
 Вдоль оси вала / перемещается тройной блок зубчатых колес 5, 6 и 7; это дает возможность, используя колеса 4, 8, 9 промежуточного вала //, получить три различных частоты вращения. Зубчатые колеса 10 и 14 находятся в постоянном зацеплении с зубчатыми колесами // и 13 вала /// или шпинделя станка. Между колесами // и 13 шпинделя станка расположена сцепляемая двусторонняя муфта 12, которая своими выступами может быть сцеплена при передвижении с выступами ступиц зубчатых колес // и 13. При переключении муфты 12 влево шпиндель может получить от трех комбинаций блока зубчатых колес вала / через зубчатое колесо 10 три разных частоты вращения. При первом включении муфты 12 от трех комбинаций блока зубчатых колес вала / шпиндель может получить еще три частоты вращения через зубчатое колесо //. Таким образом, шпиндель токарного станка имеет шесть частот вращения или может вращаться с шестью различными числами оборотов.
Вдоль оси вала / перемещается тройной блок зубчатых колес 5, 6 и 7; это дает возможность, используя колеса 4, 8, 9 промежуточного вала //, получить три различных частоты вращения. Зубчатые колеса 10 и 14 находятся в постоянном зацеплении с зубчатыми колесами // и 13 вала /// или шпинделя станка. Между колесами // и 13 шпинделя станка расположена сцепляемая двусторонняя муфта 12, которая своими выступами может быть сцеплена при передвижении с выступами ступиц зубчатых колес // и 13. При переключении муфты 12 влево шпиндель может получить от трех комбинаций блока зубчатых колес вала / через зубчатое колесо 10 три разных частоты вращения. При первом включении муфты 12 от трех комбинаций блока зубчатых колес вала / шпиндель может получить еще три частоты вращения через зубчатое колесо //. Таким образом, шпиндель токарного станка имеет шесть частот вращения или может вращаться с шестью различными числами оборотов.
На рисунке 1а показана модель кривошипно-ползунного механизма. Кривошип 1-ведущее звено, вращающееся вокруг неподвижной оси.
Звено 3-ползун — совершает возвратно-поступательное движение. Звенья механизма связаны между собой и неподвижной стойкой 4 с помощью шарниров.
На рис. 3 изображена кинематическая схема этого механизма
Условные графические обозначения звеньев и кинематических пар механизмов должны выполняться в соответствии с ГОСТ 2.770-68. «Обозначения условные графические в схемах. Элементы кинематики»
 На рис. 1.1, а-к показаны модели различных механизмов, подобные тем, для которых нужно выполнить кинематические схемы.
На рис. 1.1, а-к показаны модели различных механизмов, подобные тем, для которых нужно выполнить кинематические схемы.
а-зубчатая передача; б-ременная передача с клиновым ремнем, в — цепная передача; г — фрикционный вариатор; д — шарнирно-рычажный механизм; е — эксцентриковый механизм; ж- модель механизма с мальтийским
крестом, зубчатой и ленточной передачами; з — кулачковый механизм; и — кулачковый и реечный механизмы; г- кулисный механизм.
При выполнении данной работы могут быть использованы и другие модели и механизмы.
Порядок выполнения работы.
1. Ознакомиться с моделью механизма или узла. Медленно привести в движение, ведущее звено проследить за движением всех остальных звеньев. Установить, какими кинематическими парами связаны между собой звенья механизма
2.Начертить кинематическую схему механизма в соответствии с условным изображением по ГОСТ 2.770-68. Измерить расстояние между центрами вращательных кинематических пар, расстояние, на которое перемещается звено поступательной пары, число зубьев зубчатых колес, диаметры шкивов и т.п. Эти размеры проставить на схеме механизма. Подсчитать число зубьев и кинематических пар. Данные записать в отчет
Отчет о работе.
Кинематическая схема механизма с указанием номера и размеров звена, вида кинематических пар и их обозначения в виде таблицы.
Вопросы для собеседования:
Источник статьи: http://megaobuchalka.ru/11/24341.html